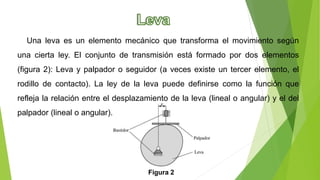
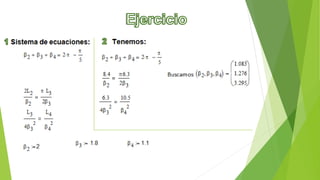
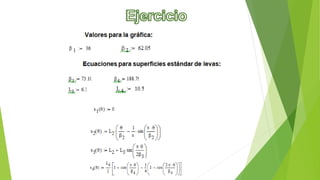
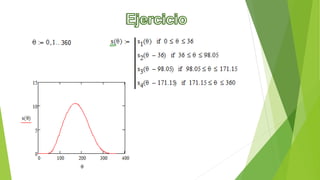
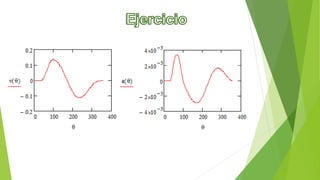
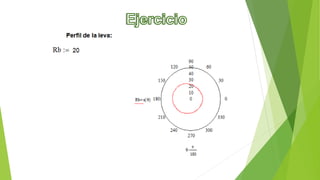
El documento describe el funcionamiento y diseño de una leva, un elemento mecánico que transforma el movimiento según una ley específica. Se detalla la relación entre el desplazamiento de la leva y el palpador, así como la importancia del perfil de la leva en función del movimiento requerido. Además, se mencionan las elevaciones, velocidades y aceleraciones en puntos específicos, junto con referencias para estudios adicionales.