Descargado 58 veces




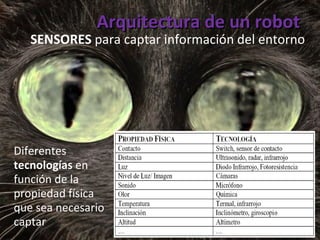
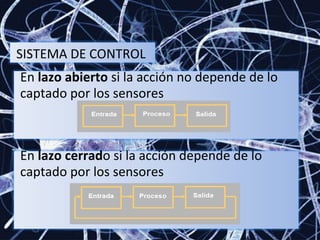




El documento define un robot como una máquina programable que puede realizar tareas de forma autónoma mediante el uso de sensores para captar información del entorno, un sistema de control para controlar sus acciones según su programación, y sistemas de locomoción y manipulación para moverse y alcanzar objetos. Describe las aplicaciones comunes de los robots industriales, de servicio, y de exploración, así como la arquitectura típica de un robot que incluye sus sensores, sistema de control, sistema de locomoción y elementos terminales.






































































































