Descargado 64 veces
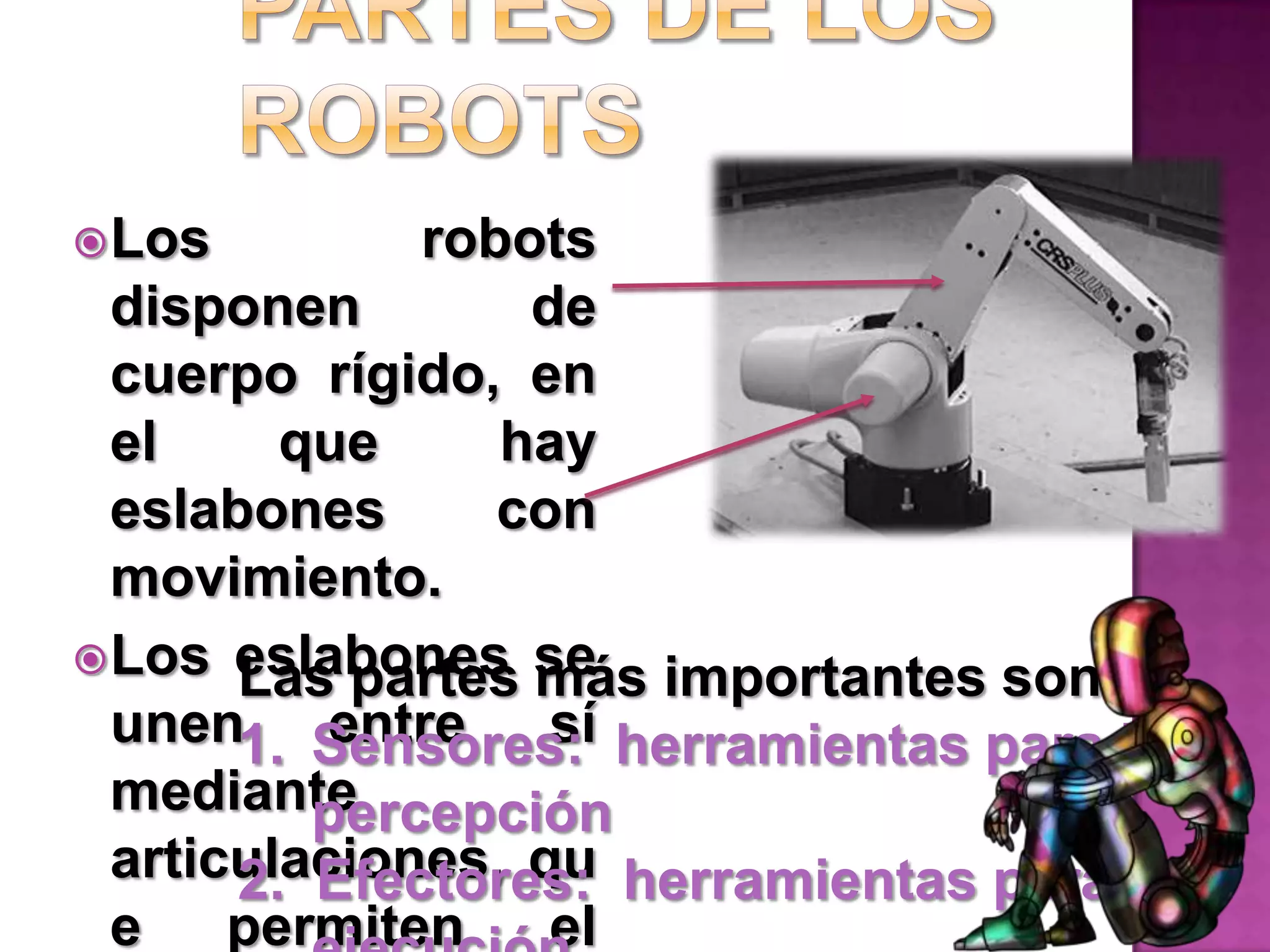
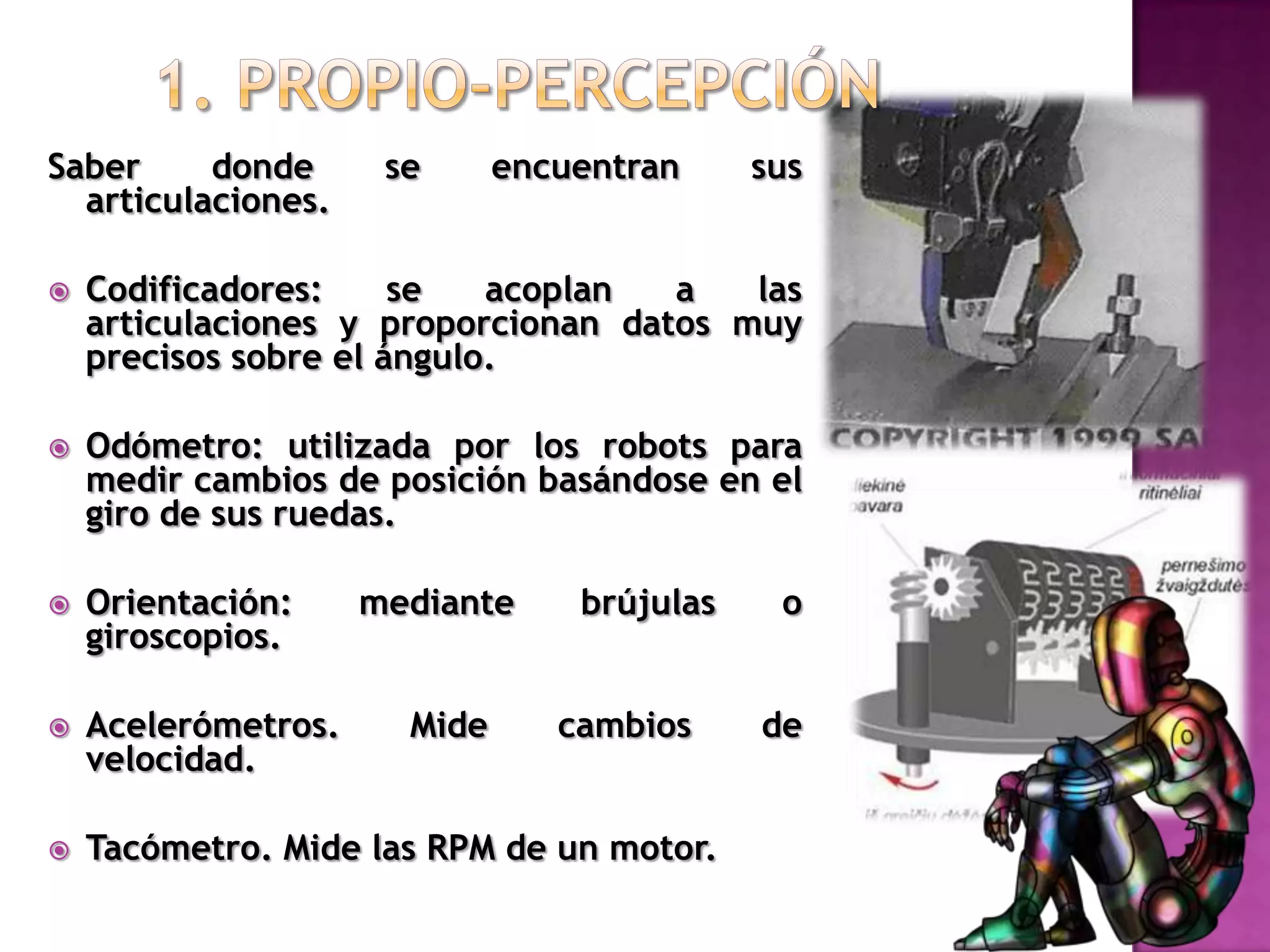
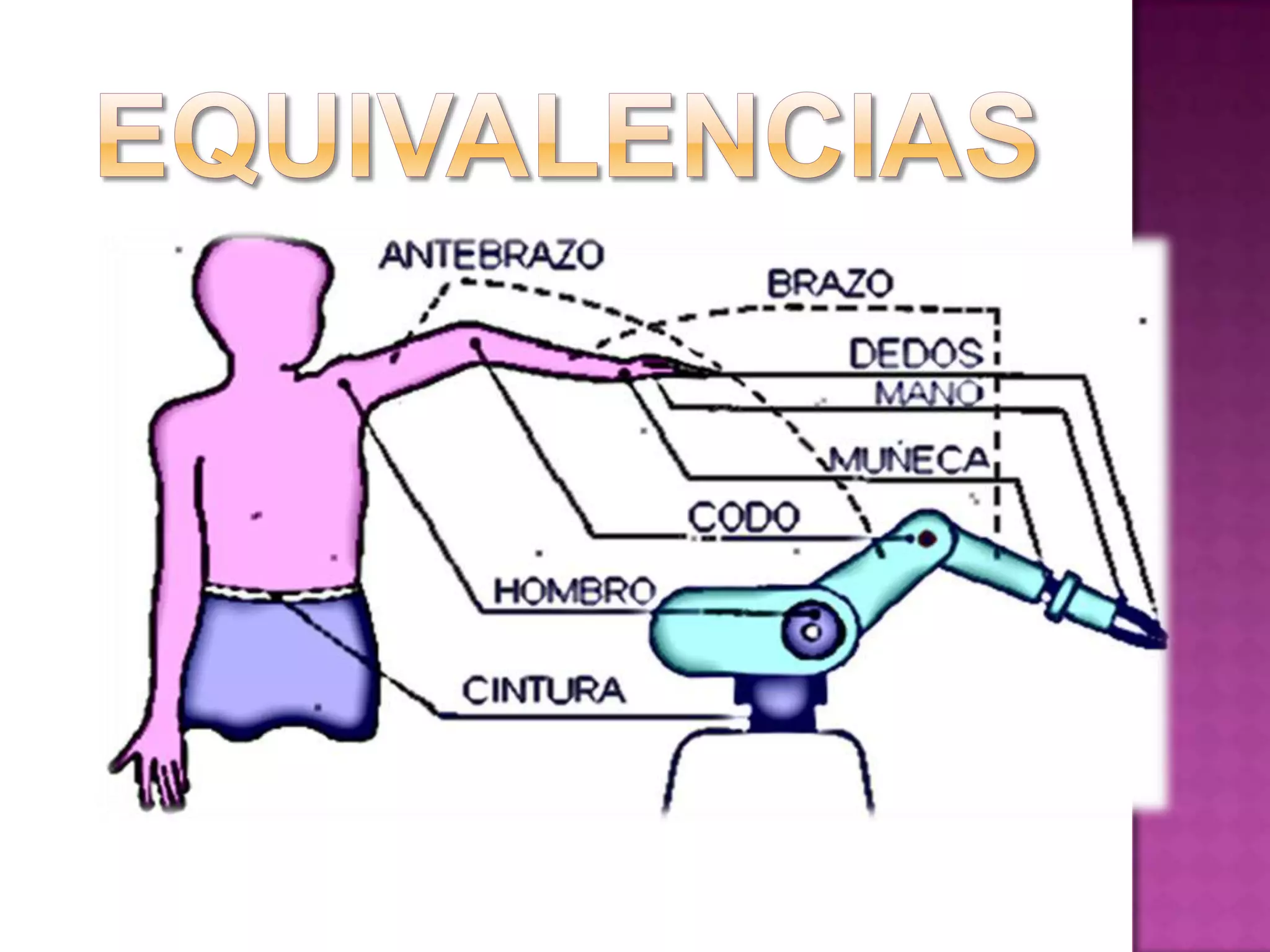

El documento describe las principales partes de un robot, incluyendo sensores y efectores. Los sensores como codificadores, odómetros y cámaras permiten al robot percibir su entorno, mientras que los efectores como ventosas, pinzas y pistolas para soldar le permiten manipular y transportar objetos. Las ruedas y llantas son comúnmente usadas para la locomoción del robot.



























































