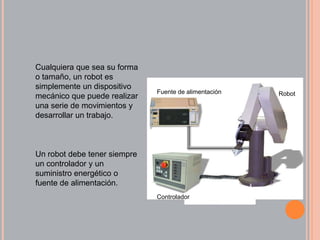
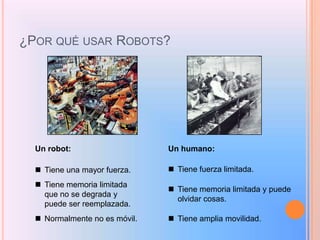
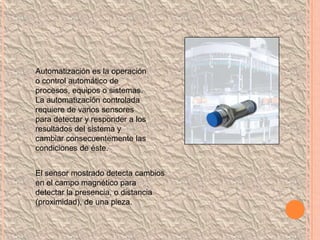
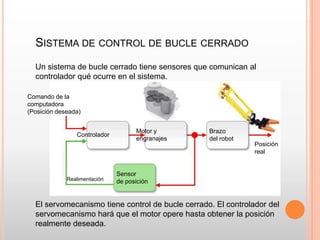
Este documento proporciona una introducción a los robots, incluyendo sus componentes principales, funciones y usos. Explica que un robot es un dispositivo mecánico controlado por una computadora que puede realizar tareas a través de movimientos. Los robots se usan comúnmente en la industria para tareas repetitivas, peligrosas o de fuerza que los humanos no pueden o no quieren hacer. El documento también describe los sensores y sistemas de control de bucle cerrado que permiten a los robots funcionar de manera automatizada.