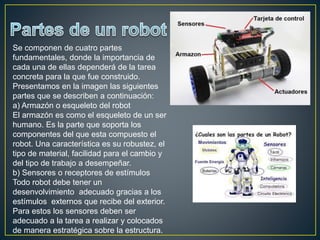
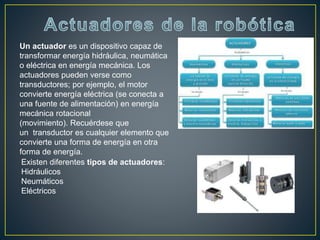
El documento proporciona una breve introducción a la robótica, describiendo su historia, componentes clave y aplicaciones. Explica que un robot se compone típicamente de un armazón, sensores, actuadores y una tarjeta de control. También describe varios tipos comunes de sensores como sensores de luz, sonido, temperatura y distancia, así como actuadores neumáticos, hidráulicos y eléctricos. Finalmente, discute cómo la robótica puede afectar el empleo al reemplazar trabajos repetitivos pero aún requ