Descargar para leer sin conexión
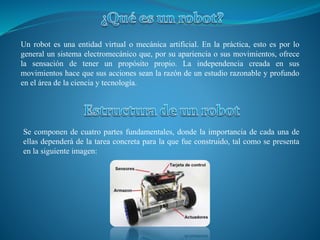



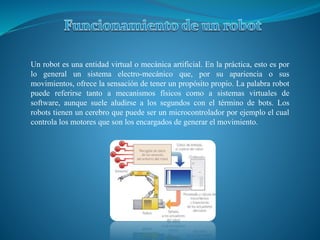

Un robot es una máquina programable que puede ejecutar tareas de manera automática basándose en su programación. Se compone de cuatro partes fundamentales: la estructura, los sensores, los actuadores y la lógica de control. La robótica es la rama de la tecnología encargada del diseño e investigación de robots para tareas específicas.


























































