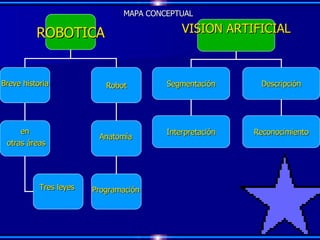
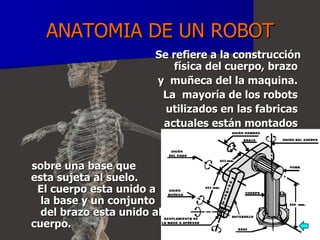
El documento habla sobre robótica y visión artificial. Brevemente describe la anatomía de un robot, las tres leyes de la robótica, y cómo la robótica se relaciona con áreas como la construcción, minería, medicina, agricultura y el hogar. También explica conceptos básicos de la visión artificial como la segmentación, descripción, interpretación y reconocimiento de imágenes.