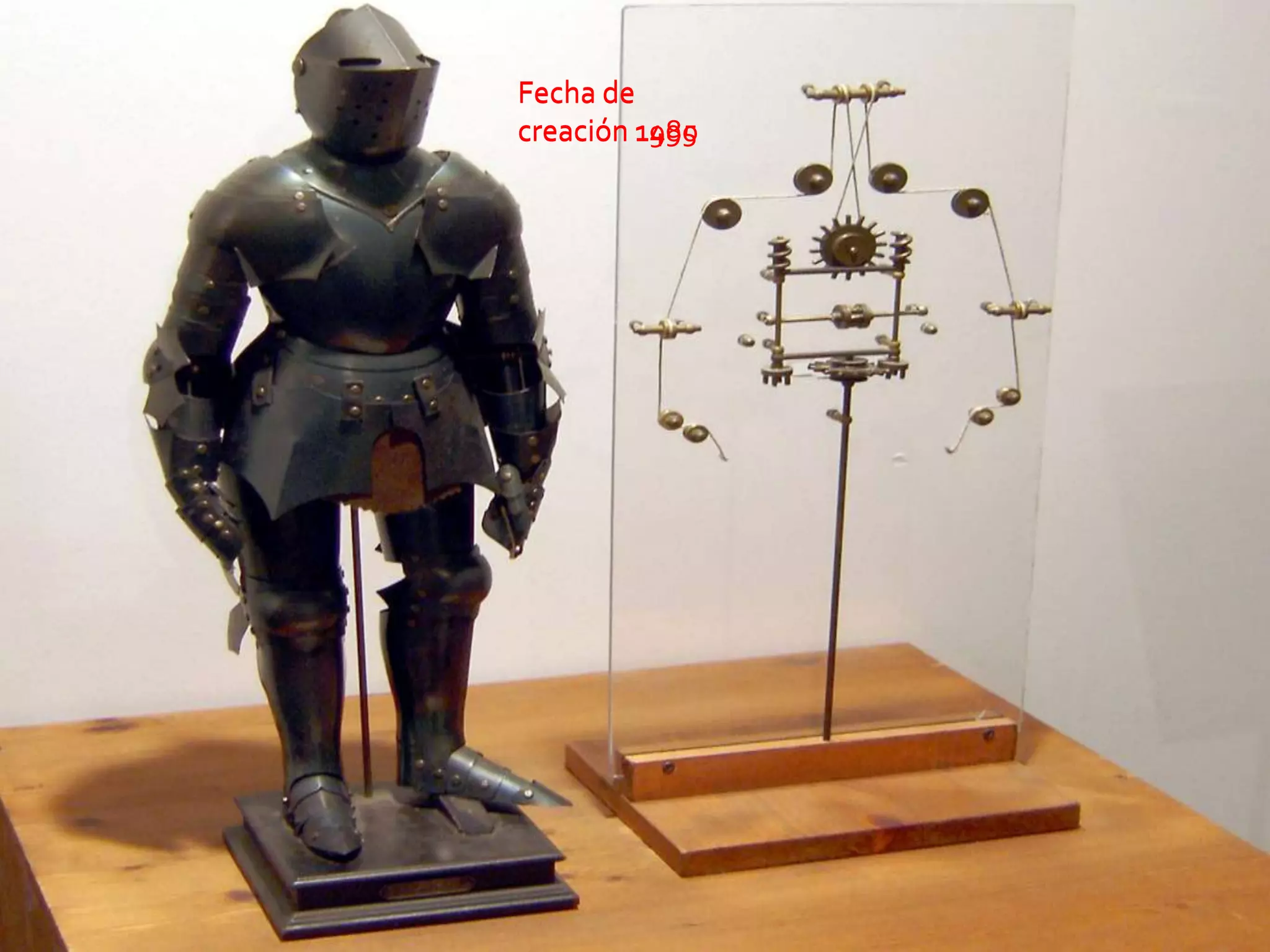
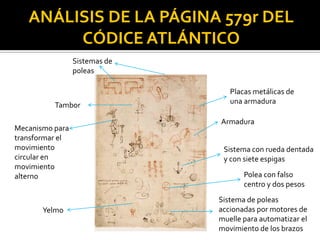
El documento describe el diseño de autómatas por Leonardo da Vinci en la Edad Media, destacando un caballero que podía imitar movimientos humanos. También se presenta a ASIMO, un robot humanoide creado por Honda en 1980, capaz de realizar diversas actividades físicas y responder a comandos de voz. Se analizan los planos de Leonardo, sugiriendo que su robot podría realizar movimientos para asustar a enemigos.