
Recomendados
Más contenido relacionado
Similar a Rotodinámica-Elemento finito.pptx
Similar a Rotodinámica-Elemento finito.pptx (20)
Último
Último (20)
Rotodinámica-Elemento finito.pptx
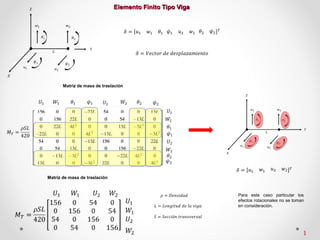
- 1. Elemento Finito Tipo Viga 𝛿 = 𝑢1 𝑤1 𝜃1 𝜓1 𝑢2 𝑤2 𝜃2 𝜓2 𝑇 𝛿 = 𝑉𝑒𝑐𝑡𝑜𝑟 𝑑𝑒 𝑑𝑒𝑠𝑝𝑙𝑎𝑧𝑎𝑚𝑖𝑒𝑛𝑡𝑜 Matriz de masa de traslación 𝜌 = 𝐷𝑒𝑛𝑠𝑖𝑑𝑎𝑑 𝐿 = 𝐿𝑜𝑛𝑔𝑖𝑡𝑢𝑑 𝑑𝑒 𝑙𝑎 𝑣𝑖𝑔𝑎 𝑆 = 𝑆𝑒𝑐𝑐𝑖ó𝑛 𝑡𝑟𝑎𝑛𝑠𝑣𝑒𝑟𝑠𝑎𝑙 𝛿 = 𝑢1 𝑤1 𝑢2 𝑤2 𝑇 Matriz de masa de traslación Para este caso particular los efectos rotacionales no se toman en consideración. 1
- 2. Elemento Finito Tipo Viga 𝛿 = 𝑢1 𝑤1 𝑢2 𝑤2 𝑇 Matriz de masa de rotación Matriz de masa de rotación 𝜌 = 𝐷𝑒𝑛𝑠𝑖𝑑𝑎𝑑 𝐿 = 𝐿𝑜𝑛𝑔𝑖𝑡𝑢𝑑 𝑑𝑒 𝑙𝑎 𝑣𝑖𝑔𝑎 𝐼 = 𝑀𝑜𝑚𝑒𝑛𝑡𝑜 𝑑𝑒 𝑖𝑛𝑒𝑟𝑐𝑖𝑎 Para este caso particular los efectos rotacionales no se toman en consideración. 2
- 3. Elemento Finito Tipo Viga 𝛿 = 𝑢1 𝑤1 𝑢2 𝑤2 𝑇 Matriz de efectos giroscópicos 𝜌 = 𝐷𝑒𝑛𝑠𝑖𝑑𝑎𝑑 𝐿 = 𝐿𝑜𝑛𝑔𝑖𝑡𝑢𝑑 𝑑𝑒 𝑙𝑎 𝑣𝑖𝑔𝑎 𝐼 = 𝑀𝑜𝑚𝑒𝑛𝑡𝑜 𝑑𝑒 𝑖𝑛𝑒𝑟𝑐𝑖𝑎 Matriz de efectos giroscópicos Ω = 𝑉𝑒𝑙𝑜𝑐𝑖𝑑𝑎𝑑 𝑎𝑛𝑔𝑢𝑙𝑎𝑟 Para este caso particular los efectos rotacionales no se toman en consideración. 3
- 4. Elemento Finito Tipo Viga 𝛿 = 𝑢1 𝑤1 𝑢2 𝑤2 𝑇 Matriz de rigidez 𝐿 = 𝐿𝑜𝑛𝑔𝑖𝑡𝑢𝑑 𝑑𝑒 𝑙𝑎 𝑣𝑖𝑔𝑎 𝐼 = 𝑀𝑜𝑚𝑒𝑛𝑡𝑜 𝑑𝑒 𝑖𝑛𝑒𝑟𝑐𝑖𝑎 Para este caso particular los efectos rotacionales no se toman en consideración. Matriz de rigidez 𝐸 = 𝑀ó𝑑𝑢𝑙𝑜 𝑑𝑒 𝑌𝑜𝑢𝑛𝑔 Donde: 𝑎 = 12𝐸𝐼 𝐺𝑆𝑟𝐿2 G = 𝐸 2(1 + 𝜐) Cortante 𝜐 Relación de Poisson 𝑆𝑟 Sección transversal Si 𝑎 = 0, la matriz de rigidez se convierte en la matriz clásica de rigidez para una viga en flexión. 4
- 5. 𝐶𝑜𝑛𝑠𝑖𝑑𝑒𝑟𝑎𝑛𝑑𝑜 𝐹𝜃 = 𝐹𝜓 = 0 Soportes Chumaceras Soportes 5
- 6. Ensamble Matriz Global EJEMPLO (Matriz de masa de traslación) 𝐸𝑙𝑒𝑚𝑒𝑛𝑡𝑜 𝑓𝑖𝑛𝑖𝑡𝑜 1 = 𝜌1𝑆1𝐿1 420 𝐸𝑙𝑒𝑚𝑒𝑛𝑡𝑜 𝑓𝑖𝑛𝑖𝑡𝑜 2 = 𝜌2𝑆2𝐿2 420 𝐸𝑙𝑒𝑚𝑒𝑛𝑡𝑜 𝑓𝑖𝑛𝑖𝑡𝑜 3 = 𝜌3𝑆3𝐿3 420 𝐸𝑙𝑒𝑚𝑒𝑛𝑡𝑜 𝑓𝑖𝑛𝑖𝑡𝑜 4 = 𝜌4𝑆4𝐿4 420 4 Elementos finitos 5 Nodos 2 GdL por nodo 10 GdL en total (sistema global 6
- 7. Ensamble Matriz Global EJEMPLO (Matriz de masa de traslación) 𝐸𝑙𝑒𝑚𝑒𝑛𝑡𝑜 𝑓𝑖𝑛𝑖𝑡𝑜 1 = 𝜌1𝑆1𝐿1 420 𝐸𝑙𝑒𝑚𝑒𝑛𝑡𝑜 𝑓𝑖𝑛𝑖𝑡𝑜 2 = 𝜌2𝑆2𝐿2 420 𝐸𝑙𝑒𝑚𝑒𝑛𝑡𝑜 𝑓𝑖𝑛𝑖𝑡𝑜 3 = 𝜌3𝑆3𝐿3 420 𝐸𝑙𝑒𝑚𝑒𝑛𝑡𝑜 𝑓𝑖𝑛𝑖𝑡𝑜 4 = 𝜌4𝑆4𝐿4 420 4 Elementos finitos 5 Nodos 2 GdL por nodo 10 GdL en total (sistema global) 7
- 8. 𝑚𝑥𝑥 + 𝑐𝑥𝑥 + 𝑘𝑥𝑥 = 𝑑𝑥 𝑚𝑦𝑦 + 𝑐𝑦𝑦 + 𝑘𝑦𝑦 = 𝑑𝑦 Sistema de ecuaciones. 𝑚 a + 𝑐 a + 𝑘 𝑎 = 𝑃0 Ecuación Diferencial de Movimiento 𝑚𝑥 0 0 𝑚𝑦 𝑥 𝑦 + 𝑐𝑥 0 0 𝑐𝑦 𝑥 𝑦 + 𝑘𝑥 0 0 𝑘𝑦 𝑥 𝑦 = 𝑑𝑥 𝑑𝑦 𝑀 𝑈 + 𝑐 𝑈 + 𝑘 𝑈 = 𝐹 Se tiene que: a = 𝑥0𝐶𝑜𝑠 𝜙 𝐶𝑜𝑠 𝜔𝑡 + 𝑥0𝑆𝑒𝑛 𝜙 𝑆𝑒𝑛 𝜔𝑡 a = −𝜔 𝑥0 𝐶𝑜𝑠 𝜙 𝑆𝑒𝑛 𝜔𝑡 + 𝜔 𝑥0𝑆𝑒𝑛 𝜙 𝐶𝑜𝑠 𝜔𝑡 a = −𝜔2 𝑥0 𝐶𝑜𝑠 𝜙 𝐶𝑜𝑠 𝜔𝑡 − 𝜔2 𝑥0𝑆𝑒𝑛 𝜙 𝑆𝑒𝑛 𝜔𝑡 𝑃0 = 𝐹0 𝐶𝑜𝑠 𝜔𝑡 a = 𝑥0 𝐶𝑜𝑠 (𝜔𝑡 − 𝜙) 𝐹 = 𝐹1 𝐶𝑜𝑠 𝜔𝑡 + 𝐹2 𝑆𝑒𝑛 𝜔𝑡 𝑈 = 𝑈1 𝐶𝑜𝑠 𝜔𝑡 + 𝑈2 𝑆𝑒𝑛 𝜔𝑡 se tiene que: 𝑈 = 𝑈1 𝐶𝑜𝑠 𝜔𝑡 + 𝑈2 𝑆𝑒𝑛 𝜔𝑡 𝑈 = −𝜔 𝑈1 𝑆𝑒𝑛 𝜔𝑡 + 𝜔 𝑈2 𝐶𝑜𝑠 𝜔𝑡 𝑈 = −𝜔2 𝑈1 𝐶𝑜𝑠 𝜔𝑡 − 𝜔2 𝑈2 𝑆𝑒𝑛 𝜔𝑡 Sustituyendo 𝑃0 , a , a 𝑦 a en la ecuación diferencial de movimiento. 𝑚 (−𝜔2 𝑥0𝐶𝑜𝑠 𝜙 𝐶𝑜𝑠 𝜔𝑡 −𝜔2 𝑥0𝑆𝑒𝑛 𝜙 𝑆𝑒𝑛 𝜔𝑡 ) + 𝑐 −𝜔 𝑥0𝐶𝑜𝑠 𝜙 𝑆𝑒𝑛 𝜔𝑡 + 𝜔 𝑥0𝑆𝑒𝑛 𝜙 𝐶𝑜𝑠 𝜔𝑡 + 𝑘 (𝑥0𝐶𝑜𝑠 𝜙 𝐶𝑜𝑠 𝜔𝑡 + 𝑥0𝑆𝑒𝑛 𝜙 𝑆𝑒𝑛 𝜔𝑡) = 𝐷1 𝐶𝑜𝑠 𝜔𝑡 + 𝐷2 𝑆𝑒𝑛 𝜔𝑡 Sustituyendo 𝐹 , 𝑈 , 𝑈 y 𝑈 en la ecuación diferencial de movimiento 𝑀 −𝜔2 𝑈1 𝐶𝑜𝑠 𝜔𝑡 − 𝜔2 𝑈2 𝑆𝑒𝑛 𝜔𝑡 + 𝑐 −𝜔 𝑈1 𝑆𝑒𝑛 𝜔𝑡 + 𝜔 𝑈2 𝐶𝑜𝑠 𝜔𝑡 + 𝑘 𝑈1 𝐶𝑜𝑠 𝜔𝑡 + 𝑈2 𝑆𝑒𝑛 𝜔𝑡 = 𝐹1 𝐶𝑜𝑠 𝜔𝑡 + 𝐹2 𝑆𝑒𝑛 𝜔𝑡 Modelo matemático de un rotor de 2 GdL Modelo matemático de un rotor de 1 GdL 8 𝑑𝑥 = 𝐷1 𝐶𝑜𝑠 𝜔𝑡 + 𝐷2 𝑆𝑒𝑛 𝜔𝑡 𝑚 a + 𝑐 a + 𝑘 a = 𝑑𝑥 a = 𝑥0 𝐶𝑜𝑠 (𝜔𝑡 − 𝜙) Sistema masa - resorte Sistema rotodinámico
- 9. Agrupando en términos: −𝜔2 𝑀 𝑈1 + 𝜔 𝑐 𝑈2 + 𝑘 𝑈1 = 𝐹1 𝐶𝑜𝑠 𝜔𝑡 −𝜔2 𝑀 𝑈2 − 𝜔 𝑐 𝑈1 + 𝑘 𝑈2 = 𝐹2 𝑆𝑒𝑛 𝜔𝑡 −𝜔2 𝑚 𝑥0 𝐶𝑜𝑠 𝜙 + 𝜔 𝑐 𝑥0 𝑆𝑒𝑛 𝜙 + 𝑘 𝑥0𝐶𝑜𝑠 𝜙 = 𝐷1 −𝜔2 𝑚 𝑥0 𝑆𝑒𝑛 𝜙 − 𝜔 𝑐 𝑥0 𝐶𝑜𝑠 𝜙 + 𝑘𝑥0𝑆𝑒𝑛 𝜙 = 𝐷2 Agrupando en términos: 𝑘 − 𝜔2 𝑀 𝜔 𝑐 −𝜔 𝑐 𝑘 − 𝜔2 𝑀 𝑈1 𝑈2 = 𝐹1 𝐹2 𝑆𝑒𝑛 𝜔𝑡 𝐶𝑜𝑠 𝜔𝑡 En forma matricial se puede reescribir como: (𝑘 − 𝜔2 𝑚) (𝜔 𝑐) (− 𝜔 𝑐) (𝑘 − 𝜔2 𝑚) 𝑥0 𝐶𝑜𝑠 𝜙 𝑥0 𝑆𝑒𝑛 𝜙 = 𝐷1 𝐷2 En forma matricial se puede reescribir como: Por lo tanto: 𝑘 − 𝜔2 𝑀 𝜔 𝑐 −𝜔 𝑐 𝑘 − 𝜔2 𝑀 𝑈1 𝑈2 = 𝑑 𝐶𝑜𝑠 𝜃 𝑆𝑒𝑛 𝜃 𝑑 𝑆𝑒𝑛 𝜃 − 𝐶𝑜𝑠 𝜃 𝐷2 = 𝑑 𝑆𝑒𝑛 𝜃 𝐷1 = 𝑑 𝐶𝑜𝑠 𝜃 𝐹1 = 𝐷1 𝐷2 𝐹2 = 𝐷2 −𝐷1 𝑈1 = 𝑈1𝑥 𝑈1𝑦 𝑈2 = 𝑈2𝑥 𝑈2𝑦 Definiendo: 𝑘 − 𝜔2 𝑀 𝜔 𝑐 −𝜔 𝑐 𝑘 − 𝜔2 𝑀 𝑈1𝑥 𝑈1𝑦 𝑈2𝑥 𝑈2𝑦 = 𝑑 𝐶𝑜𝑠 𝜃 𝑆𝑒𝑛 𝜃 𝑑 𝑆𝑒𝑛 𝜃 − 𝐶𝑜𝑠 𝜃 (𝑘 − 𝜔2 𝑚) (𝜔 𝑐) (− 𝜔 𝑐) (𝑘 − 𝜔2 𝑚) 𝑥0 𝐶𝑜𝑠 𝜙 𝑥0 𝑆𝑒𝑛 𝜙 = 𝑑 𝐶𝑜𝑠 𝜃 𝑆𝑒𝑛 𝜃 𝑆𝑒𝑛 𝜔𝑡 𝐶𝑜𝑠 𝜔𝑡 Modelo matemático de un rotor de 2 GdL Modelo matemático de un rotor de 1 GdL 9 𝐷1 = 𝑑 𝐶𝑜𝑠 𝜃 𝐷2 = 𝑑 𝑆𝑒𝑛 𝜃 (𝑘 − 𝜔2 𝑚) (𝜔 𝑐) (− 𝜔 𝑐) (𝑘 − 𝜔2 𝑚) 𝑥0 𝐶𝑜𝑠 𝜙 𝑥0 𝑆𝑒𝑛 𝜙 = 𝑑 𝐶𝑜𝑠 𝜃 𝑆𝑒𝑛 𝜃 Por lo tanto:
- 10. 𝑈 = 𝑈1 2 + 𝑈2 2 ∅ = tan−1 𝑈2 𝑈1 𝑈𝑥 = 𝑈1𝑥 2 + 𝑈2𝑥 2 𝑈𝑦 = 𝑈1𝑦 2 + 𝑈2𝑦 2 ∅𝑥 = tan−1 𝑈2𝑥 𝑈1𝑥 ∅𝑦 = tan−1 𝑈2𝑦 𝑈1𝑦 (𝑘 − 𝜔2 𝑚) (𝜔 𝑐) (− 𝜔 𝑐) (𝑘 − 𝜔2 𝑚) 𝑥0 𝐶𝑜𝑠 𝜙 𝑥0 𝑆𝑒𝑛 𝜙 = 𝑑 𝐶𝑜𝑠 𝜃 𝑆𝑒𝑛 𝜃 𝑈1𝑥 𝑈1𝑦 𝑈2𝑥 𝑈2𝑦 = 𝑘 − 𝜔2 𝑀 𝜔 𝑐 −𝜔 𝑐 𝑘 − 𝜔2 𝑀 −1 𝑑 𝐶𝑜𝑠 𝜃 𝑆𝑒𝑛 𝜃 𝑑 𝑆𝑒𝑛 𝜃 − 𝐶𝑜𝑠 𝜃 𝑥0 𝐶𝑜𝑠 𝜙 𝑥0 𝑆𝑒𝑛 𝜙 = (𝑘 − 𝜔2𝑚) (𝜔 𝑐) (−𝜔 𝑐) (𝑘 − 𝜔2 𝑚) −1 𝑑 𝐶𝑜𝑠 𝜃 𝑆𝑒𝑛 𝜃 𝑥0 = (𝑥0 𝐶𝑜𝑠 𝜙)2 + (𝑥0 𝑆𝑒𝑛 𝜙)2 𝜙 = tan−1 𝑥0 𝑆𝑒𝑛 𝜙 𝑥0 𝐶𝑜𝑠 𝜙 𝑈1𝑥 𝑈1𝑦 𝑈2𝑥 𝑈2𝑦 𝑈𝑥 𝑈𝑦 ∅𝑥 ∅𝑦 Modelo matemático de un rotor de 2 GdL Modelo matemático de un rotor 1 GdL 10 𝑆𝑒𝑛 𝜔𝑡 𝐶𝑜𝑠 𝜔𝑡 𝑈1𝑥 𝑈2𝑥 = (𝑘 − 𝜔2𝑚) (𝜔 𝑐) (−𝜔 𝑐) (𝑘 − 𝜔2 𝑚) −1 𝑑 𝐶𝑜𝑠 𝜃 𝑆𝑒𝑛 𝜃 𝑥0 = 𝑈1𝑥 2 + 𝑈2𝑥 2 ∅ = tan−1 𝑈2𝑥 𝑈1𝑥 𝑑 = 𝑚 𝑒 𝜔2 𝑑 = 𝑚 𝑒 𝜔2 𝑈1𝑥 = 𝑥0 𝐶𝑜𝑠 ∅ 𝑈2𝑥 = 𝑥0 𝑆𝑒𝑛 ∅
- 11. 𝑘 10𝑥10 − 𝜔2 𝑀 10𝑥10 𝜔 𝐶 10𝑥10 −𝜔 𝐶 10𝑥10 𝑘 10𝑥10 − 𝜔2 𝑀 10𝑥10 20𝑥20 𝑈1𝑥1 𝑈1𝑧1 𝑈1𝑥2 𝑈1𝑧2 𝑈1𝑥3 𝑈1𝑧3 𝑈1𝑥4 𝑈1𝑧4 𝑈1𝑥5 𝑈1𝑧5 𝑈2𝑥1 𝑈2𝑧1 𝑈2𝑥2 𝑈2𝑧2 𝑈2𝑥3 𝑈2𝑧3 𝑈2𝑥4 𝑈2𝑧4 𝑈2𝑥5 𝑈2𝑧5 20𝑥1 = 0 0 𝑑1𝐶𝑜𝑠 𝜃1 𝑑1𝑆𝑒𝑛 𝜃1 0 0 𝑑2𝐶𝑜𝑠 𝜃2 𝑑2𝑆𝑒𝑛 𝜃2 0 0 0 0 𝑑1𝑆𝑒𝑛 𝜃1 −𝑑1𝐶𝑜𝑠 𝜃1 0 0 𝑑2 𝑆𝑒𝑛 𝜃2 −𝑑2 𝐶𝑜𝑠 𝜃2 0 0 20𝑥1 EJEMPLO 4 elementos finitos, 5 nodos, 2 GdL por nodo 𝑑1 = 𝑚1 𝑒1 𝜔2 𝑑2 = 𝑚2 𝑒2 𝜔2 𝑀 10𝑥10 𝑈 10𝑥1 + 𝐶 10𝑥10 𝑈 10𝑥1 + 𝑘 10𝑥10 𝑈 10𝑥1 = 𝐹 10𝑥1 Ecuación diferencial de movimiento Donde 11 𝑀 10𝑥10 = 𝑀𝑇 10𝑥10 + 𝑀𝑠 10𝑥10 Donde: Desbalance 1 en el Disco 1, nodo 2: 𝑑1 Desbalance 2 en el Disco 2, nodo 4: 𝑑2
- 12. 𝑈 = 𝑈1 2 + 𝑈2 2 ∅ = tan−1 𝑈2 𝑈1 𝑈1𝑥 = 𝑈1𝑥1 2 + 𝑈2𝑥1 2 ∅1𝑥 = tan−1 𝑈2𝑥1 𝑈1𝑥1 Respuesta en los diferentes nodos Nodo 1 Dirección “x” Nodo 1 Dirección “z” 𝑈1𝑧 = 𝑈1𝑧1 2 + 𝑈2𝑧1 2 ∅1𝑧 = tan−1 𝑈2𝑧1 𝑈1𝑧1 𝑈2𝑥 = 𝑈1𝑥2 2 + 𝑈2𝑥2 2 ∅2𝑥 = tan−1 𝑈2𝑥2 𝑈1𝑥2 Nodo 2 Dirección “x” Nodo 2 Dirección “z” 𝑈2𝑧 = 𝑈1𝑧2 2 + 𝑈2𝑧2 2 ∅2𝑧 = tan−1 𝑈2𝑧2 𝑈1𝑧2 𝑈3𝑥 = 𝑈1𝑥3 2 + 𝑈2𝑥3 2 ∅3𝑥 = tan−1 𝑈2𝑥3 𝑈1𝑥3 Nodo 3 Dirección “x” Nodo 3 Dirección “z” 𝑈3𝑧 = 𝑈1𝑧3 2 + 𝑈2𝑧3 2 ∅3𝑧 = tan−1 𝑈2𝑧3 𝑈1𝑧3 De forma general 𝑈1𝑥1 𝑈1𝑧1 𝑈1𝑥2 𝑈1𝑧2 𝑈1𝑥3 𝑈1𝑧3 𝑈1𝑥4 𝑈1𝑧4 𝑈1𝑥5 𝑈1𝑧5 𝑈2𝑥1 𝑈2𝑧1 𝑈2𝑥2 𝑈2𝑧2 𝑈2𝑥3 𝑈2𝑧3 𝑈2𝑥4 𝑈2𝑧4 𝑈2𝑥5 𝑈2𝑧5 20𝑥1 12
- 13. 𝑈 = 𝑈1 2 + 𝑈2 2 ∅ = tan−1 𝑈2 𝑈1 𝑈4𝑥 = 𝑈1𝑥4 2 + 𝑈2𝑥4 2 ∅4𝑥 = tan−1 𝑈2𝑥4 𝑈1𝑥4 Respuesta en los diferentes nodos Nodo 4 Dirección “x” Nodo 4 Dirección “z” 𝑈4𝑧 = 𝑈1𝑧4 2 + 𝑈2𝑧4 2 ∅4𝑧 = tan−1 𝑈2𝑧4 𝑈1𝑧4 𝑈5𝑥 = 𝑈1𝑥5 2 + 𝑈2𝑥5 2 ∅5𝑥 = tan−1 𝑈2𝑥5 𝑈1𝑥5 Nodo 5 Dirección “x” Nodo 5 Dirección “z” 𝑈5𝑧 = 𝑈1𝑧5 2 + 𝑈2𝑧5 2 ∅5𝑧 = tan−1 𝑈2𝑧5 𝑈1𝑧5 De forma general 𝑈1𝑥1 𝑈1𝑧1 𝑈1𝑥2 𝑈1𝑧2 𝑈1𝑥3 𝑈1𝑧3 𝑈1𝑥4 𝑈1𝑧4 𝑈1𝑥5 𝑈1𝑧5 𝑈2𝑥1 𝑈2𝑧1 𝑈2𝑥2 𝑈2𝑧2 𝑈2𝑥3 𝑈2𝑧3 𝑈2𝑥4 𝑈2𝑧4 𝑈2𝑥5 𝑈2𝑧5 20𝑥1 13