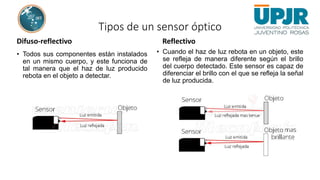
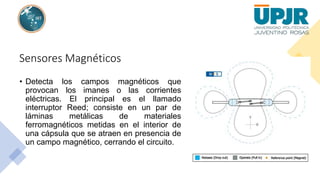
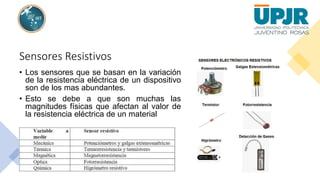
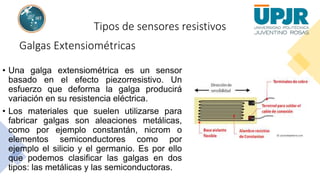
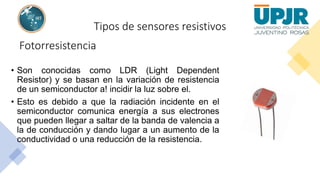
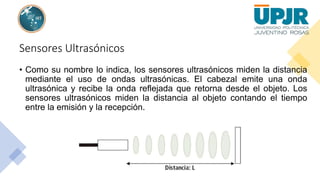
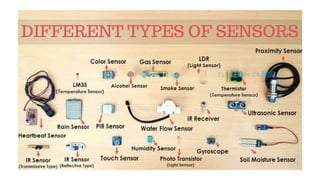
Este documento describe diferentes tipos de sensores y variables de instrumentación. Explica que el primer sensor conocido fue el termómetro de mercurio creado por Fahrenheit en 1714. Luego define las variables de medición como cantidades que varían con el tiempo y que pueden medirse y controlarse. Finalmente, detalla diversos tipos de sensores como mecánicos, ópticos, magnéticos, resistivos y ultrasónicos, describiendo sus características y aplicaciones.