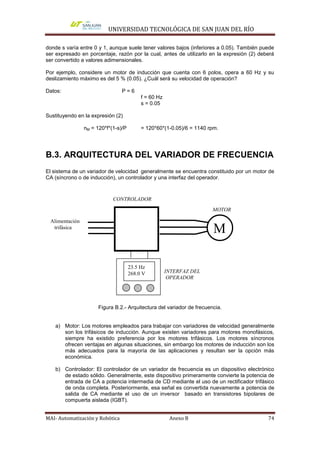
El documento describe el funcionamiento y características de los variadores de frecuencia. Explica que los variadores de frecuencia controlan la velocidad de los motores eléctricos variando la frecuencia de alimentación al motor. La velocidad del motor depende directamente de la frecuencia y el número de polos. Los variadores constan de un controlador electrónico que convierte la corriente de entrada y un interfaz de operador. Permiten un arranque suave controlando la aceleración y desaceleración del motor.