Descargado 362 veces
















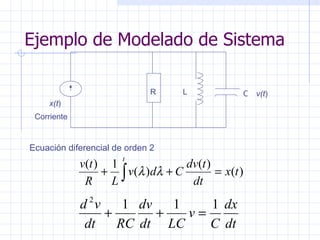



Este documento trata sobre sistemas lineales invariantes en el tiempo. Explica que la respuesta de un sistema LTI a una entrada es la convolución de la entrada con la respuesta al impulso del sistema. También describe cómo modelar sistemas usando bloques básicos como sumadores e integrales para simular ecuaciones diferenciales de cualquier orden.























































































