
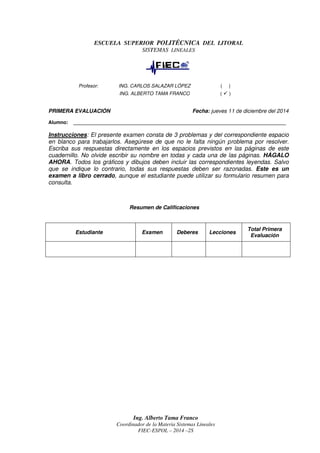





![Tercer Tema (24 puntos):
Un estudiante de la materia Sistemas Lineales de la ESPOL, ha encontrado que un
determinado sistema LTI-DT causal, en el dominio de tiempo discreto, tiene la siguiente
representación:
− − ± − − ± g
=
= = ⇒
1.6 1.6 4 1 0.63 1.6 0.04 0.7
2 1 2 0.9
n n
c y n = c + c
−
4
b
n n n
= + ⇒ = + +
h n n y n n h n n c n c n
n n
h n = − d n + c μ n + c μ n
Ing. Alberto Tama Franco
Coordinador de la Materia Sistemas Lineales
FIEC-ESPOL – 2014 –2S
S
S
D
D
y[n]
x[n]
1.6
−0.63
4
D
D
−
Determinar:
a) La respuesta impulso h[n].
b) La respuesta de paso s[n]
c) ¿El sistema es BIBO estable?,
justifique su respuesta.
De la representación anterior, se puede obtener que la ecuación de diferencias, que
representa al precitado sistema LTI-DT causal, sea la siguiente:
y [n] = 4x[n −1]− 4x[n − 2]+1.6y [n −1]− 0.63y [n − 2]
y [n]−1.6 y [n −1]+ 0.63y [n − 2] = 4x[n −1]− 4x[n − 2]
y [n + 2]−1.6y [n +1]+ 0.63y [n] = 4x[n +1]− 4x[n]
( ) [ ] ( ) [ ] 2 E −1.6E + 0.63 y n = 4E − 4 x n
[ ] 2 Q g = 0 ⇒ g −1.6g + 0.63 = 0
( ) ( ) ( )( )
( )
2
1
2
g
g
=
[ ] ( 0.7 ) ( 0.9
) 1 2
[ ] [ ] [ ] [ ] [ ] [ ] ( 0.7 ) [ ] ( 0.9
) [ ] 1 2
0.63
c
n
a
d μ d μ μ
[ ] 6.3492 [ ] ( 0.7 ) [ ] ( 0.9
) [ ] 1 2
Ahora se procederá a determinar las condiciones de frontera para la respuesta impulso, es
decir:](https://image.slidesharecdn.com/ssll-pe-2014-2s-141211094721-conversion-gate01/85/SSLL-PE-2014-2S-7-320.jpg)
![h[n] = 4d [n −1]− 4d [n − 2]−0.63h[n − 2]+1.6h[n −1]
h[0] = 4d [−1]− 4d [−2]− 0.63h[−2]+1.6h[−1] ⇒ h[0] = 0
h[1] = 4d [0]− 4d [−1]− 0.63h[−1]+1.6h[0] ⇒ h[1] = 4
[ ] [ ] ( ) [ ] ( ) [ ] 0 0
h 0 = 0 = −6.3492 d 0 + c 0.7 μ 0 + c 0.9 μ 0
1 2
−6.3492 + c + c = 0 ⇒ c + c = 6.3492
1 2 1 2
[ ] [ ] ( ) [ ] ( ) [ ] 1 1
h 1 = 4 = −6.3492 d 1 + c 0.7 μ 1 + c 0.9 μ 1
1 2
4 = c 0.7 + c 0.9 ⇒ 0.7c + 0.9c = 4
( ) ( ) 1 2 1 2
+ = =
⇒
+ = = −
6.3492 8.5714
c c c
1 2 1
0.7 0.9 4 2.2222
c c c
1 2 2
n n
[ ] 6.3492 [ ] 8.5714(0.7) [ ] 2.2222(0.9) [ ]
h n = − d n + μ n − μ n
A continuación se procederá a determinar la respuesta de paso de dicho sistema, misma
que es su respuesta frente a una excitación escalón unitario, es decir:
s [n] = μ [n]* h[n]
[ ] [ ] { 6.3492 [ ] 8.5714(0.7) n [ ] 2.2222(0.9) n
[ ]}
y n = μ n * − d n + μ n − μ n
1
− n
+ 1
g
Recordando que: n [ n ] [ n ] [ n
]
* =
g μ μ μ
1
− g
n n
− n + −
n
+ = − + −
y n μ n μ n μ n
− −
= − + − n + − − n
+
s n μ n μ n μ n
+ +
n n
= −
s n μ n μ n
n n
Ing. Alberto Tama Franco
Coordinador de la Materia Sistemas Lineales
FIEC-ESPOL – 2014 –2S
, se tendría lo siguiente:
[ ] 6.3492 [ ] [ ] 8.5714(0.7) [ ] [ ] 2.2222(0.9) [ ] [ ]
y n = − μ n *d n + μ n *μ n − μ n *μ n
[ ] [ ]
( )
[ ]
( )
[ ]
1 1
1 0.7 1 0.9
6.3492 8.5714 2.2222
1 0.7 1 0.9
[ ] [ ] ( 1 1
6.3492 28.5713 1 0.7 ) [ ] 22.222 1 ( 0.9
) [ ] [ ] 1 22.222 ( 0.9 ) [ ] 28.5713 ( 1
0.7
) [ ] [ ] 20(0.9) [ ] 20(0.7) [ ]
s n = μ n − μ n](https://image.slidesharecdn.com/ssll-pe-2014-2s-141211094721-conversion-gate01/85/SSLL-PE-2014-2S-8-320.jpg)



Este documento presenta un examen de Sistemas Lineales que contiene 3 problemas a resolver. Se pide determinar respuestas de impulso y paso de subsistemas en serie y paralelo, así como energías de señales de entrada y salida. También se pide analizar la causalidad y estabilidad BIBO de un sistema formado por 5 subsistemas interconectados. Finalmente, se pide hallar la respuesta impulso y de paso de un sistema LTI discreto dado.




















































































