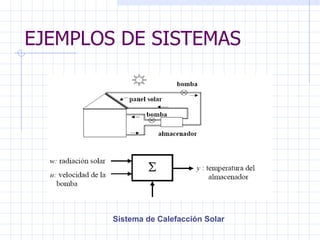
El documento define un sistema como una combinación e interconexión de componentes para realizar una tarea. Matemáticamente, un sistema relaciona una entrada con una salida a través de ecuaciones. Un sistema físico está sujeto a leyes físicas y procesa señales de entrada para generar señales de salida. Los sistemas pueden ser lineales o no lineales, invariantes o variantes en el tiempo, causales o no causales, estables o inestables, con o sin memoria.

![Sistemas Matem á ticamente, un sistema es la relaci ó n funcional entre una entrada "x" y la salida "y". y(t) = T [x(t)] x continua y(n) = T [x(n)] x discreta La representaci ó n normal de un sistema (tiempo continuo) se realiza normalmente a trav é s de ecuaciones diferenciales. Se relacionan la salida y(t) y la entrada x(t) mediante constantes, par á metros y variables independientes (tiempo):](https://image.slidesharecdn.com/sistemas-1230657080123444-2/85/Sistemas-3-320.jpg)



![Clasificaci ó n de los Sistemas Lineales y no lineales : Un sistema es lineal si se puede aplicar el principio de superposici ó n, es decir, si y 1 (t)= T [ x 1 (t) ] y y 2 (t) = T [ x 2 (t) ] entonces si el sistema es lineal, se cumplir á que: T [a x 1 (t) + b x 2 (t) ] = a y 1 (t) + b y 2 (t) . Ejemplos: T [ x(t) ] = a x(t) es un sistema lineal. T [ x(t) ] = a x 2 (t) es no lineal T [ x(t) ] = a x(t) + b es un sistema no lineal. A este tipo de sistema se le llama lineal incremental .](https://image.slidesharecdn.com/sistemas-1230657080123444-2/85/Sistemas-7-320.jpg)
![Clasificaci ó n de los Sistemas Invariante o variante en el tiempo : Un sistema donde y(t) = T [ x(t) ] se dice que es invariante en el tiempo si al excitarlo con x( t - t 0 ) genera y( t - t 0 ). La definici ó n es similar para sistemas discretos. En otras palabras el comportamiento del sistema no cambia con el tiempo. Ejemplo: y(t) =t x(t) es variante en el tiempo . Causal o no causal: Un sistema es causal si la salida no comienza antes de aplicar la excitaci ó n de entrada, es decir si no es anticipativo. La salida para t= t 0 ( ó para n= n 0 ) , solo depende de los valores de entrada para t menor que t 0 (o para n menor n 0 ) y de los valores de la salida para t menor que t 0 ( ó para n menor que n 0 ) Cuando las se ñ ales provenientes de un proceso f í sico son almacenadas, uno puede realizar sobre ella procesamiento de tipo no causal.](https://image.slidesharecdn.com/sistemas-1230657080123444-2/85/Sistemas-8-320.jpg)