
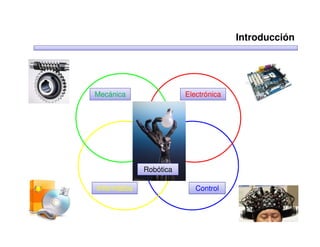
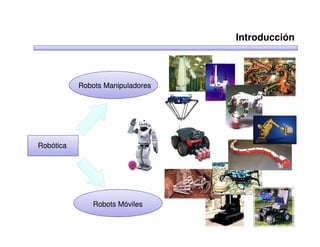


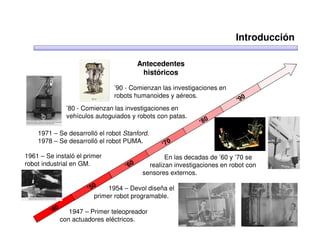
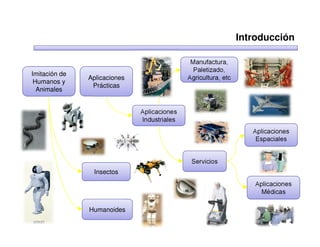


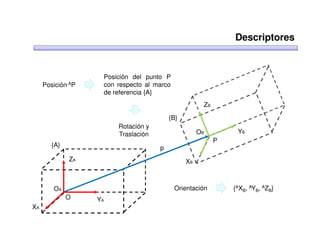
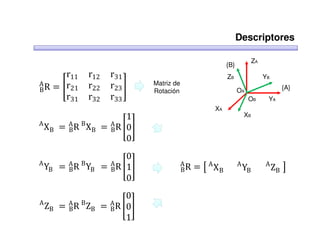
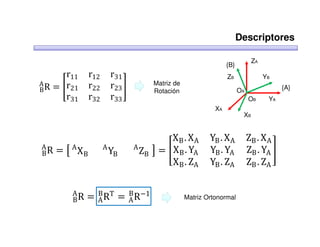
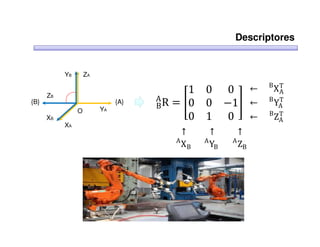
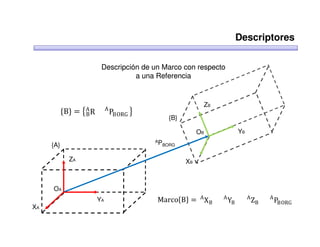
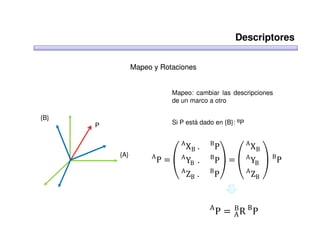
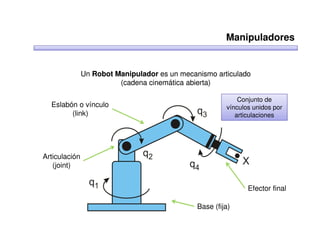
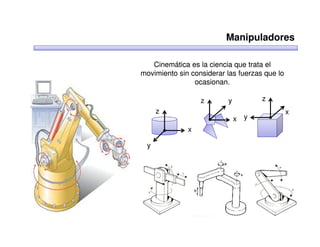
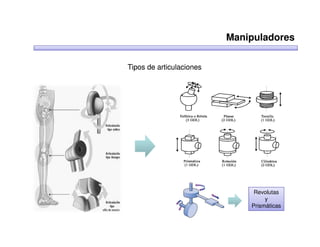
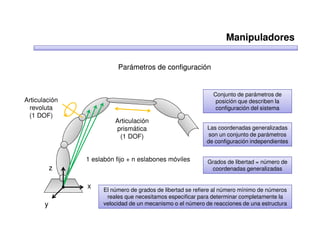
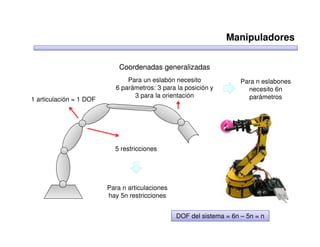
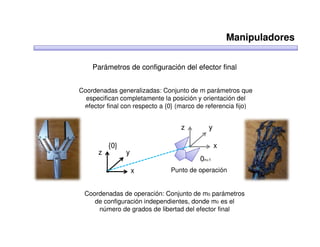
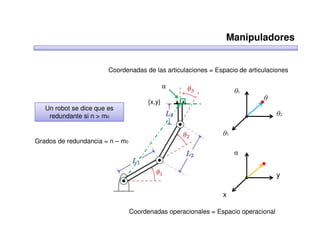
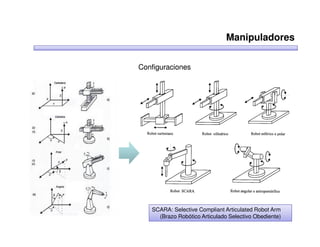
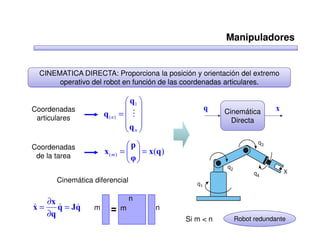
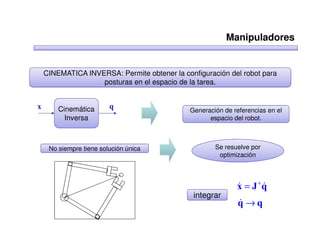
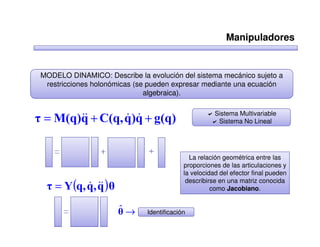

Este documento trata sobre robótica. Explica que la robótica involucra mecánica, electrónica, informática y control. Describe robots manipuladores y móviles, y cómo se usan descriptores espaciales como posición, orientación y matrices de rotación para controlar los movimientos de los robots.



































































