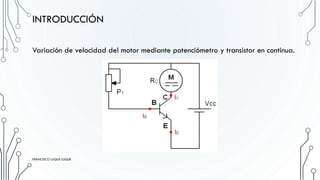
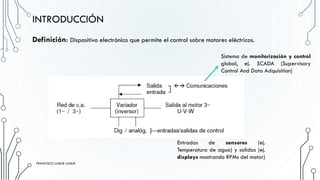
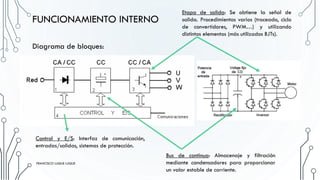
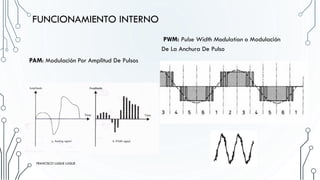
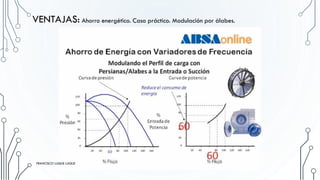
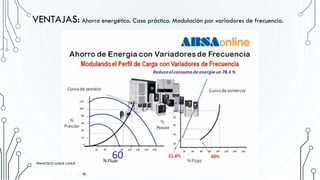
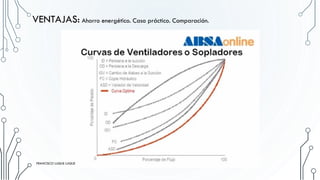
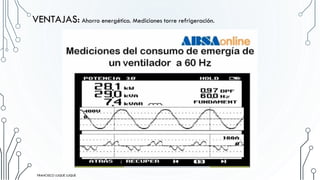
Este documento resume los variadores de frecuencia, incluyendo su definición, funcionamiento interno, principios físicos, ventajas y desventajas. Un variador de frecuencia es un dispositivo electrónico que permite controlar motores eléctricos variando su velocidad mediante el cambio de la frecuencia de alimentación. Funciona modulando la anchura de pulso de la señal de salida para variar la velocidad del motor de acuerdo a la frecuencia aplicada. Esto permite ahorrar energía variando la velocidad de bombas,