1. El sistema somatosensorial o los sentidos corporales
GENERALIDADES
El tacto es el sentido corporal con el que se perciben sensaciones de contacto, presión y
temperatura, y, en segundo lugar, como la acción de tocar o palpar. Sin embargo, parece
necesario contemplar también la percepción del propio cuerpo, o propiocepción, dentro de
esta modalidad sensorial. El sistema somatosensorial, es un sistema que engloba, a un
tiempo, nuestra sensibilidad por contacto con el exterior de nuestra superficie corporal, el
tacto, y la sensibilidad de nuestro propio cuerpo, o propiocepción.
La función principal del sistema somatosensorial es la de informar de las diferentes
cualidades de los contactos que se dan entre nuestro cuerpo y el entorno o entre las
diferentes partes del cuerpo. Un aspecto muy relevante del sistema somatosensorial es el
papel que desempeña la actividad intencional del sujeto: el tacto no puede entenderse sin
el acto de tocar.
El sistema somatosensorial engloba cuatro sentidos corporales:
1) el tacto
2) la propiocepción
3) la percepción de la temperatura
4) el dolor
Estos sentidos corporales, o subsistemas, trabajan de manera coordinada. Puesto que
algunos receptores somatosensoriales participan en varios de estos subsistemas, esta
distinción está basada en los distintos tipos de contenidos perceptivos y no en una
diferenciación anatómico-funcional estricta.
Las divisiones anatomofuncionales no se corresponden, por tanto, con las clasificaciones en
términos perceptivos.
La piel, estímulos y receptores somatosensoriales
Mientras que otros sistemas sensoriales, como la visión, se caracterizan por poseer un único órgano receptor situado en una localización particular,
en el caso del sistema somatosensorial lo que encontramos es un amplio conjunto de receptores, de diferentes tipos, distribuidos por la superficie
de la piel y también por otras zonas del cuerpo, como los órganos internos, los músculos, las articulaciones y los tendones.
LA PIEL: La piel es el mayor órgano del cuerpo humano. Ocupa aproximadamente 2 m2 y su espesor varía entre los 0,5 mm en los párpados y los 4
mm en el talón. En un individuo adulto se estima que sólo la piel llega a tener un peso aproximado de 5 kg.
La función principal de la piel es la delimitación del organismo, ya que actúa como barrera protectora que separa al organismo del medio que lo
rodea y contribuye a mantener íntegras sus estructuras.
La piel se compone de tres capas principales: la epidermis, la dermis y la hipodermis; la primera es la más externa y la última, la más interna.
Desde el punto de vista funcional, sin embargo, se reducen a dos, epidermis y dermis, cuando se trata de describir su funcionamiento. La piel posee
también algunas estructuras, denominadas anexos cutáneos, que dependen de ella, como los pelos, las uñas, las glándulas sebáceas y las
sudoríparas. Algunas características de la piel son importantes para entender su función como órgano táctil.
La piel es viscoelástica, es decir, ofrece cierto grado de resistencia a la par que sufre cierto grado de deformación al entrar en contacto con los
objetos. Gracias a que la piel es viscoelástica, trasmite al interior parte de la energía que recibe del medio, mientras que otra parte es absorbida y
retenida, o utilizada para que la piel retorne a su estado original. Por tanto, los estímulos exteriores son filtrados por la piel, puesto que ésta
atenúa, modifica o amplía su efecto sobre los receptores neurales. Este efecto modulador de la piel varía según la zona del cuerpo.
LOS ESTÍMULOS SENSORIALES: El sistema somatosensorial actúa principalmente por contacto directo con objetos que alcanzan al cuerpo. De
manera más precisa, deberíamos decir que los receptores de este sistema sensorial informan tanto de las diferentes formas de resistencia de los
objetos a nuestro movimiento, como de las distintas formas de deformación generadas por el contacto con nuestra superficie corporal.
Por tanto, son estímulos del sistema somatosensorial aquellos capaces de producir estos efectos.
Además, la piel responde de manera específica a cualquiera de estos estímulos cuando su intensidad es capaz de producir un daño en los tejidos
corporales. Esta respuesta es la respuesta de dolor.
No es posible asociar de una manera unívoca la percepción consciente de una modalidad específica de sensación somatosensorial con la activación
de un tipo particular de sistema fibra-receptor: los estímulos que entran en contacto con la piel suelen activar múltiples receptores
somatosensoriales diferentes.
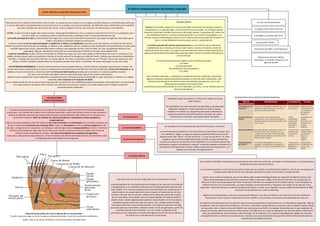
Representación gráfica de la piel y algunos de sus componentes.
Pueden observarse algunos de los receptores somatosensoriales, como los corpúsculos de Meissner,
Ruffini y Pacini, los discos de Merkel, y las terminaciones nerviosas libres
LOS RECEPTORES
SOMATOSENSORIALES:
El sistema somatosensorial cuenta con un conjunto de receptores capaces de informar no sólo del estado de
nuestra piel, sino también de la posición de las distintas partes del cuerpo y del esfuerzo muscular que realizamos.
Dada la variedad de estímulos que actúan sobre el sistema somatosensorial, éste cuenta con un conjunto muy
variado de receptores. Éstos se clasifican en mecanorreceptores, nociceptores, termorreceptores y
propioceptores.
Algunos de estos receptores están formados por las ramas terminales, no mielinizadas, de la neurona sensorial, por
lo que se denominan terminaciones nerviosas libres. Tanto los nociceptores como los termorreceptores son de
este tipo. La mayoría de los receptores, sin embargo, muestran algún tipo de encapsulamiento, es decir, el terminal
nervioso está rodeado por algún tipo de estructura que modula la respuesta neuronal y determina el tipo de
estímulo al que responderá el receptor. Los mecanorreceptores son receptores encapsulados.
A pesar de su alto grado de especialización, el funcionamiento del sistema somatosensorial ha de entenderse como
la integración de los tipos diferentes de respuesta. Los mecanorreceptores
Los nociceptores
Los termorreceptores
Los propioceptores
son receptores sensibles a las deformaciones mecánicas de la piel como la flexión, la presión o el estiramiento, y a las dimensiones
temporales de estas transformaciones.
Los mecanorreceptores se caracterizan por tener canales iónicos sensibles a la deformación mecánica, ante la que son capaces de
producir potenciales de acción. No sólo están presentes en la piel, sino en todo el cuerpo humano.
Existen varios mecanorreceptores, que se han diferenciado anatomofisiológicamente por responder de distinta manera a las
diferentes propiedades de los estímulos mecánicos (Valbo y Johansson, 1984). Entre ellos encontramos los corpúsculos de
Meissner y Pacini, las terminaciones de Rufini, los discos de Merkel y los receptores de los folículos pilosos. Estos receptores se
diferencian entre sí en su localización, su campo receptivo, la persistencia de su respuesta y el margen de frecuencias al que
responden. Todos ellos tienen un umbral muy bajo de activación, es decir, que responden incluso cuando la estimulación es débil.
Por tanto, se caracterizan por su alta sensibilidad.
Algunos mecanorreceptores, como los corpúsculos de Meissner y los discos de Merkel, se sitúan más cerca de la epidermis,
mientras que otros, como los corpúsculos de Pacini y Ruffini, se encuentran en los niveles más profundos de la dermis.
Una diferencia fundamental entre los distintos tipos de mecanorreceptores la encontramos en su velocidad de adaptación: algunos
receptores, como los corpúsculos de Meissner y de Pacini, responden cuando aparece un estímulo, pero se adaptan rápido y dejan
de responder; otros, como los discos de Merkel y las terminaciones de Ruffini, se adaptan lentamente, por lo que responden de
manera continuada mientras el estímulo está presente. Esta diferencia en la tasa de adaptación nos permite obtener información
sobre las características, tanto estáticas como dinámicas, de los estímulos: los receptores de adaptación rápida nos informan
principalmente de los cambios en la estimulación, mientras que los de adaptación lenta permiten obtener información sobre las
características del objeto estimular.
responden cuando se produce un daño en los tejidos en los que
están insertos.
Los nociceptores son terminaciones nerviosas libres, situadas justo
debajo de la epidermis. Están repartidos por todo el cuerpo,
excepto en el cerebro. Su respuesta puede estar producida por
estímulos mecánicos de presión excesiva; térmicos, por calor o
frío excesivos; o químicos, que pueden dañar los tejidos.
son sensibles a los intercambios de calor entre el cuerpo y el exterior.
Los termorreceptores también son terminaciones nerviosas libres situadas cerca
de la epidermis. Según su rango de respuesta, podemos diferenciar entre los
detectores de calor (30-45 ° C) y de frío (10-35 ° C y por encima de 45 ° C). Estos
receptores se encuentran preferentemente en la piel, aunque también hay
neuronas sensibles a la temperatura en el hipotálamo y en la médula espinal que
contribuyen a regular la temperatura corporal. Los termorreceptores situados en la
piel detectan principalmente cambios súbitos y variaciones de temperatura, y se
adaptan ante estímulos de larga duración.
responden ante los cambios producidos por el movimiento corporal.
Los propioceptores son mecanorreceptores situados en los músculos, los tendones
y los ligamentos, y su actividad se relaciona con las deformaciones mecánicas de
estos tejidos. Si los mecanorreceptores de la piel informaban de contactos con el
medio externo, los propioceptores lo hacen respecto al medio interno. De esta
manera, informan sobre la posición relativa de las diferentes partes del cuerpo y
de su movimiento. Como puede verse con mayor detalle en el capítulo sobre el
sistema motor, existen algunos propioceptores especializados: en la musculatura
esquelética encontramos los husos musculares, que, situados sobre las fibras
musculares, detectan su tasa de estiramiento, y los órganos tendinosos de Golgi,
que se encuentran en el tendón y detectan la fuerza muscular generada a partir de
la tensión ejercida sobre el tendón. A su vez, existen receptores en las
articulaciones que responden en función del ángulo de torsión de la articulación, y
de la dirección y velocidad de los movimientos.
Las vías somatosentoriales
La organización cortical del tacto
Cualidades y psicofísica del tacto
La percepción háptica
Percepción del dolor y la temperatura
Alteraciones del tacto: déficits
sensoriales, el miembro fantasma y las
agnosias táctiles
2. El sistema somatosensorial o los sentidos corporales
Las vías somatosentoriales
Mapa de dermatomas
El mapa de dermatomas varía de unos individuos a otros. Además, existe cierto grado de
sobrelapamiento entre regiones próximas, por lo que el daño en los axones aferentes de uno
de los nervios no produce una pérdida total de sensación en el dermatoma correspondiente.
Aun así, la determinación de los límites de cada dermatoma para un sujeto dado es útil en la
evaluación neurológica, ya que permite determinar la localización de las lesiones espinales y
predecir sus posibles consecuencias.
Ejemplo de neurona somatosensorial
Un corpúsculo de Pacini es una
dendrita encapsulada, el cuerpo
celular de la neurona se encuentra en
el ganglio dorsal y su axón sinapta en
la médula.Representación gráfica de los dermatomas sensoriales de un hombre
adulto. Los números y las letras indican la porción espinal que da su
nombre a cada uno de los nervios (C: cervicales, T: torácicos, L: lumbares,
S: sacros). La cara es inervada por el nervio trigémino.
Los potenciales de acción generados por la activación de los receptores somatosensoriales se transmiten hasta
el sistema nervioso central por los axones aferentes, que alcanzan la médula espinal a través de las raíces
dorsales de los nervios periféricos. Estos axones tienen su soma en los ganglios localizados junto a la zona
dorsal de la columna vertebral.
Las neuronas aferentes del sistema somatosensorial proyectan sus dendritas a los receptores y su axón a la
médula espinal. El área inervada por los axones aferentes de cada uno de los ganglios dorsales se denomina
dermatoma.
Las neuronas aferentes del sistema somatosensorial se diferencian entre sí en función de su grosor, aspecto
que determina la velocidad de transmisión neuronal. Según la velocidad de transmisión, estas fibras se han
agrupado en cuatro clases denominadas Aα, Aβ, Aδ y C.
A incluye las fibras más gruesas y con mayor velocidad de conducción, esencialmente las fibras de los
mecanorreceptores.
C, los axones más finos y lentos, asociados a receptores de dolor y temperatura. La velocidad de transmisión
puede variar desde más de 100 m/s hasta menos de 1 m/s. Por tanto, el tiempo que tarda una sensación en
llegar hasta el sistema nervioso central desde los pies o las manos puede variar desde, aproximadamente, 10
ms, hasta más de 1 s.
Cada tipo de receptor somatosensorial está asociado a un tipo de fibra nerviosa, en lo que suele denominarse
sistema de fibra-receptor.
Ejemplo de fibras de tipo A
Los mecanorreceptores poseen fibras de tipo A, es decir, gruesas y rápidas. La rápida transmisión de su
respuesta nerviosa es una de las razones de nuestra alta sensibilidad cutánea.
Los axones aferentes del sistema somatosensorial transmiten información al cerebro a través de las vías
neurales somatosensoriales, que se encuentran en la sustancia blanca de la médula espinal. Estos axones están
agrupados en dos haces distintos según su función: un haz transmite la actividad de los receptores implicados
en el tacto y la propiocepción, y el otro, la de aquellos implicados en las sensaciones de dolor y temperatura.
Las fibras que provienen de los receptores del tacto y la propiocepción discurren por la vía posterior-lemnisco
medial, o vía de las columnas dorsales. Cuando estos axones alcanzan la médula espinal, algunos de ellos se
bifurcan en ramas ascendentes y descendentes que sinaptan en algunos de los segmentos espinales
inmediatamente superiores o inferiores. Estas sinapsis en los segmentos próximos están implicadas en el
control de algunos reflejos. La mayoría de los axones, sin embargo, continúan a lo largo de la médula espinal
para realizar una sinapsis en los núcleos grácil y cuneiforme de las columnas dorsales de la médula, en la base
del tronco cerebral.
La organización de los axones en la vía posterior-lemnisco medial sigue una organización topográfica: los
axones que provienen de los miembros inferiores del cuerpo ocupan la parte medial de la médula (tracto
grácil), mientras que los que provienen de los miembros superiores, el tronco y el cuello ocupan la parte lateral
(tracto cuneiforme).
Las neuronas que parten de los núcleos grácil y cuneiforme decusan al lado contralateral y proyectan sus axones
al núcleo ventral posterolateral del tálamo, formando el tracto del lemnisco medial.
Tras una sinapsis en el tálamo, esta vía continúa hasta la corteza somatosensorial primaria.
Citológicamente, las neuronas que forman esta vía se caracterizan por ser fibras gruesas y muy mielinizadas, lo
que permite que la transmisión nerviosa sea rápida.
Las fibras que provienen de los receptores de dolor y temperatura discurren por la vía anterolateral. Las fibras
sensoriales de este haz siguen el mismo camino que la vía posterior-lemnisco medial pero, una vez alcanzan la
médula espinal, estas fibras ascienden a través de una región más central de la médula, la sustancia gelatinosa.
Las neuronas, entonces, decusan a la otra mitad lateral de la médula, formando el haz espinotalámico, aunque
finalmente llegan a juntarse con la vía posterior-lemnisco medial en el lemnisco medio, y terminan también en
el núcleo ventral posterolateral del tálamo.
Citológicamente, las neuronas que forman esta vía se caracterizan por ser finas y no mielinizadas de tipo C.
Los receptores somatosensoriales de la cara no alcanzan la médula espinal, sino que envían sus axones a través
del nervio trigémino (V).
Los axones de los receptores somatosensoriales de la cara penetran en el cerebro a la altura de la protuberancia
y, tras una sinapsis en el núcleo sensorial del nervio trigémino en el bulbo, se dirigen hacia el tálamo (núcleo
ventral posteromedial).
Esta vía mantiene la distinción entre fibras de conducción rápida y lenta que se ha descrito para el resto del
sistema somatosensorial. Estas peculiaridades en el modo como se recoge la actividad de los receptores
cutáneos y propioceptivos son importantes en la evaluación de los daños que afectan a estas vías.
3. El sistema somatosensorial o los sentidos corporales
Las vías somatosentoriales
La organización cortical del tacto
Cualidades y psicofísica del tacto
La percepción háptica
Material no evaluable
Percepción del dolor y la temperatura
Alteraciones del tacto: déficits sensoriales, el miembro fantasma y las
agnosias táctiles
Antes de alcanzar la corteza somatosensorial, los haces de fibras aferentes somatosensoriales
convergen en el complejo ventral posterior (VP) del tálamo. Éste consta de dos núcleos diferenciados
denominados medial y lateral. El núcleo ventral posterolateral (VPL) recibe proyecciones desde el
lemnisco medial y la división espinotalámica, es decir, la información somestésica del cuerpo. El
núcleo ventral posteromedial (VPM) recibe proyecciones del lemnisco trigeminal y, por tanto, la
información somestésica de la cara.
El área cortical que recibe la actividad de las vías periféricas somatosensoriales, después de la sinapsis
en el tálamo, es conocido como córtex somatosensorial.
Los haces que alcanzan el córtex somatosensorial sinaptan fundamentalmente en su capa IV. La
corteza somatosensorial está, a su vez, subdividida en áreas primarias y secundarias. Las áreas
primarias son aquellas sobre las que sinaptan los haces que provienen del núcleo ventrobasal del
tálamo. Estas áreas se corresponden con las áreas 1 a 3 del mapa de Brodmann y se denominan áreas
SI. Las áreas secundarias, que reciben axones de neuronas situadas en las áreas primarias, son las
áreas SII (40 de Brodmann) y de asociación somestésica (5 y 7 de Brodmann) que pueden verse en la
figura siguiente. Es importante señalar que el área SI tiene proyecciones a las áreas motoras
adyacentes (área 4 del mapa de Brodmann).
Complejo ventral posterior del tálamo y proyecciones corticales
Área somatosensorial primaria Área somatosensorial secundaria
Según se puede ver en la figura siguiente, podemos dividir el área SI en cuatro zonas diferentes
en función de las fibras somatosensoriales que envían impulsos a esa zona, concretamente
táctiles (fibras rápidas en el área 1 y lentas en el área 3b), propioceptivas (área 3a) y de tendones
y articulaciones (área 2).
Proyecciones desde el tálamo a cada zona del área
somatosensorial primaria. Se muestran también las áreas
somatosensoriales secundarias
Además, las proyecciones de las diferentes partes del cuerpo aparecen reflejadas en partes discretas de estas
áreas, de modo que es posible establecer varios mapas somatotópicos, o esquemas de correspondencia, entre
partes del aparato corporal y zonas discretas de SI (Kaas, Nelson, Sur, Lin y Merzenich, 1979).
Si reprodujéramos la superficie corporal en función del área que ocupan sus proyecciones somatosensoriales en
el córtex SI, nos encontraríamos con una figura humana distorsionada, como la presentada en la figura, y que
denominamos homúnculo sensorial.
Los mapas corticales somatosensoriales, u homúnculo sensorial, no representan el cuerpo en proporción real.
Las zonas con mayor representación cortical son aquellas partes del cuerpo que desempeñan un papel
fundamental en la discriminación táctil y de las que se debe tener información sensorial precisa. La cantidad de
corteza destinada a una determinada parte del cuerpo se relaciona con la cantidad de aferencias sensoriales que
llegan de aquella zona.
Por esta razón, las áreas magnificadas en el córtex SI son aquellas que muestran una mayor sensibilidad en las
pruebas psicofísicas, así como una mayor concentración de receptores cutáneos en la piel.
El homúnculo sensorial y la organización somatotópica
La organización cortical del sistema
somatosensorial está cruzada lateralmente
respecto al aparato corporal.
Las fibras aferentes del sistema
somatosensorial realizan una decusación en
la médula espinal, pasando al lado
contralateral a su entrada en ella. Así, las
áreas SI de los dos hemisferios cerebrales
contienen la actividad producida en el lado
contrario del cuerpo.
El procesamiento somatosensorial, al igual que ocurría para el resto de los sistemas perceptivos, no acaba en las proyecciones que alcanzan la
corteza somatosensorial primaria.
El análisis de las propiedades complejas, tanto del propio cuerpo, como de los objetos en contacto con él, necesita de la integración de la actividad
de múltiples receptores, de diferente tipo, y en distintas localizaciones, en la forma de una dinámica de integración espaciotemporal. En este
proceso de integración participan muchas más áreas de la corteza cerebral.
Estos procesos complejos de integración los encontramos ya en el córtex somatosensorial secundario (SII) y en otras áreas como la corteza
parietal posterior (CPP) o la ínsula. La complejidad en aumento de estos procesos comienza con la localización espaciotemporal de la estimulación
y la detección de movimiento y velocidad, que es el trabajo de las zonas primarias del córtex somatosensorial. Posteriormente, estas áreas SI y SII
proyectan hacia la corteza parietal posterior (CPP), donde las respuestas somatosensoriales se integran con otros tipos de información sensorial.
Dichas áreas poseen un papel capital en el control del movimiento guiado sensorialmente. Concretamente, el área 5 integra información
somatosensorial con información propioceptiva, mientras que el área 7 integra la información somatosensorial con la información visual. Se ha
demostrado que el área CPP está implicada en el control del movimiento guiado sensorialmente, tanto táctil como visualmente.
El tacto dinámico
Ver última página
¿Tacto para el reconocimiento
y tacto para la acción? La
posibilidad de una división
percepción-acción en el
sistema somatosensorial
Ver ultima página
4. El sistema somatosensorial o los sentidos corporales
Las vías somatosentoriales La organización cortical del tacto
Cualidades y psicofísica del tacto
Material no evaluable
La percepción háptica
No evaluable
Percepción del dolor y la temperatura
Alteraciones del tacto: déficits sensoriales, el miembro fantasma y las
agnosias táctiles
Material no evaluable.
¿Cómo podemos evaluar las capacidades sensitivas del sistema sensorial
en el nivel periférico, en la superficie corporal?
- estas capacidades son evaluables por medio de varias técnicas
fisiológicas (evaluación del grosor de la piel, de las características y
densidad de los receptores, velocidad de conducción, etc.), lo que ha dado
lugar al conocimiento que poseemos acerca de los diferentes tipos de
receptores.
-mediante un análisis en el nivel conductual por medio de pruebas
psicofísicas. Este análisis nos permite conocer cuál es la capacidad
sensorial en diferentes partes de la piel. Para poder estimar la sensibilidad
de la piel, utilizamos medidas de agudeza espacial, como la prueba de
umbral de dos puntos (Weinstein, 1969) o pruebas de sensibilidad a la
presión, a la temperatura, a la vibración, etc. (Sherrick y Cholewiak, 1986).
La prueba del umbral de dos puntos es una prueba psicofísica que
consiste en determinar la distancia mínima que debe haber entre dos
puntos que entran en contacto con la piel simultáneamente para que
ambos se distingan como puntos diferentes. El aparato utilizado para
realizar esta prueba se denomina aestesiómetro.
El resultado más interesante obtenido con esta prueba es que la distancia
mínima necesaria para que los dos puntos sean distinguibles varía en las
distintas zonas de la superficie corporal, y mantiene una relación directa
con el área de proyección cortical de dicha zona en el córtex
somatosensorial primario.
Junto al umbral de dos puntos, el siguiente umbral más ampliamente
utilizado en la evaluación psicofísica de la sensibilidad táctil es el umbral
de presión. El umbral de presión se determina mediante el
establecimiento de la intensidad mínima de presión que es detectada en
una determinada zona de la piel.
El aparato utilizado para realizar la prueba del umbral de presiónson los
llamados monofilamentos de Weinstein. Éstos son unos filamentos de
Nylon de diferentes diámetros que permiten controlar el nivel de presión
ejercida. Para determinar el valor umbral, se van presentando los
diferentes monofilamentos de manera consecutiva, siguiendo por tanto el
método de límites para cálculo de umbrales de la psicofísica. Los valores
medios que se han encontrado, mediante este procedimiento
experimental, en el análisis de las manos se describen en esta tabla.
Las tareas psicofísicas que permiten la evaluación del tacto se han
extendido también al análisis del sistema propioceptivo. En este caso el
objetivo es evaluar nuestra capacidad para la detección del movimiento de
nuestros miembros.
Según Lillo (1993), los hallazgos más importantes en este campo pueden
resumirse en cinco principios. Éstos son:
1) La detección del movimiento requiere menos desplazamiento que la
detección de su dirección.
2) El incremento de la velocidad de desplazamiento facilita su detección.
3) Las articulaciones más próximas al eje corporal tienen umbrales de
detección del movimiento más pequeños (bajos) que las más alejadas.
4) Si estos valores se calculan para el desplazamiento del segmento más
alejado de la extremidad, los valores de umbral se invierten.
5) Si en lugar de estimar el movimiento del miembro se estima el cambio
en la longitud de los músculos antagonistas de la articulación, se
encuentra que la variación relativa de longitud necesaria para la detección
de movimiento es la misma para las distintas articulaciones.
La lectura general de estos resultados sugiere que el funcionamiento
cinestésico no hace referencia a un espacio exterior absoluto, sino que se
basa en el espacio corporal. Así, parece que la percepción del movimiento
reside en la detección de cambios pertenecientes exclusivamente a la
dinámica de estados internos del organismo.
Dolor
Temperatura
Definición: la percepción de dolor como un mecanismo de
alarma que detecta situaciones anormales potencialmente
nocivas y, más concretamente, capaces de producir
diferentes formas de daño en los tejidos corporales.
Los estímulos capaces de producir estos
daños, que son, por tanto, detectados
por el sistema de percepción del dolor,
son de varios tipos:
Los receptores del dolor
Los nociceptores están repartidos por
todo el cuerpo, no se encuentran sólo en la
piel, sino también en los órganos, excepto en
el cerebro.
Los nociceptores consisten en terminaciones
nerviosas libres de neuronas sensoriales con
el cuerpo en los ganglios de la raíz dorsal.
Estos nociceptores se pueden clasificar,
según el tipo de estímulo al que responden,
en: mecánicos, térmicos, químicos y
polimodales.
En el nivel fisiológico, la actuación de los
nociceptores se relaciona con la liberación de
sustancias químicas en respuesta al daño o a
la inflamación de los tejidos. Son estas
sustancias químicas las que provocan la
actividad de los nociceptores.
Las fibras asociadas a los receptores de
las vías somatosensoriales pueden ser
de dos tipos: fibras Aδ y fibras C.
Mecanismos fisiológicos de la respuesta de dolor
Dolor referido
Un fenómeno específico en la percepción del dolor es el
llamado dolor referido. Éste consiste en la percepción de
dolor en el nivel cutáneo aun cuando éste ha sido
provocado por la activación de nociceptores en las vísceras.
Este fenómeno se debe a que las fibras de los nociceptores
viscerales entran en la médula espinal por el mismo camino
que las fibras provenientes de los nociceptores cutáneos. El
ejemplo clásico de este fenómeno es la angina de pecho: el
paciente localiza el dolor proveniente del corazón en la
parte superior de la pared torácica izquierda y en el brazo
izquierdo.
Químicos: pH
excesivo,
determinados
iones o sustancias
neuroactivas, etc.
Térmicos:
calor y frío
extremos.
Mecánicos:
presión
excesiva.
Las fibras Aδ están asociadas
a nociceptores mecánicos,
térmicos y químicos. Su
activación se asocia al dolor
primario (sensación
punzante, viva, muy definida y
con una localización precisa)
Las fibras C están asociadas a
nociceptores polimodales, que son
activados por distintos tipos de
estímulos nocivos. Su activación se
asocia a dolor secundario
(difuso, persistente y escasamente
localizado).
Representación gráfica de la implementación y curso
temporal de los dolores primario y secundario
Otra característica específica del dolor es su carácter
variable, tanto en términos de intensidad y localización,
como de duración. Podemos afirmar que, ante un mismo
patrón de actividad de los nociceptores, la percepción
dolorosa varía en función de aspectos contextuales como la
actividad del resto del sistema somatosensorial y el estado
cognitivo general.
La variabilidad del sistema de dolor permite unas formas de
regulación inexistentes en otros sistemas sensoriales. Se
suele hablar de dos formas esenciales de regulación del
dolor: la regulación aferente y la regulación descendente.
La regulación aferente La regulación descendente
La regulación aferente se produce
por la interacción, en el nivel
medular, de los aferentes de los
mecanorreceptores y de los
nociceptores, que resulta en la
modulación de las señales
dolorosas transmitidas al cerebro.
La regulación descendente se
produce por la intervención de los
centros superiores del sistema
nervioso central, que modulan la
respuesta al dolor en los múltiples
niveles implicados (tanto en la
médula como en el hipotálamo, la
amígdala o la corteza).
El patrón clásico de la regulación aferente es la llamada
hiperalgesia, en la que la actividad del tacto suave provoca
dolor. Esta regulación puede ocurrir también en el sentido
contrario, cuando la actividad de los mecanorreceptores
provoca una reducción del dolor. Por esta razón, el
masajear la zona dolorida, como se hace a menudo tras un
golpe leve, produce una reducción de la sensación de dolor.
La teoría del control de puerta
Intenta explicar estos dos fenómenos.
propone que las fibras de proyección de los haces
espinotalámicos son excitadas tanto por axones de gran
diámetro provenientes de los mecanorreceptores, como por
axones no mielinizados y de menor diámetro, provenientes
de los nociceptores, e inhibidos, a su vez, por interneuronas.
De esta manera, y como se muestra en la figura, la actividad
de la neurona ascendente está modulada por los
mecanorreceptores junto a los nociceptores. Puesto que, a
su vez, la interneurona recibe una influencia inhibitoria de
las fibras no mielinizadas y una influencia excitatoria de las
fibras mielinizadas, el resultado es que la actividad de las
fibras de dolor excita la vía de proyección, mientras que una
actividad concurrente de las fibras mecanorreceptivas
consigue reducir la activación por medio de la interneurona.
CENTROS DE MODULACIÓN DEL DOLOR
Aunque se han propuesto varios centros de
modulación del dolor, destaca entre ellos la llamada
sustancia gris periacueductal, que es la
sustancia gris que rodea el acueducto cerebral en el
mesencéfalo. Se ha demostrado la relación de esta
localización con distintas estructuras implicadas en la
modulación del tono emocional. Ella misma, a su vez,
contiene células cuyos axones sinaptan en los
llamados núcleos del rafe, localizados en el tronco
del encéfalo. Estas neuronas del bulbo raquídeo
parecen deprimir de manera efectiva la actividad de
las proyecciones nociceptoras que provienen de las
astas posteriores de la médula espinal.
-Se considera que la percepción de la temperatura constituye un subsistema independiente dentro de la
organización del sistema somatosensorial.
-La vital importancia de la temperatura depende del hecho de que todas las células del cuerpo son sensibles a
ella, ya que puede afectar a su funcionamiento químico.
-Aunque todas las neuronas son sensibles a la temperatura, no todas son termorreceptores. Existen algunas
neuronas que son exquisitamente sensibles a la temperatura y pueden responder ante diferencias de sólo 0,01
° C. Podemos diferenciar estos termorreceptores en dos tipos: los detectores de calor (responden al rango 30-
45 ° C) y de frío (responden al rango 10-35 ° C y por encima de 45 ° C). Todos ellos están localizados
preferentemente en la piel. También hay neuronas sensibles a la temperatura en el hipotálamo y en la médula
espinal que contribuyen a regular la temperatura corporal.
-Los termorreceptores en la piel detectan principalmente cambios súbitos y variaciones de temperatura, y se
adaptan durante los estímulos de larga duración.
-El comportamiento de los termorreceptores explica los peculiares resultados de la experiencia con los dos
recipientes de agua que sugerimos anteriormente. Las proyecciones al sistema nervioso central, que son
virtualmente idénticas a las vías de los nociceptores, se producen por medio de fibras Aδ y C: ambas en el caso
de los receptores de frío y sólo las C para los receptores de calor.
-Ejemplo: La temperatura del cerebro: Un caso que demuestra la importancia de la temperatura es el del
cerebro, que, por su complejidad, requiere una temperatura más estable que otras partes del cuerpo, de tal
manera que es vital que se mantenga alrededor de los 37° y no supere los 40,5° (Stevens, 1991).
5. La percepción háptica depende en gran medida de la realización de movimientos de exploración, es decir, que es
un proceso de carácter perceptivo-motor. ¿Cuál es el modo como la información de nuestros propios movimientos,
esto es, la información propioceptiva, es capaz de informar sobre objetos externos?
La respuesta actual la encontramos en el estudio de las formas más complejas del tacto, en el ámbito que
denominamos del tacto dinámico.
El tacto dinámico trabaja en el análisis de nuestros modos de estimar cualidades que no son accesibles
directamente, ya que son propiedades relacionales y no cualidades primarias del objeto.
La propiedad que hemos de extraer sólo aparece cuando movemos el objeto, y es la fuerza que utilizamos para
moverlo la que nos sirve de vara de medida. Mientras que las torsiones de los miembros del cuerpo y los
movimientos del objeto varían temporalmente y también en función de la forma de sopesar, podemos comprobar
que hay elementos (como el tensor de inercia) que se mantienen constantes para ese objeto y que están presentes
en todos y cada uno de esos movimientos y torsiones. Determinando cuáles son estos elementos constantes,
podemos realizar una descripción formal de la percepción háptica en la que el movimiento intencional pasa a ser el
elemento imprescindible en el acto perceptivo. El tacto dinámico, en la forma descrita, da acceso a propiedades
como peso, longitud, anchura, volumen, forma y orientación de los objetos.
La línea de investigación de Turvey ha mostrado que la percepción de nuestro propio cuerpo está también afectada
por la determinación de propiedades invariantes y relacionales. Así, las técnicas experimentales consistentes en
variar las características del tensor de inercia añadiendo pesos al objeto en posiciones variables han mostrado que
la estimación de nuestra capacidad de alcance y del tamaño de las extremidades, es decir, nuestra imagen
corporal, está guiada por el tacto dinámico: si el peso se coloca en una posición más alejada, incrementando así los
valores del tensor de inercia, la estimación de la longitud del objeto se incrementará, aunque el objeto sea el
mismo, y se producirá, a su vez, la ilusión de que la mano puede alcanzar una distancia mayor.
La estructura fisiológica implicada en la detección de estas características reside, principalmente, en los
propioceptores musculares y articulares, por lo que son éstos los responsables de la percepción del espacio
tridimensional y el movimiento. La información sobre el esfuerzo muscular dará cuenta, principalmente, de otras
características o propiedades de los objetos (por ejemplo, su masa). Como mencionamos con anterioridad, el
funcionamiento de este subsistema es una integración de la información de deformación de la piel, de la posición
articular y, al tiempo, del esfuerzo y la situación muscular, que es información no espacial. Su estrategia se basará
en el establecimiento de invariantes.
Percepción del propio cuerpo por tacto dinámico
El tacto dinámico
En la actualidad, y a raíz del modelo de Goodale y Milner (Goodale y Milner, 1992; Milner y Goodale, 1995), muchos de los
procesos complejos de la visión se entienden como el resultado de una división, en la corteza visual, entre una vía dedicada a
procesar la información visual necesaria para la percepción y otra dedicada a procesar la información visual necesaria para el
control de la acción. Respecto al sistema somatosensorial, existen ya algunas propuestas que sugieren una distinción similar entre
el tacto ligado al reconocimiento y el tacto ligado a la acción (Dijkerman y de Haan, 2007).
En primer lugar, y en el nivel neurológico, se ha demostrado la existencia de una vía de actividad neural que trabaja con
información somatosensorial, que va desde la corteza SI hasta la CPP, pasando por la corteza SII. Esta primera vía estaría
relacionada con la percepción y el control de la acción motora. Los daños en esta vía tendrían como efecto alteraciones de la
praxis motora y de aquellos aspectos del reconocimiento táctil en los que las coordenadas espaciotemporales son
imprescindibles. En segundo lugar, hay datos que sugieren una segunda vía que va a la ínsula desde SII. Esta vía estaría
principalmente implicada en el reconocimiento de objetos por medio del tacto, junto a la percepción consciente del nuestro
propio cuerpo, la denominada imagen corporal. Los daños en esta vía producirían formas de agnosia táctil, o alteraciones en el
reconocimiento de objetos, y anosognosias, o alteraciones en el reconocimiento del propio cuerpo.
Sin embargo, el hecho de que el tacto trabaje necesariamente realizando operaciones motoras de exploración, que son las que
producen la información somatosensorial que nos permite extraer las propiedades de los objetos, lleva aparejada la imposibilidad
práctica de que ambos sistemas trabajen de manera modular independiente (Travieso, Aivar y Gomila, 2007).
La percepción háptica
Material no evaluable
En el plano perceptivo, es fundamental tener en cuenta que la mayor
parte de la actividad del tacto requiere la implicación de los sistemas
cutáneo y propioceptivo y, además, se produce en un contexto de
palpación o actividad intencional de tocar.
Conforme avanzamos desde el ámbito de la psicofísica hacia el análisis
de las formas más complejas del tacto, como el reconocimiento de
patrones tridimensionales u objetos sólidos, podemos observar que el
papel del acto motor, la exploración, va tomando una mayor relevancia
en el tacto. Denominamos este tipo de actividad integrada del tacto
como sistema háptico.
La percepción háptica de cualidades tan importantes como el peso, la
forma o el tamaño de un objeto sólo puede entenderse, por tanto,
considerando la globalidad del sistema háptico y la complejidad
espacio-temporal de los patrones tridimensionales de exploración. En
este ámbito, los trabajos experimentales ya no vinculan los
rendimientos en las tareas perceptivas a la agudeza del sistema
sensorial, sino a la efectividad de los movimientos de exploración
realizados por los perceptores durante las pruebas (Loomis y Lederman,
1986; Heller y Schiff, 1991). La descripción más extendida de dichos
procedimientos de exploración de los objetos tridimensionales ha sido
realizada por Lederman y Klatzky (1987), y muestra la utilidad de cada
patrón de exploración para la extracción de ciertos tipos de información
acerca del objeto.
¿Tacto para el reconocimiento
y tacto para la acción? La
posibilidad de una división
percepción-acción en el
sistema somatosensorial
Ver ultima página
Procedimientos de exploración háptica
Las alteraciones en el sistema somatosensorial, como ocurre en el caso de otros sistemas sensoriales,
pueden ser agrupadas en función de si los daños se producen en las vías periféricas o si son
alteraciones en el trabajo del sistema nervioso central.
En el caso de los daños periféricos, lo que encontramos son patologías que se caracterizan por una
alteración de la conducción nerviosa en el nivel periférico.
Las patologías más habituales se engloban en las llamadas neuropatías periféricas, aunque también se
englobarían en esta categoría otros daños locales como el síndrome del túnel carpiano. Estas
patologías son el resultado de distintos factores, como una pérdida de mielina, en el caso en la
neuropatía periférica (Travieso y Lederman, 2007), o un síndrome de presión o sección de los nervios
periféricos, como ocurre en el caso del síndrome del túnel carpiano de la mano.
Las neuropatías periféricas y el síndrome del túnel carpiano son alteraciones que devienen
normalmente en aumentos significativos de los umbrales sensoriales, es decir, en una pérdida de
sensibilidad.
La distribución espacial de la pérdida de sensibilidad puede ser local, es decir, centrada en una zona
del cuerpo, en algunos casos, o generalizada espacialmente, en cuyo caso muestra una evolución
distal-proximal. Además, este aumento del umbral sensorial no afecta por igual a todas las
propiedades de los estímulos detectables clínicamente por medio de pruebas psicofísicas. Por
ejemplo, es importante señalar que, en estos casos, suelen ser menores las alteraciones en el sistema
propioceptivo (Travieso y Lederman, 2007).
Las alteraciones centrales son aquellas que implican a las áreas somatosensoriales de la corteza y a
sus vías de conexión.
Es importante recordar la división funcional propuesta anteriormente en dos vías separadas del tacto,
una para el reconocimiento y otra para la acción. Así, algunas alteraciones centrales, como las
agnosias táctiles y las alteraciones de la imagen corporal, estarían asociadas a alteraciones de la vía
del reconocimiento, mientras que otras patologías, como las distorsiones del esquema corporal y las
apraxias, se relacionarían con lesiones de la vía reguladora de la acción.
La agnosia táctil se define como un síndrome neuropsicológico que produce alteraciones en el
reconocimiento háptico de los objetos. Aunque en la mayor parte de los casos estas alteraciones se
vinculan a daños en la corteza parietal derecha, su interpretación, en términos de una participación de
la denominada vía del reconocimiento, proviene de evidencias de pacientes con agnosia táctil fruto de
lesiones en la ínsula (Bohlhalter, Fretz y Weder, 2002). En el caso de las alteraciones de la imagen
corporal, encontramos algunos síndromes diferentes, como la anosognosia, o negación de partes del
cuerpo, y el denominado numbsense o síndrome del cuerpo dormido . Estas alteraciones están
relacionadas con la imagen corporal, pero no afectan al esquema corporal, es decir, el trabajo
sensoriomotor no está afectado. Dado que todos estos síndromes parecen estar relacionados con la
misma vía, la del reconocimiento (Paillard, 1999), parece posible separarla como vía independiente de
procesamiento.
Las alteraciones sensoriomotoras, denominadas apraxias, se definen como alteraciones en el control
de las acciones, acciones que se ejecutan con objetos cuyas propiedades sí son percibidas de manera
correcta. Se suelen agrupar estas alteraciones con las denominadas alteraciones del esquema
corporal, que son casos en los que los pacientes comenten errores en la localización y realización de
movimientos de las extremidades y en la realización de algunos movimientos coordinados. Como estas
alteraciones se asocian a daños en la vía parietal, se interpretan como ligadas a la vía de la acción en el
sistema somatosensorial (Dijkerman y de Haan, 2007).
Alteraciones del tacto: déficits sensoriales, el miembro fantasma y
las agnosias táctiles
Material no evaluable.
El sistema somatosensorial o los sentidos corporales