
Recomendados
Más contenido relacionado
Similar a Introducción a la automatización y control de sistemas
Similar a Introducción a la automatización y control de sistemas (20)
Último
Último (20)
Introducción a la automatización y control de sistemas
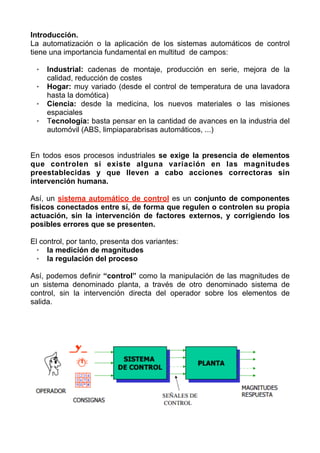
- 1. Introducción. La automatización o la aplicación de los sistemas automáticos de control tiene una importancia fundamental en multitud de campos: • Industrial: cadenas de montaje, producción en serie, mejora de la calidad, reducción de costes • Hogar: muy variado (desde el control de temperatura de una lavadora hasta la domótica) • Ciencia: desde la medicina, los nuevos materiales o las misiones espaciales • Tecnología: basta pensar en la cantidad de avances en la industria del automóvil (ABS, limpiaparabrisas automáticos, ...) En todos esos procesos industriales se exige la presencia de elementos que controlen si existe alguna variación en las magnitudes preestablecidas y que lleven a cabo acciones correctoras sin intervención humana. Así, un sistema automático de control es un conjunto de componentes físicos conectados entre sí, de forma que regulen o controlen su propia actuación, sin la intervención de factores externos, y corrigiendo los posibles errores que se presenten. El control, por tanto, presenta dos variantes: • la medición de magnitudes • la regulación del proceso Así, podemos definir “control” como la manipulación de las magnitudes de un sistema denominado planta, a través de otro denominado sistema de control, sin la intervención directa del operador sobre los elementos de salida.
- 2. Los términos básicos que se utilizan en automatización son: • Planta: el sistema que se quiere controlar • Proceso: la secuencia de operaciones que se realizan en la planta • Sistema: el conjunto de elementos que llevan a cabo el proceso • Servomecanismo: cada uno de los elementos del sistema Las magnitudes que se someten a vigilancia y/o control durante el proceso se conocen como variables del sistema. A la hora de estudiar y diseñar dichos sistemas lo que nos interesa es conocer cual es su comportamiento, independientemente de cómo estén construidos; así, se definen los siguientes conceptos: • Entrada: Excitación que se aplica al sistema desde una fuente de energía interna con el fin de provocar una respuesta. • Salida: Respuesta que proporciona el sistema. • Perturbación: Señales no deseadas que influyen de manera negativa en el funcionamiento del sistema. Los distintos servomecanismos que pueden estar presentes en un sistema se denominan, de forma genérica: • Sensor o captador: que realiza la medida de una magnitud • Transductor: para transformar la magnitud medida en otro tipo de magnitud • Amplificador: usado en ocasiones para tener una señal más potente • Actuador: ejerce las acciones correctivas Representación sistemática 1.- Para representar procesos controlados automáticamente se utilizan diagramas de bloques formados por rectángulos que indican la acción realizada y flechas que indican la interacción y cómo afectan unos procesos a otros. 2.- Cuando se realiza una comparación, aunque sea ficticia, se dibuja un círculo que indica la comparación realizada. Con este modo de representación aparece la primera clasificación de los sistemas de control en dos grandes grupos, dependiendo de que haya o no comparación con un valor de referencia (realimentación):
- 3. 1- Sistemas de lazo abierto: Son aquellos en los que la variable de salida (variable controlada) no tiene efecto sobre la acción de control (variable de control). Características • No se compara la salida del sistema con el valor deseado de la salida del sistema (referencia). • Para cada entrada de referencia le corresponde una condición de operación fijada. • La exactitud de la salida del sistema depende de la calibración del controlador. • En presencia de perturbaciones estos sistemas de control no cumplen su función adecuadamente. La función del transductor es modificar o adaptar la señal de entrada, para que pueda ser procesada convenientemente por los elementos que constituyen el sistema de control (es decir, para que el sistema sea capaz de interpretarla) El accionador o actuador, modifica la entrada del sistema comandado por la salida del transductor. Otra característica importante de los sistemas de lazo abierto es que dependen de la variable tiempo y la salida es independiente de la entrada. 2- Sistemas de lazo cerrado Son aquellos en los que la señal de salida del sistema (variable controlada) tiene efecto directo sobre la acción de control (variable de control). Se dice entonces que existe un “control retroalimentado” o “realimentación”*. Características • Si se compara la salida del sistema con el valor deseado (salida de referencia). • A la entrada de referencia le pueden corresponder más de una condición de operación fijada. • La exactitud de la salida del sistema depende de la calibración del controlador y de la señal de error que retroalimenta el sistema. • En presencia de perturbaciones estos sistemas de control si cumplen su función adecuadamente.
- 4. Respecto a las magnitudes que se controlan y regulan, tenemos: • Entrada de mando: cualquier acción externa que condiciona el funcionamiento de la planta (por ejemplo la puesta en marcha) • Señal de referencia: el valor que se quiere mantener • Señal controlada o Salida: el valor real que se obtiene • Señal actuante o Error: la diferencia entre la señal de referencia y la salida • Perturbación: todo lo que influye sobre el proceso debido a una acción no deseada La realimentación es la propiedad de un sistema de lazo cerrado por la cual la salida se compara con la entrada del sistema con el fin de corregir posibles desviaciones en el funcionamiento. El sistema se retroalimenta mediante un captador conectado a la salida del sistema. Este captador envía una señal al comparador, el cual la compara con la señal de referencia (la que sale del transductor), generando, si fuera necesario, una señal de error. La señal de referencia (salida del transductor = Entrada = salida deseada) se compara con la señal de salida medida por el captador, con lo que se genera en el comparador la siguiente señal de error: e(t) = r(t) – b(t) donde e(t) es la señal de error, r(t) la señal de referencia y b(t) la variable realimentada. Si dicho error se produce, la señal de salida del comparador actúa sobre el regulador que envía una orden al accionador para que la señal de salida del proceso sea la correcta. Este regulador es considerado “el cerebro” del bucle/lazo y es un componente que debe ser diseñado con gran precisión. Si la señal de error fuese nula, entonces la salida tendría exactamente el valor previsto.
- 5. Resumiendo conceptos: El captador se encarga de recoger la información de salida ( una velocidad, una temperatura por ejemplo) y convertirla en una señal similar a la de referencia con la que se compara ( una tensión). El comparador se encarga de restar las señales de referencia y realimentada del captador, la diferencia es la señal activa o de error que actúa sobre el regulador El regulador o controlador es el dispositivo que se encarga de recoger la señal activa (procedente del comparador ) y actuar sobre la planta o proceso (parte principal del sistema), para llevar el sistema al estado deseado. Es decir, suministra la señal sobre el sistema para que este actúe según sea necesario. El regulador y comparador pueden estar formado por un mismo elemento (puede ser un regulador, mecánico, eléctrico, hidráulica, neumático etc.) Estabilidad de un sistema. Cualquier perturbación ( cambios en las condiciones externas o internas en el sistema) o variación de la señal de mando, actúa sobre el regulador. El regulador tarda un tiempo en dar la respuesta ante estas variaciones. Si la respuesta es muy rápida provoca una oscilación del sistema. Este tiempo sería el periodo transitorio. Para que el sistema sea estable la oscilación debe desaparecer. Si no desaparece y aumenta con el tiempo el sistema es inestable