Descargar como ODP, PPTX

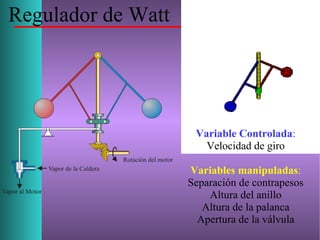
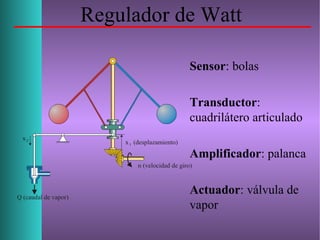
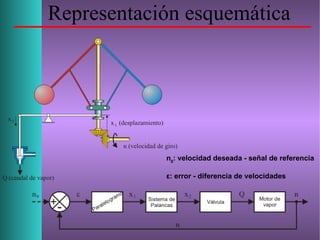
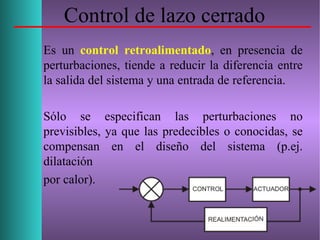
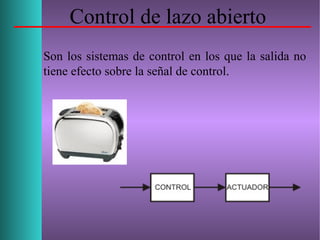
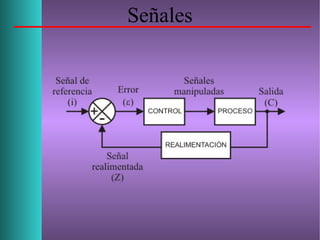
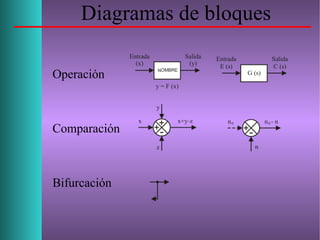
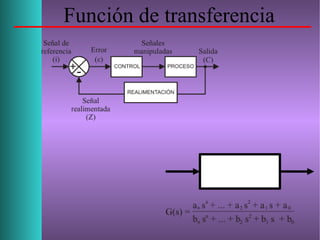
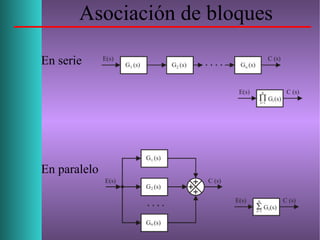
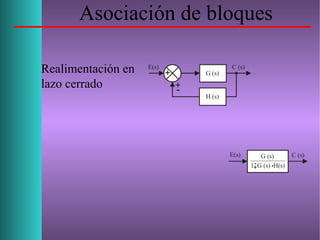
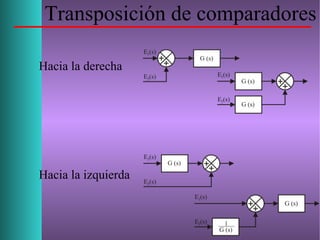
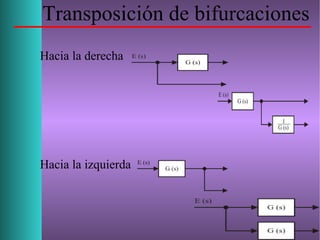
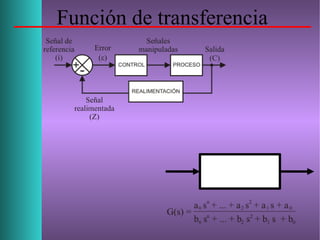
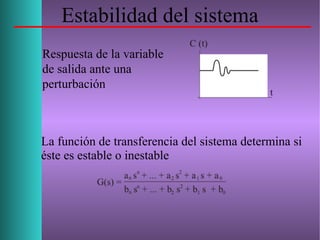
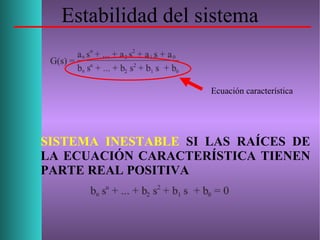
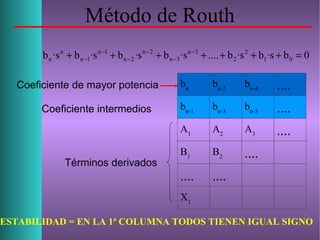
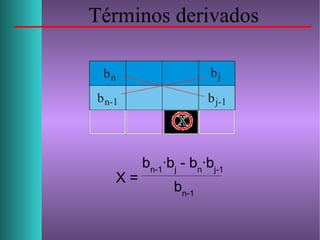


Este documento presenta conceptos básicos de control de sistemas. Define variables controladas y manipuladas, y describe los elementos clave de un sistema de control de lazo cerrado como sensores, transductores, amplificadores y actuadores. También explica conceptos como señales de entrada, referencia y error, así como perturbaciones. Finalmente, introduce ideas sobre representación de sistemas mediante diagramas de bloques y el análisis de estabilidad.











































































































