Antenas, tipos de antenas, diseño basico de una antena y parámetros.pdf
Linea de tiempo
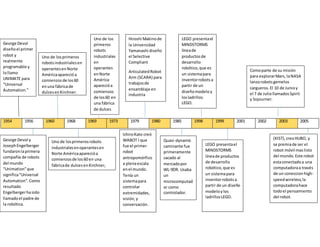
1. 1954 1956 1960 1968 1969 1973 1979 1980 1985 1998 1999 2001 2002 2003 2005
George Devol
diseñoel primer
robot y
realmente
programable y
lollamo
UNIMATE para
“Universal
Automation.”
George Devol y
JosephEngelberger
fundaronlaprimera
compañía de robots
del mundo
“Unimation”que
significa“Universal
Automation”.Como
resultado
Engelbergerhasido
llamadoel padre de
la robótica.
Uno de losprimeros
robotsindustrialesen
operantesenNorte
Américaaparecióa
comienzosde los60
enuna fábricade
dulcesenKirchner,
Ontario.
Uno de losprimerosrobots
industrialesenoperantesen
Norte Américaaparecióa
comienzosde los60 en una
fábricade dulcesenKirchner,
Ontario.
Uno de los
primeros
robots
industriales
en
operantes
enNorte
América
aparecióa
comienzos
de los60 en
una fábrica
de dulces
enKirchner,
Ontario.
IchiroKato creó
WABOT I que
fue el primer
robot
antropomórfico
a plenaescala
enel mundo.
Tenía un
sistemapara
controlar
extremidades,
visión,y
conversación.
Hiroshi Makinode
la Universidad
Yamanashi diseño
el Selective
Compliant
ArticulatedRobot
Arm (SCARA) para
trabajosde
ensamblaje en
industria
Quasi-dynamic
caminante fue
primeramente
sacado al
mercadopor
WL-9DR. Usaba
un
microcomputad
or como
controlador.
LEGO presentael
MINDSTORMS
líneade
productosde
desarrollo
robótico,que es
un sistemapara
inventorrobotsa
partir de un
diseñomodeloy
losladrillos
LEGO.
LEGO presentael
MINDSTORMS
líneade productos
de desarrollo
robótico,que es
un sistemapara
inventorrobotsa
partir de un diseño
modeloylos
ladrillosLEGO.
Comoparte de su misión
para explorarMars, laNASA
lanzorobotsgemelos
cargueros.El 10 de Junioy
el 7 de JuliollamadosSpirit
y Sojourner.
(KIST),creoHUBO, y
se premiade ser el
robot móvil maslisto
del mundo.Este robot
estaconectadoa una
computadoraa través
de un coneccionhigh-
speedwireless;la
computadorahace
todoel pensamiento
del robot.