
Recomendados
Más contenido relacionado
Similar a SimulacionSistemasDinamicos.pptx
Similar a SimulacionSistemasDinamicos.pptx (20)
Último
Último (20)
SimulacionSistemasDinamicos.pptx
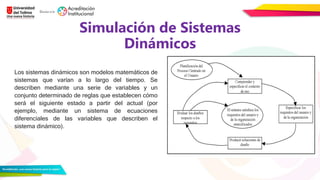
- 1. Simulación de Sistemas Dinámicos Los sistemas dinámicos son modelos matemáticos de sistemas que varían a lo largo del tiempo. Se describen mediante una serie de variables y un conjunto determinado de reglas que establecen cómo será el siguiente estado a partir del actual (por ejemplo, mediante un sistema de ecuaciones diferenciales de las variables que describen el sistema dinámico).
- 2. Los ingenieros y científicos emplean software de simulación por varios motivos: •Si se diseña software de control para dispositivos físicos, y una vez esté disponible el sistema real, es posible reducir el esfuerzo dedicado a pruebas con dichos dispositivos gracias al trabajo previo realizado con los modelos matemáticos. •A menudo es más fácil, más económico o más seguro crear y simular un modelo matemático de un sistema real que crear y probar un prototipo físico. •Si el sistema físico aún no está disponible, es posible modelizarlo con mayor o menor fidelidad como un sistema dinámico, que se podrá simular para explorar diferentes opciones de diseño.
- 3. Fases de Simulación en Sistemas Dinámicos Compilación de modelos La primera fase de la simulación ocurre cuando el modelo del sistema está abierto y usted simula el modelo. En el Editor de Simulink® , haga clic en Ejecutar . La ejecución de la simulación hace que el motor de Simulink invoque el compilador del modelo. El compilador del modelo convierte el modelo en un formato ejecutable, un proceso denominado compilación. En particular, el compilador: •Evalúa las expresiones de parámetros de bloque del modelo •Determina los atributos de la señal •Propaga los atributos de una señal fuente a las entradas de los bloques •Realiza optimizaciones de reducción de bloques. •Aplana la jerarquía del modelo al reemplazar los subsistemas virtuales •Determina el orden de ejecución del bloque •Determina los tiempos de muestra de todos los bloques del modelo.
- 5. Fase de bucle de simulación Una vez que se completa la fase de enlace, la simulación entra en la fase de bucle de simulación. En esta fase, el motor de Simulink calcula sucesivamente los estados y las salidas del sistema a intervalos desde la hora de inicio de la simulación hasta la hora de finalización, utilizando la información proporcionada por el modelo. ->Los puntos de tiempo sucesivos en los que se calculan los estados ->las salidas se denominan pasos de tiempo. ->El tiempo entre pasos se llama tamaño de paso. ->El tamaño del paso depende del tipo de solucionador La fase de bucle de simulación tiene dos subfases: la fase de inicialización del bucle y la fase de iteración del bucle. La fase de inicialización ocurre una vez, al comienzo del ciclo. La fase de iteración se repite una vez por paso de tiempo desde la hora de inicio de la simulación hasta la hora de finalización de la simulación.
- 6. El siguiente diagrama de flujo explica cómo funciona el bucle de simulación donde k indica el contador de pasos principal: Iteración de bucle En cada paso de tiempo, el motor de Simulink: 1.Calcula las salidas del modelo: contiene el modelo en el orden especificado por las listas de ejecución del método Salidas generadas en la fase Enlace. 2.Calcula los estados del modelo: calcula los estados de un modelo invocando un solucionador. (sin estados, discretos, continuos o ambos) 3.Opcionalmente, comprueba las discontinuidades en los estados continuos de los bloques. Se utiliza una técnica llamada detección de cruce por cero para detectar discontinuidades en estados continuos. 4. Calcula el tiempo para el siguiente paso de tiempo.