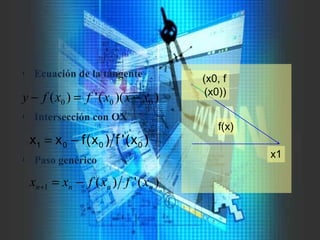
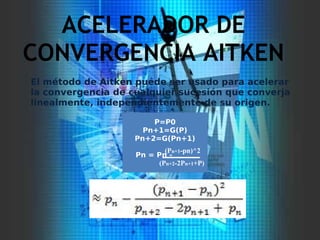
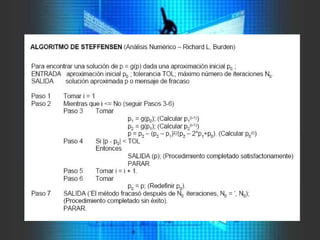
Este documento describe varios métodos iterativos para resolver ecuaciones en una variable. Brevemente describe los métodos de la bisección, regla falsa, punto fijo, Newton-Raphson, secante y Muller, incluyendo sus algoritmos, diagramas de flujo y consideraciones sobre convergencia.
![Teorema de Bolzano
Sea f:A continua
y sean a,b A
con f(a)f(b) < 0.
Entonces, existe
c [a,b] con f(c) = 0.
a
b
f(b
)
f(a
)](https://image.slidesharecdn.com/68806235-metodos-numericos-140414103409-phpapp02/85/68806235-metodos-numericos-4-320.jpg)
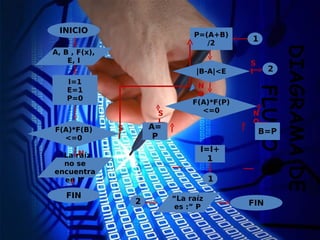
![Algoritmo de Bisección
c =(a+b)/2;
if f(a)*f(c)<=0 %elige [a,c]
b=c;
end
if f(c)*f(b)<=0 %elige [c,b]
a=c;
endTeorema: El método de la bisección
genera una sucesión {xn} que
converge a una raíz de f con
xn- (b-a)/2n. ](https://image.slidesharecdn.com/68806235-metodos-numericos-140414103409-phpapp02/85/68806235-metodos-numericos-5-320.jpg)

![¸ Elegir, entre [a,c] y [c,b],
un intervalo en el que la
función cambie de signo.
¹ Repetir los pasos 2 y 3
hasta conseguir la
precisión deseada.
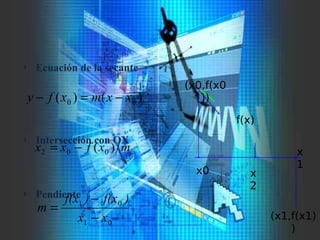
)()( afbf
ab
f(a)ac
−
−
−=
¶ Determinar un intervalo [a,b] tal que
f(a) tiene signo distinto de f(b).
· Hallar el punto c que divide el intervalo
[a,b] en partes proporcionales a f(a) y
f(b). Sea
a
bc](https://image.slidesharecdn.com/68806235-metodos-numericos-140414103409-phpapp02/85/68806235-metodos-numericos-8-320.jpg)



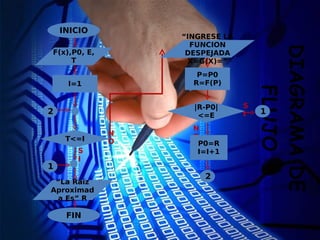
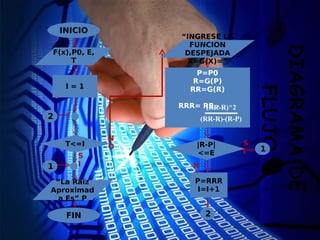
![¶ Transformar la ecuación f(x) = 0 en una ecuación
equivalente de punto fijo: x = g(x).
· Tomar una estimación inicial x0 del punto fijo x* de g [x*
punto fijo de g si g(x*) = x*].
¸ Para k=1, 2, 3, … hasta que converja, iterar xn+1 =
g(xn).
Teorema del punto fijo: Sea g:[a,b] [a,b] continua,
entonces:
a) g posee almenos un punto fijo.
b) Si además g’(x) k<1, x [a,b], entonces el punto fijo es
único y si tomamos x0 [a,b], la sucesión xn+1 = g(xn)](https://image.slidesharecdn.com/68806235-metodos-numericos-140414103409-phpapp02/85/68806235-metodos-numericos-12-320.jpg)






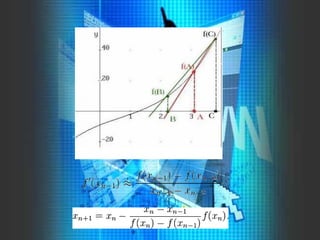


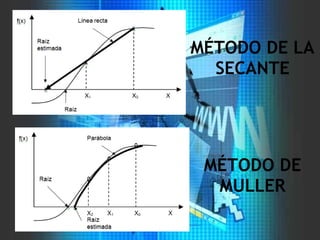
![El método de Müller, trabaja de manera
similar al método de la secante, pero en lugar
de hacer la proyección de una recta
utilizando dos puntos, requiere de tres puntos
para calcular una parábola.
Para esto necesitaremos de tres puntos [x0,
f(x0)], [x1, f(x1)] y [x2, f(x2)]. La
aproximación la podemos escribir como:
El método consiste en obtener los coeficientes
de los tres puntos, sustituirlos en la fórmula
cuadrática y obtener el punto donde la
parábola intercepta el eje x. La aproximación](https://image.slidesharecdn.com/68806235-metodos-numericos-140414103409-phpapp02/85/68806235-metodos-numericos-36-320.jpg)
![se busca esta parábola para intersectar los tres
puntos [x0, f(x0)], [x1, f(x1)] y [x2, f(x2)]. Los
coeficientes de la ecuación anterior se evalúan al
sustituir uno de esos tres puntos para dar:
La última ecuación genera que, , de esta forma, se
puede tener un sistema de dos ecuaciones con dos
incógnitas:
cxxbxxaxf +−+−= )()()( 20
2
200
cxxbxxaxf +−+−= )()()( 21
2
211
cxxbxxaxf +−+−= )()()( 22
2
222
)()()()( 20
2
2020 xxbxxaxfxf −+−=−
)()()()( 21
2
2121 xxbxxaxfxf −+−=−](https://image.slidesharecdn.com/68806235-metodos-numericos-140414103409-phpapp02/85/68806235-metodos-numericos-38-320.jpg)