Descargado 32 veces
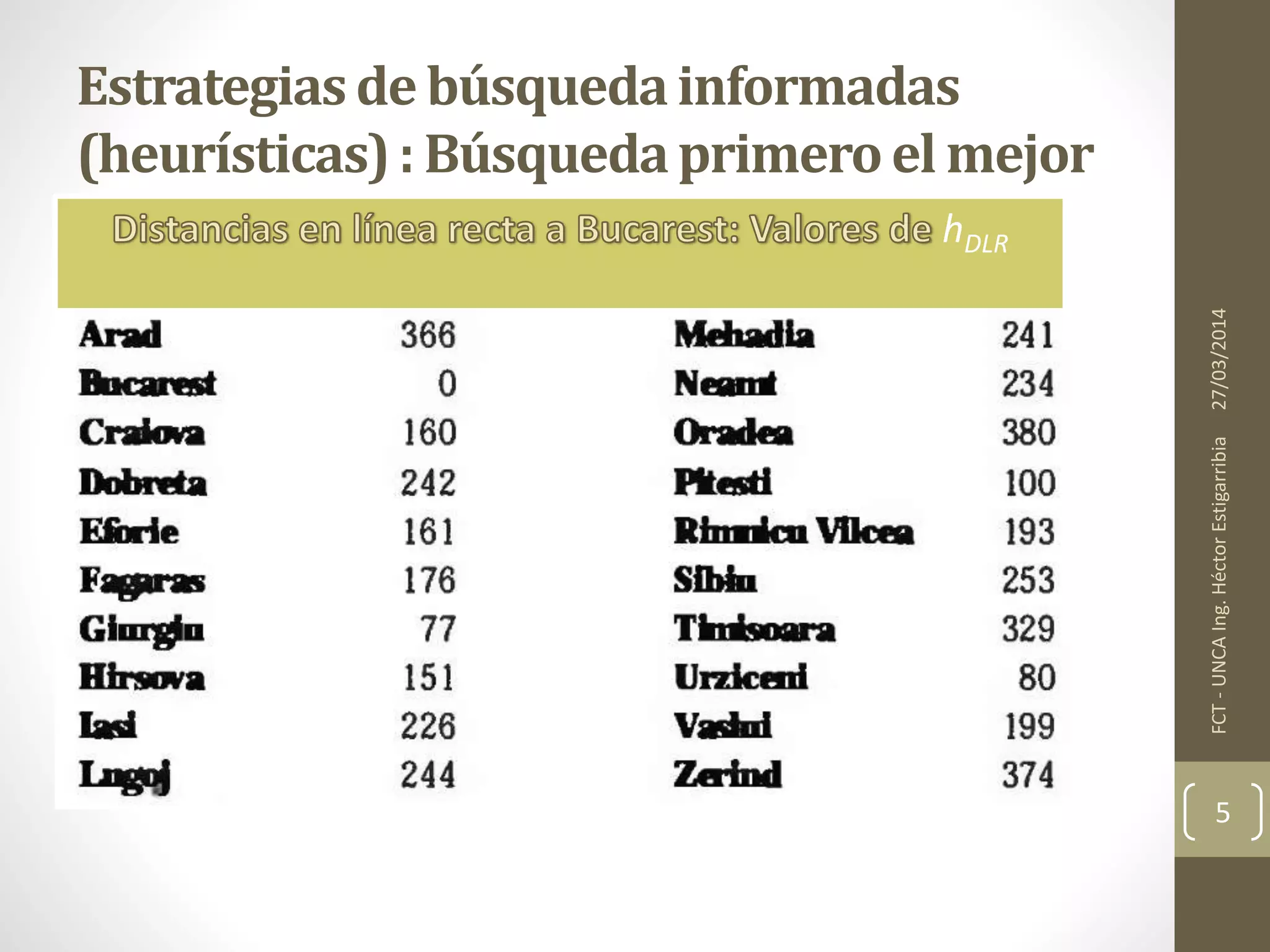
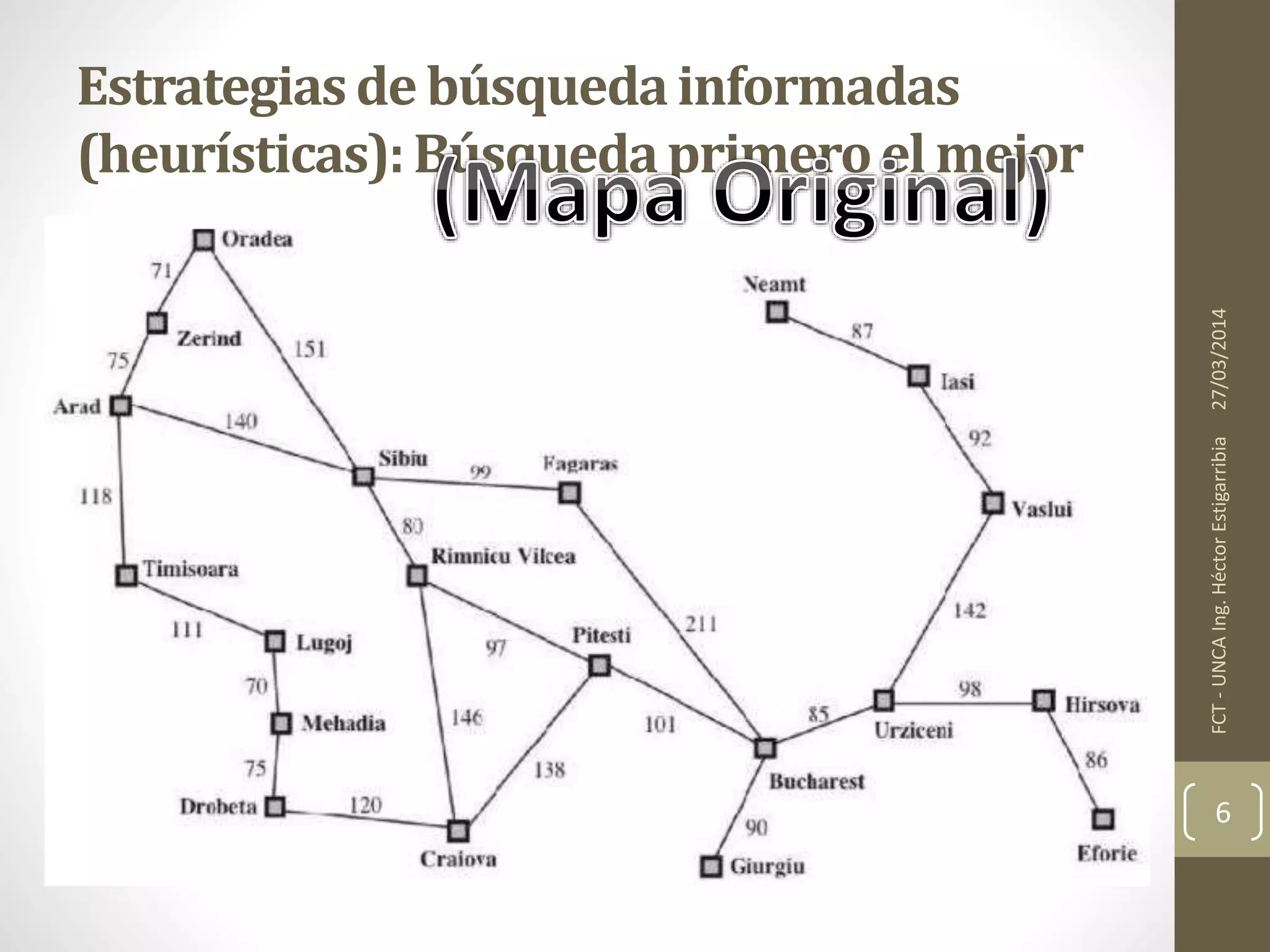
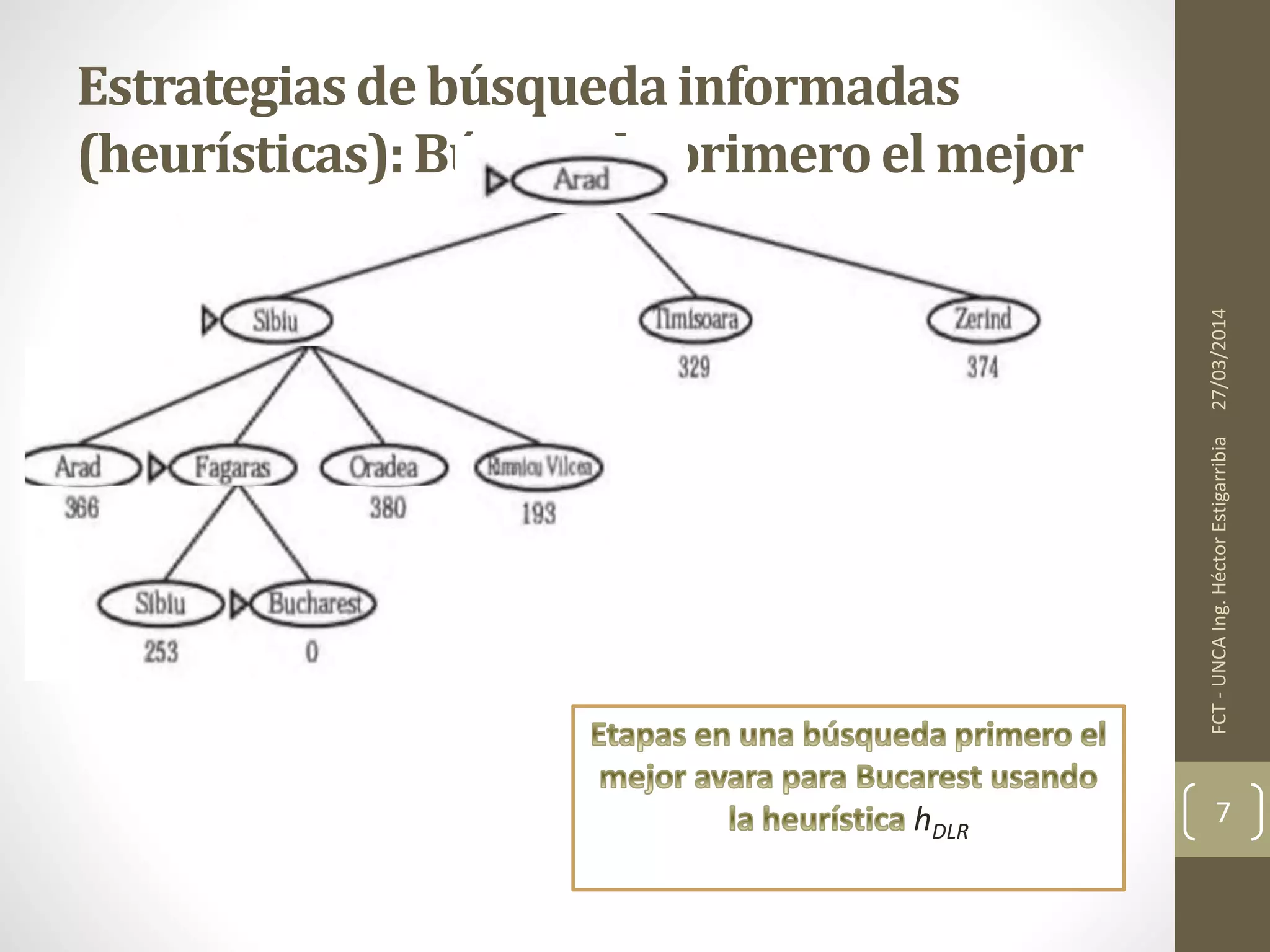
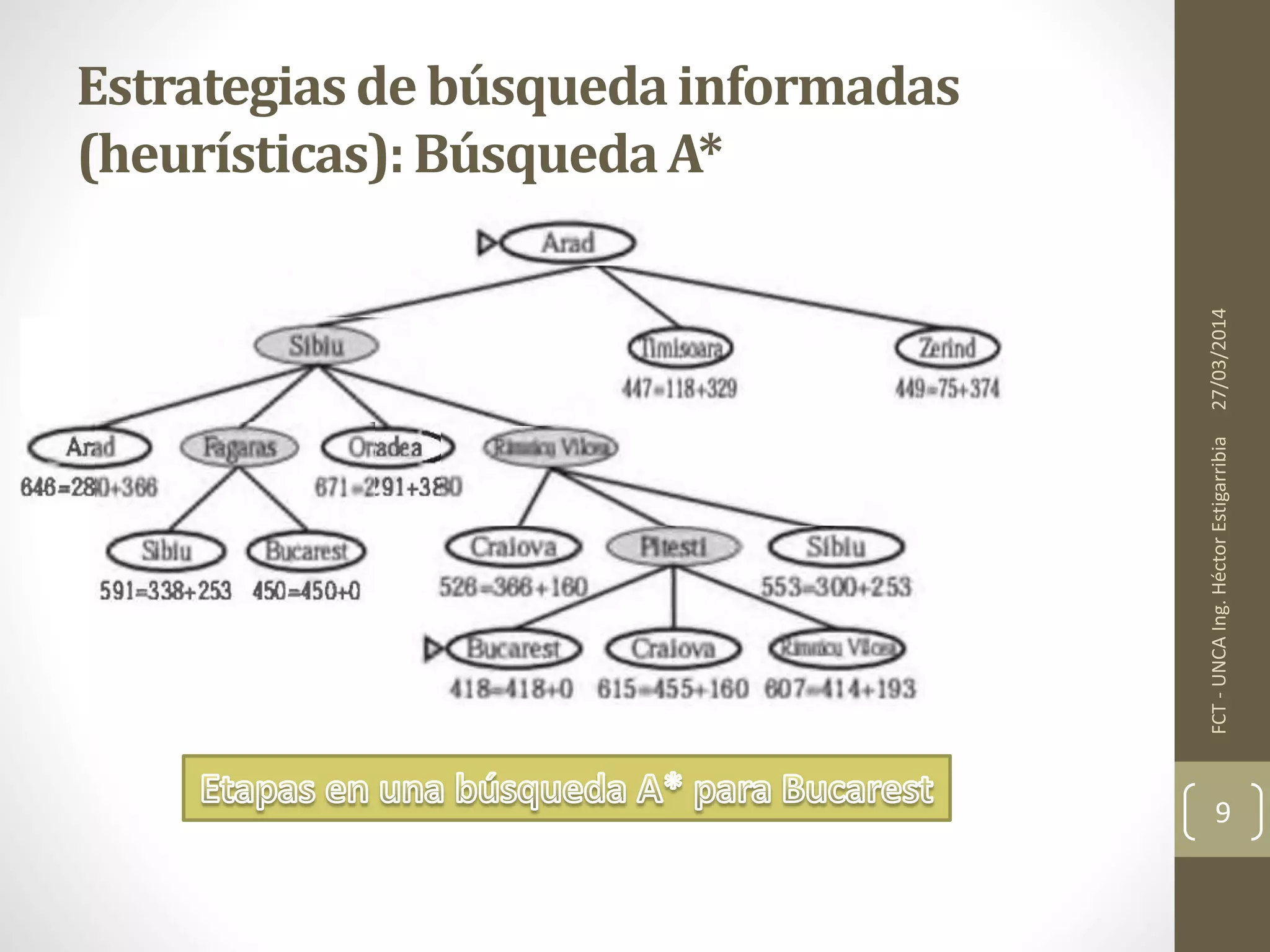
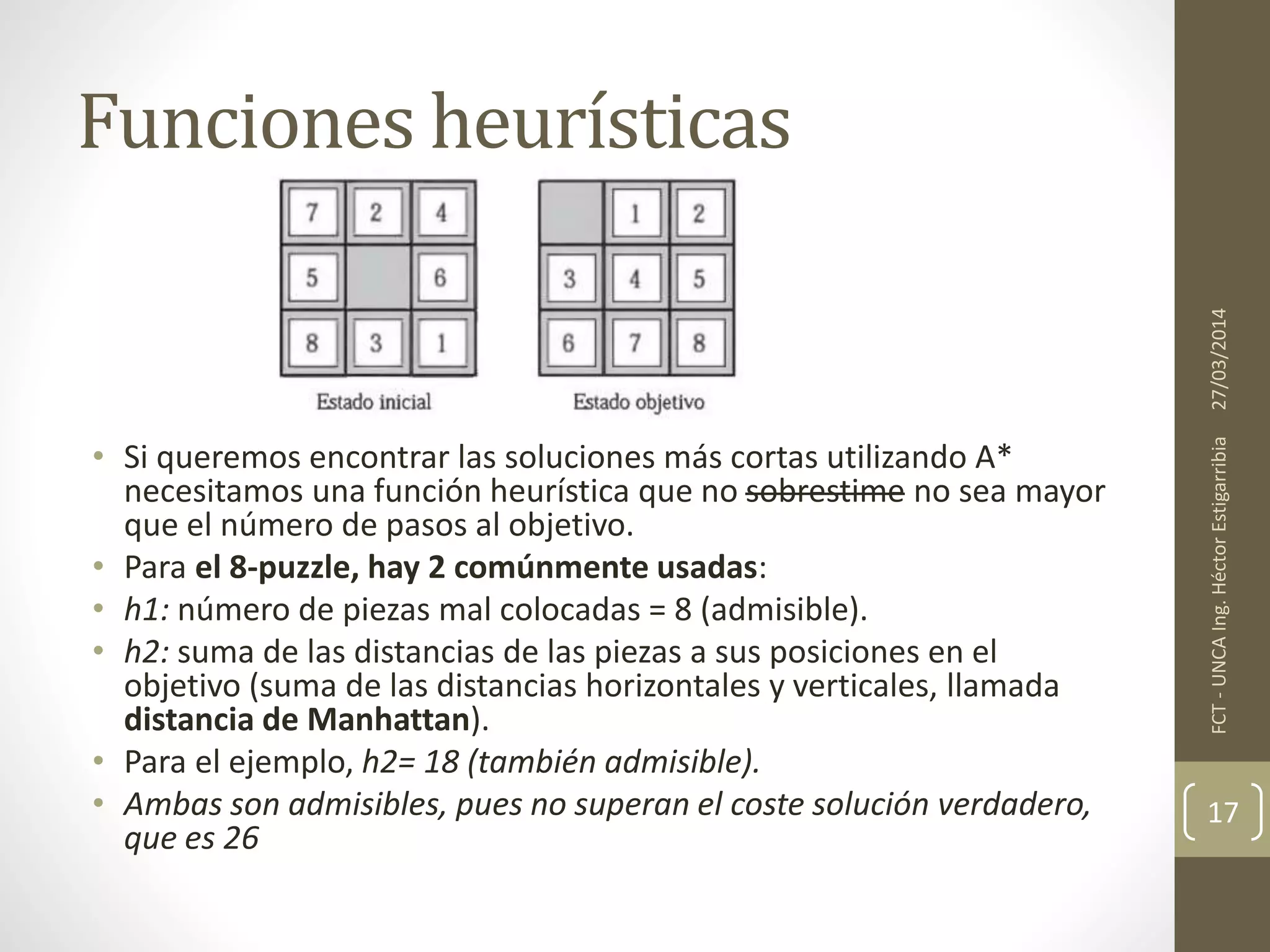
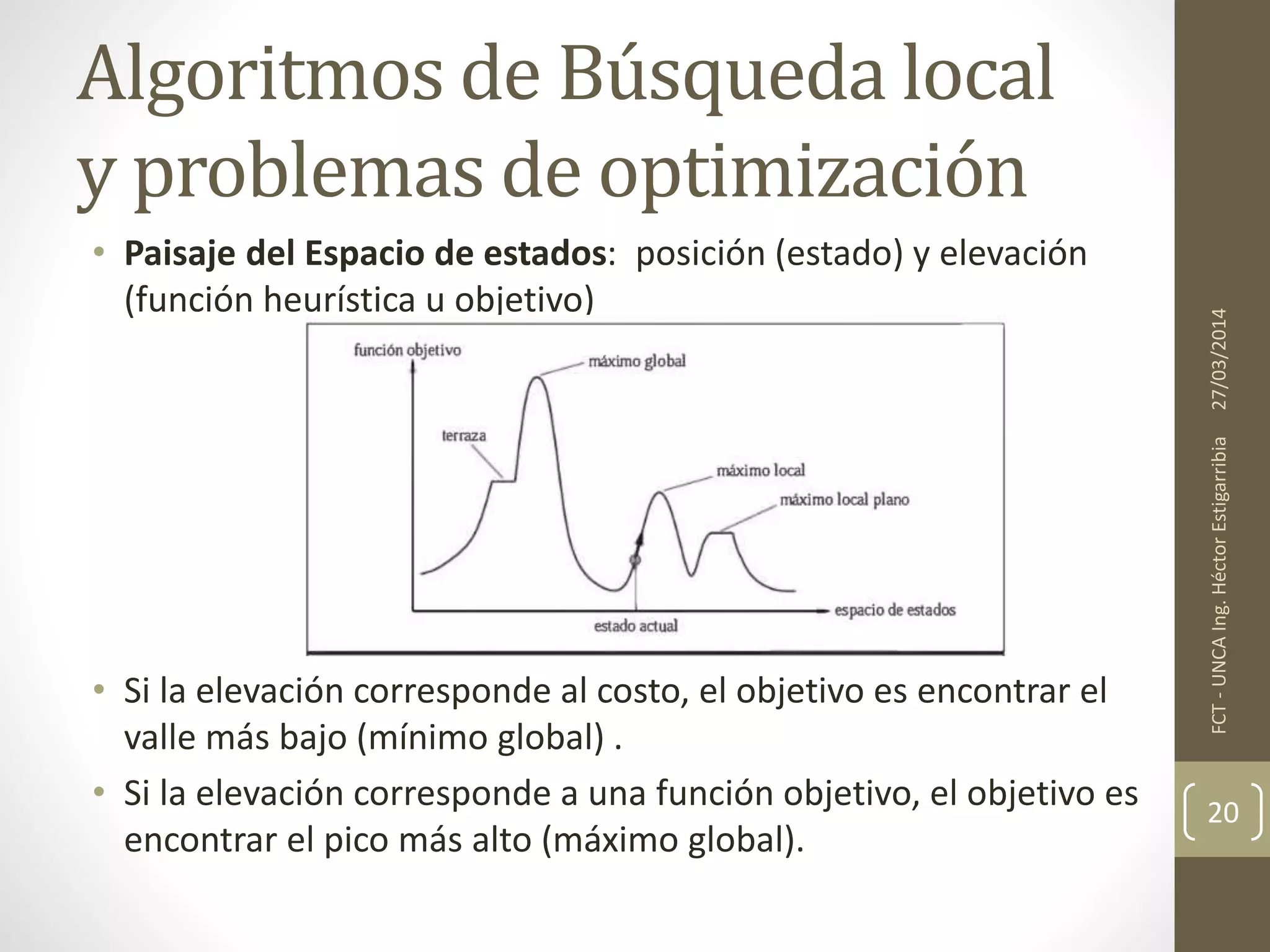
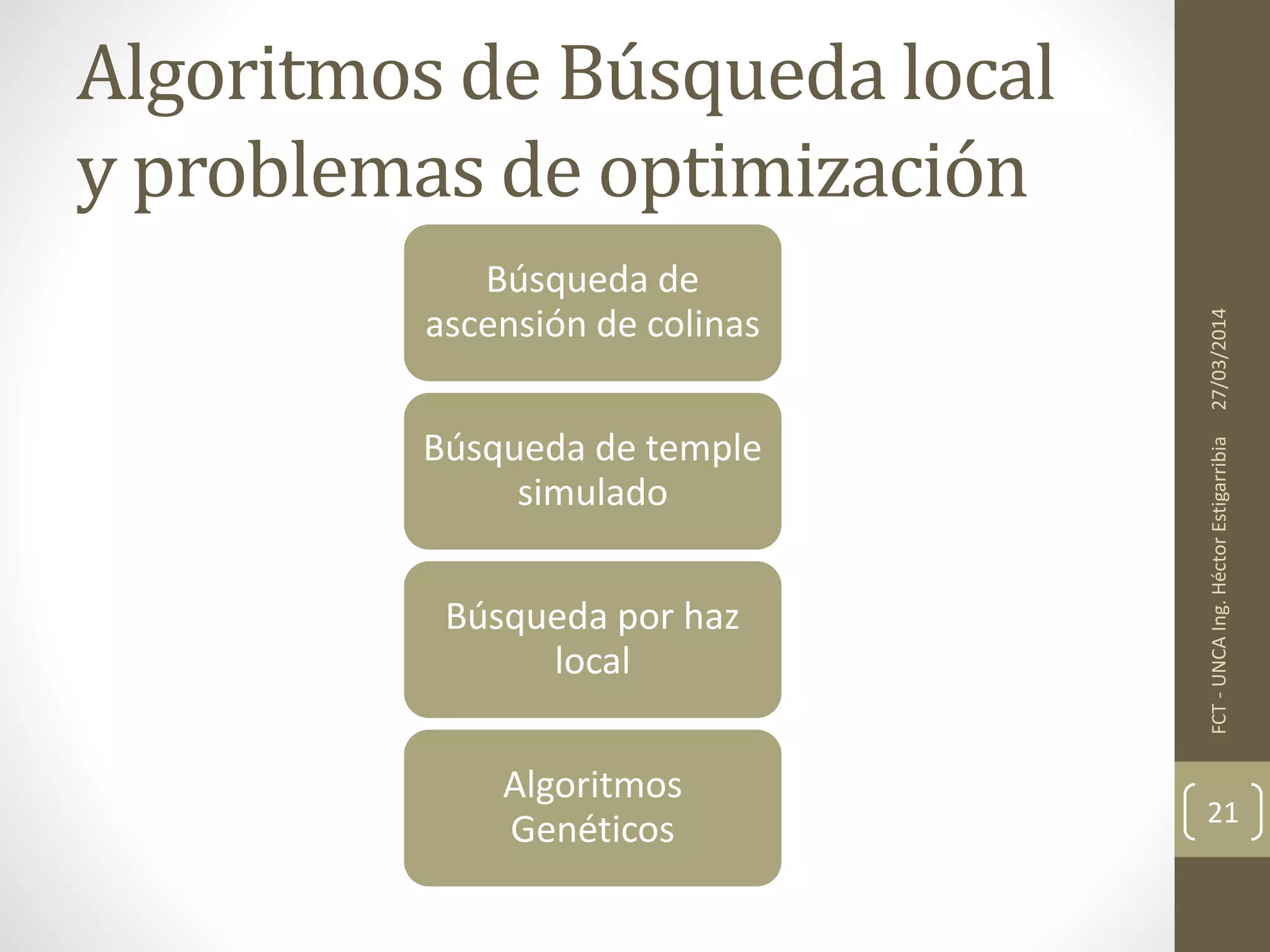

Este documento resume diferentes estrategias de búsqueda informada como la búsqueda primero el mejor, búsqueda A*, búsqueda heurística con memoria acotada, y algoritmos de búsqueda local para problemas de optimización. También discute el uso de funciones heurísticas para guiar la búsqueda de manera más eficiente.




















![Portafolio unidad 2 [Lenguajes y autómatas]- Expresiones y lenguajes regulares](https://cdn.slidesharecdn.com/ss_thumbnails/portafoliounidad2-180917180657-thumbnail.jpg?width=640&height=640&fit=bounds)