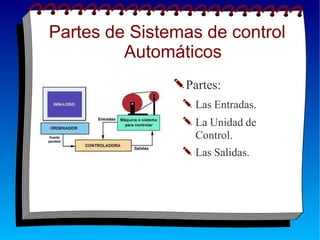
Este documento describe los componentes básicos de los sistemas de control automáticos, incluyendo las entradas, la unidad de control y las salidas. También describe varias controladoras comunes como Enconor, Cnice, Investrónica y BSP, destacando sus características de entrada y salida. Finalmente, explica el uso de una controladora para conectar dispositivos físicos a un ordenador de forma segura.