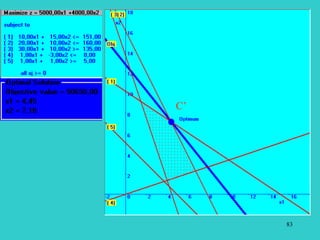
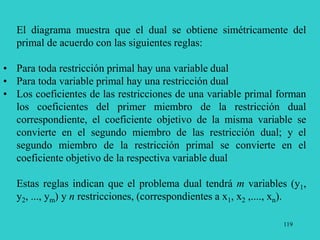
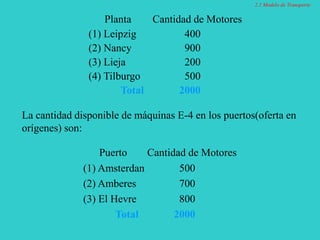
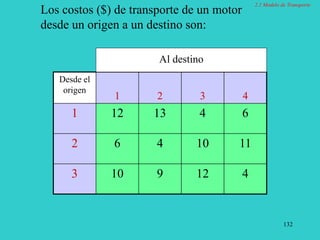
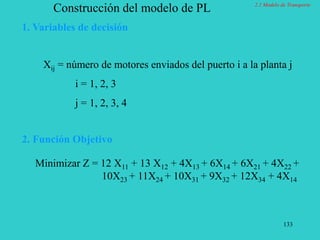
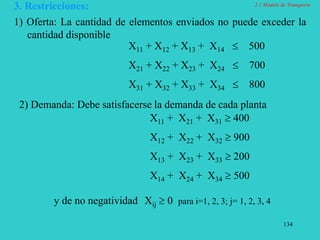
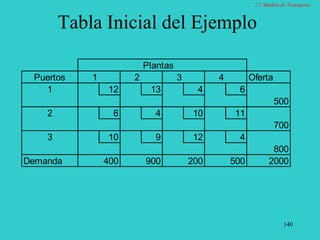
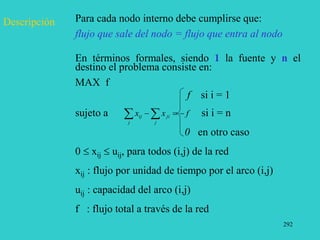
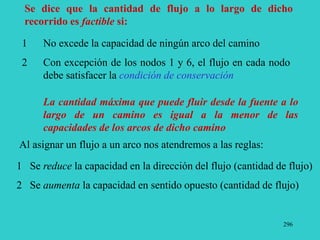
El documento presenta información sobre programación lineal. Explica qué es un problema de investigación de operaciones y cómo se aplican las técnicas de administración a problemas determinísticos y estocásticos. También describe el método científico para resolver problemas complejos en administración e introduce conceptos clave de programación lineal como funciones objetivo, variables de decisión y restricciones.

![28
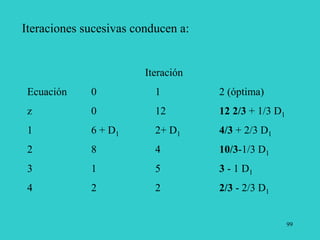
Entonces
Optimizar Z = CT X = [c1 c2 c3]
n
x
x
x
2
1
=
n
j
j
j x
c
1
sujeto a
A X B
y X 0
](https://image.slidesharecdn.com/curso-pl-230224144531-99d228b2/85/curso-pl-ppt-28-320.jpg)



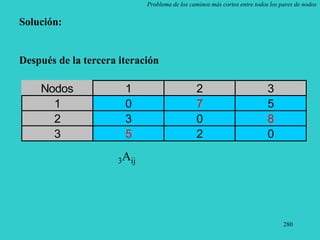
![240
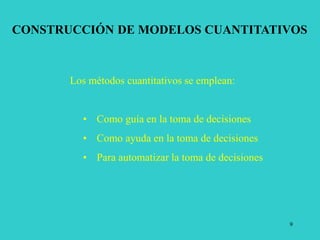
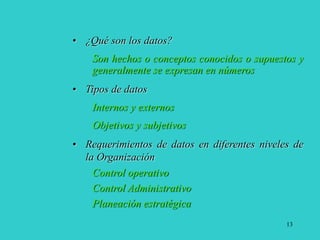
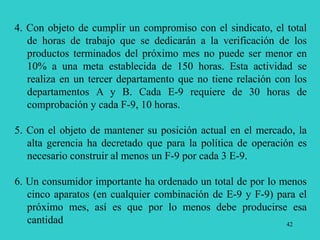
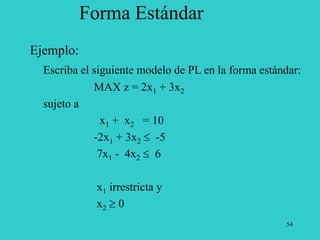
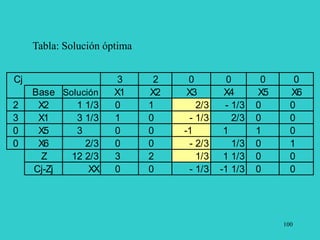
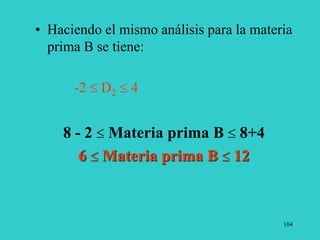
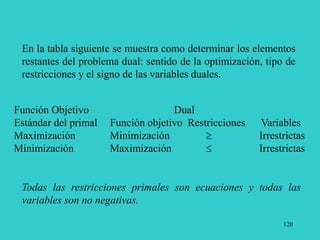
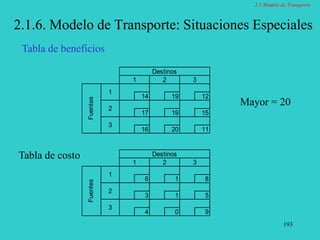
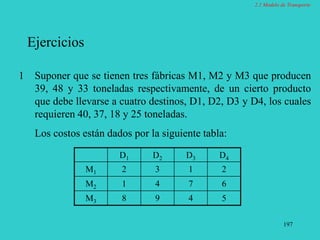
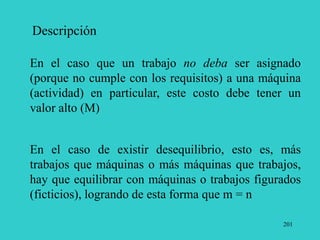
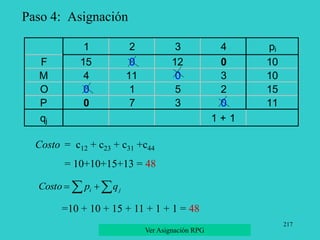
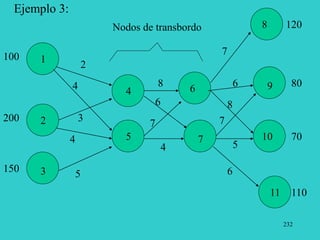
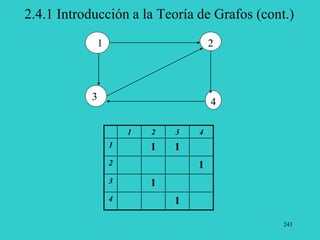
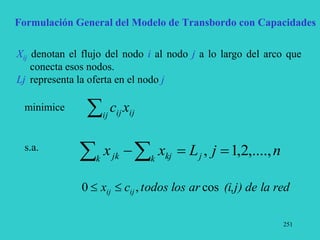
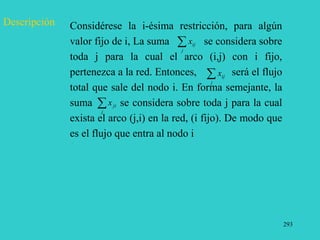
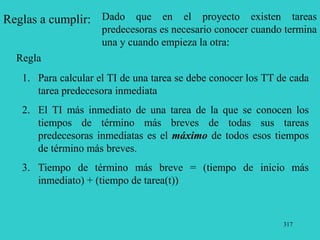
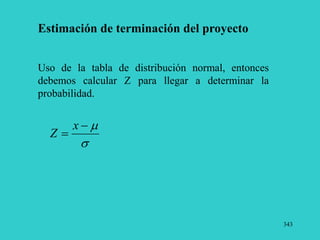
2.4.1 Introducción a la Teoría de Grafos (cont.)
Matriz de Adyacencia:
Para un grafo G, es una matriz A de dimensión NxN,
donde A[i,j] es verdadero (1) si, y sólo si, existe un arco
que vaya del vértice i al vértice j. En ausencia de arco
directo se representa generalmente por 0.
Ejemplo:Dado el siguiente grafo encontrar su matriz de
adyacencia](https://image.slidesharecdn.com/curso-pl-230224144531-99d228b2/85/curso-pl-ppt-240-320.jpg)
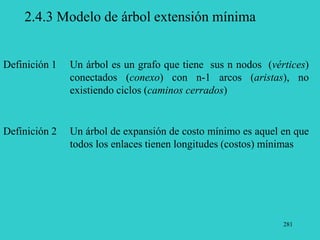
![242
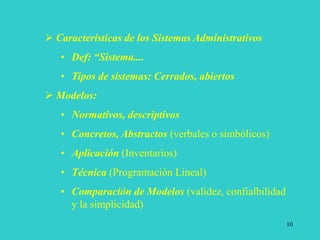
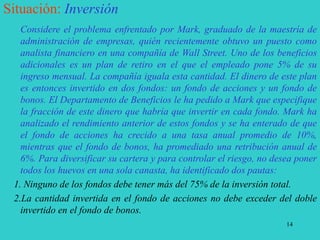
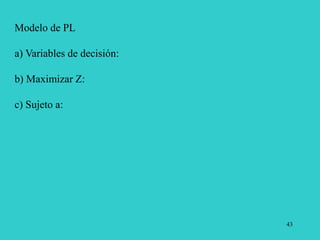
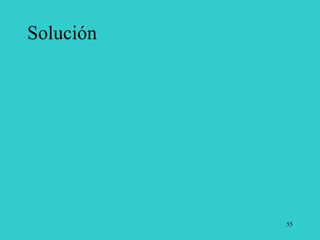
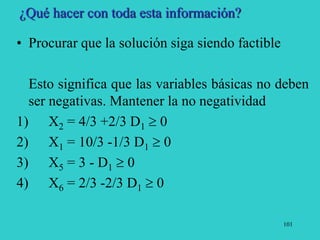
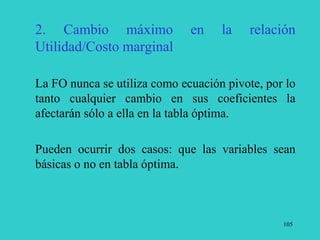
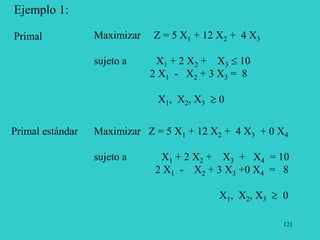
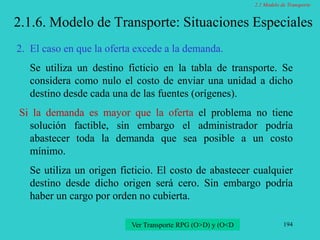
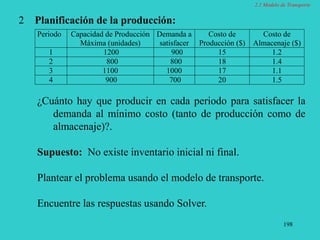
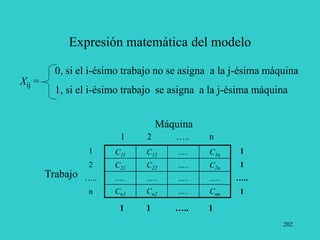
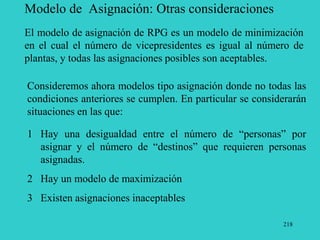
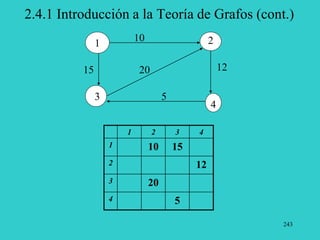
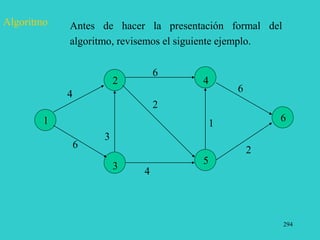
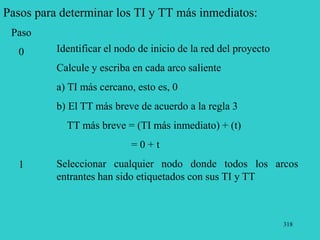
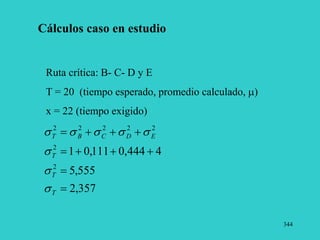
2.4.1 Introducción a la Teoría de Grafos (cont.)
Matriz de Costo:
Para un grafo G etiquetado, es una matriz C de dimensión
NxN, donde A[i,j] es el costo (valor de la etiqueta) si, y
sólo si, existe un arco que vaya del vértice i al vértice j.
En ausencia de arco directo se representa generalmente
por infinito (costo extremadamente alto, para la
simulación se hace uso de un valor fuera de contexto).
Ejemplo:Dado el siguiente grafo encontrar su matriz de costo](https://image.slidesharecdn.com/curso-pl-230224144531-99d228b2/85/curso-pl-ppt-242-320.jpg)
![244
2.4.1 Introducción a la Teoría de Grafos (cont.)
Para un grafo no dirigido, tanto la matriz de adyacencia
como la matriz de costo son simétricas, esto es:
A[i,j] = A[j,i]
ó
C[i,j] = C[j,i]](https://image.slidesharecdn.com/curso-pl-230224144531-99d228b2/85/curso-pl-ppt-244-320.jpg)
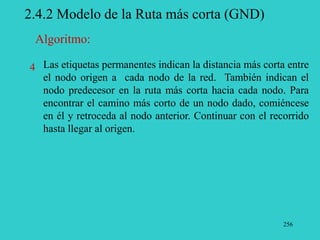
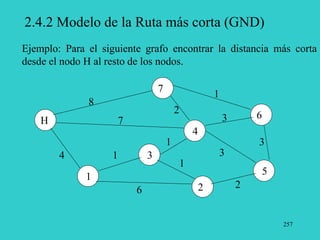
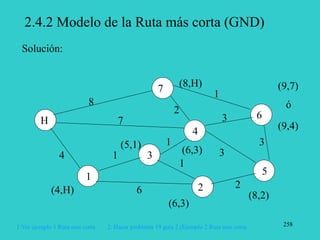
![254
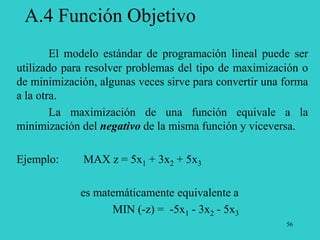
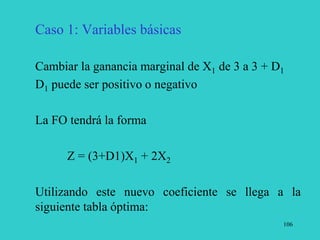
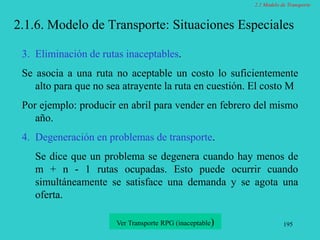
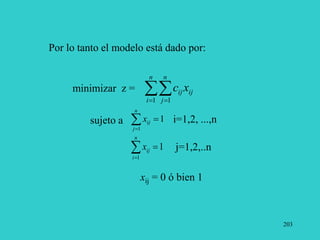
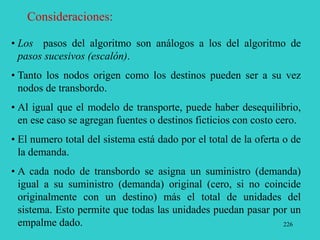
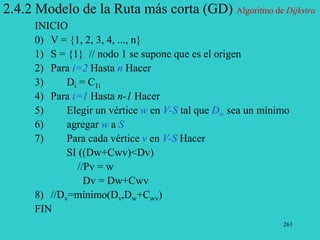
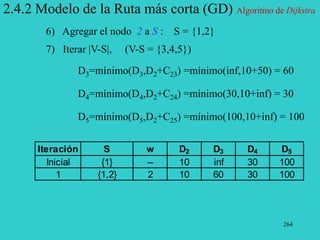
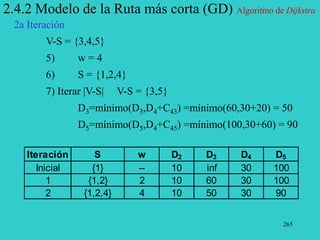
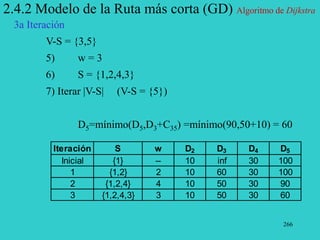
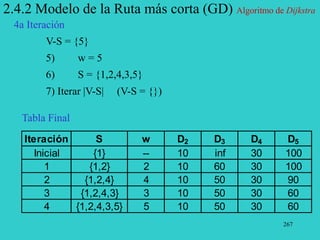
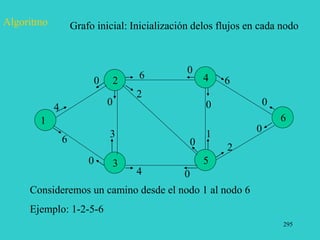
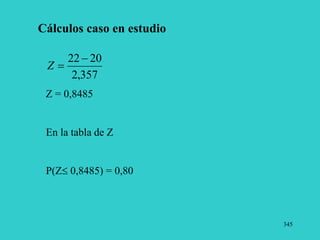
2.4.2 Modelo de la Ruta más corta
Considerénse todos los nodos que estén directamente
conectados con el origen. Etiquetarlos con la distancia al
origen y su nodo predecesor. Etiquetas temporales,
[distancia, nodo].
De entre todos los nodos con etiquetas temporales,
escoger el que tenga la distancia menor y se marca como
permanente. Si todos están con etiquetas permanentes se
va al paso cuatro.
a) Algoritmo: Grafo no dirigido
1
2](https://image.slidesharecdn.com/curso-pl-230224144531-99d228b2/85/curso-pl-ppt-254-320.jpg)
![320
Cálculo de TI y TT:
1
2
3
4
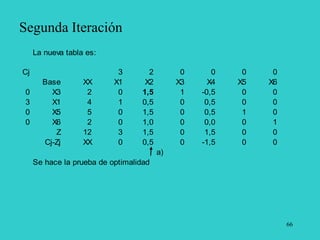
5
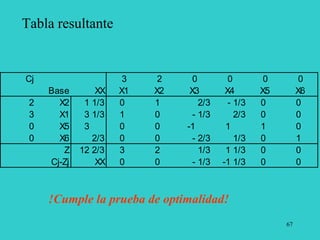
6
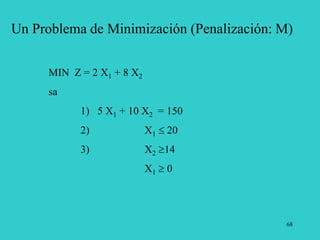
7
9
D[8,12]
8
Fic](https://image.slidesharecdn.com/curso-pl-230224144531-99d228b2/85/curso-pl-ppt-320-320.jpg)
![325
1
2
3
4
5
6
7
9
8
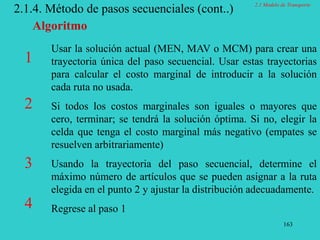
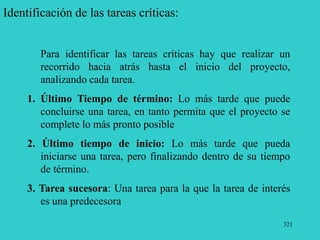
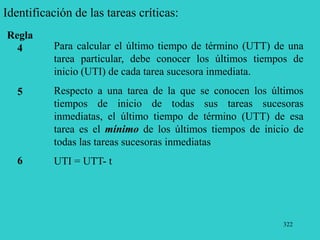
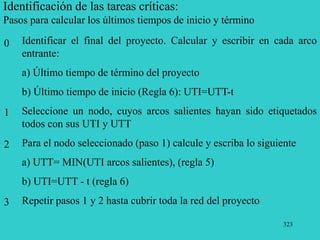
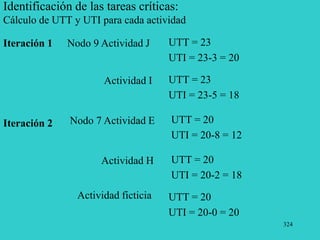
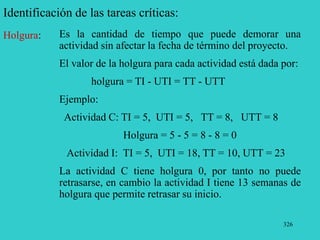
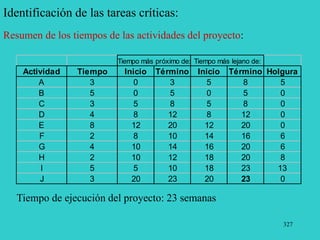
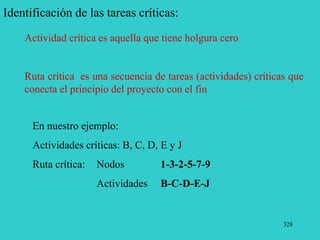
Identificación de las tareas críticas:
Cálculo de UTT y UTI para cada actividad . Finalmente se tiene
D[8,12]
[8,12]
[5,8]
Fic](https://image.slidesharecdn.com/curso-pl-230224144531-99d228b2/85/curso-pl-ppt-325-320.jpg)
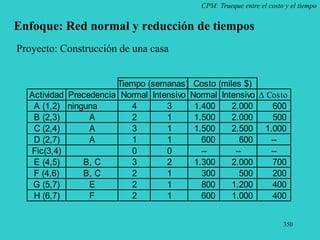
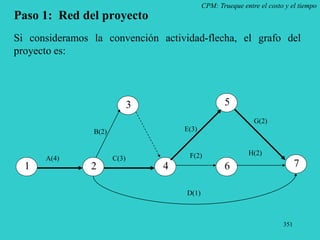
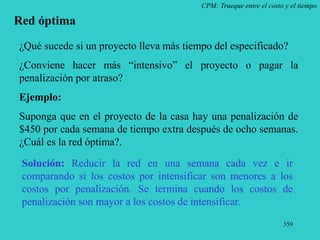
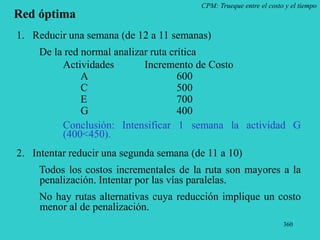
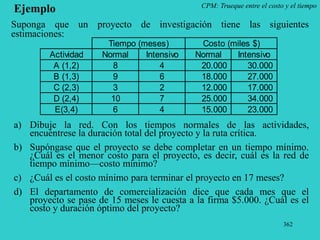
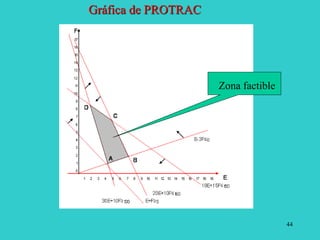
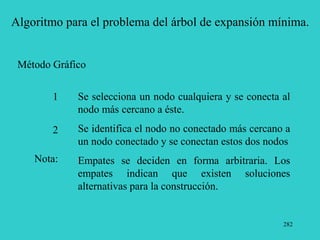
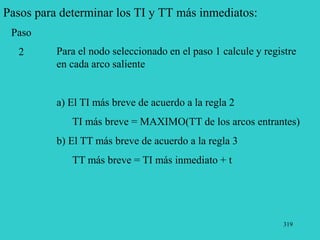
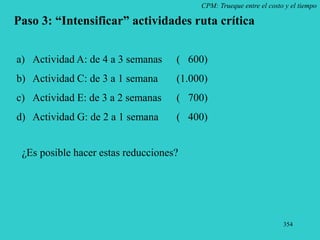
![352
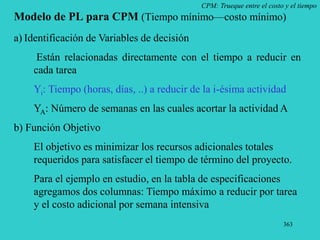
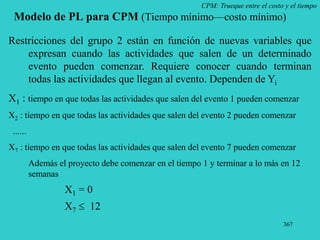
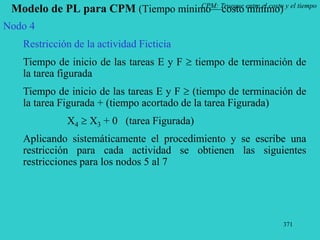
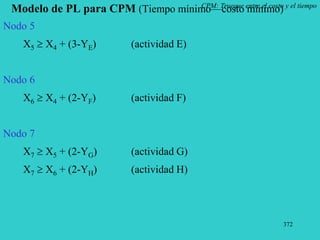
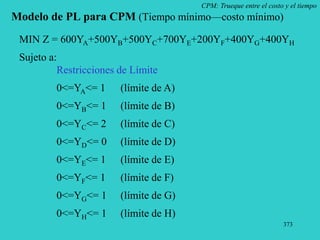
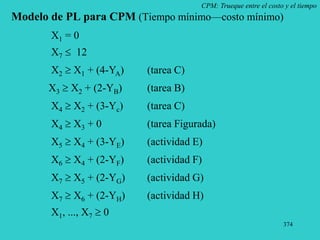
CPM: Trueque entre el costo y el tiempo
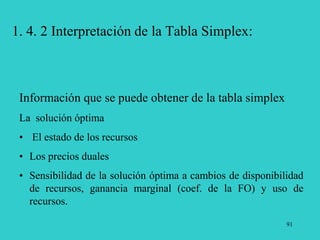
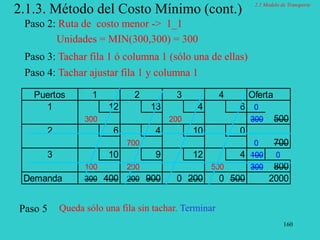
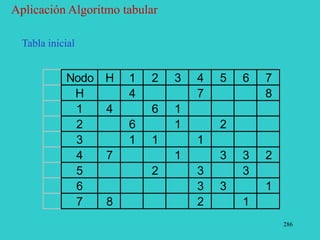
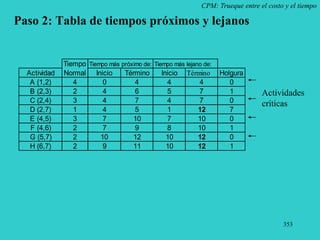
Paso 2: Tiempos de Inicio y de Término, holgura y ruta crítica
2
3
6
5
7
H(2)[9,11]
[10,12]
1
F(2)[7,9]
4
C(3)[4,7]
En el grafo se muestran los tiempos de inicio y de término más
próximos y los más lejanos, y la ruta crítica. El tiempo mínimo
para la ruta crítica es de 12 semanas a un costo normal de $8.000.
A(4)[0,4]
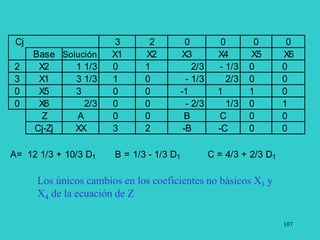
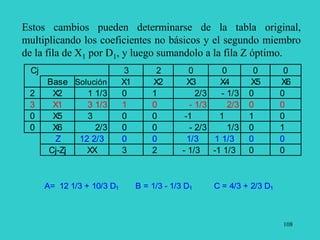
0
0 0
0
12 12
D(1)[4,5]
[8,10]
[4,7]
[0,4]
[11,12]](https://image.slidesharecdn.com/curso-pl-230224144531-99d228b2/85/curso-pl-ppt-352-320.jpg)
![355
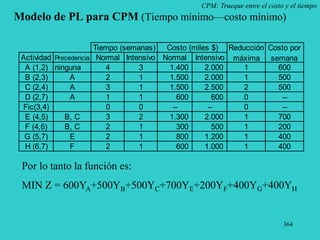
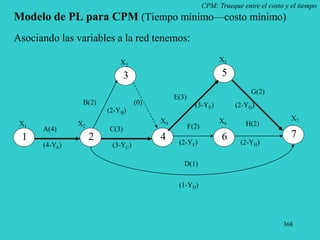
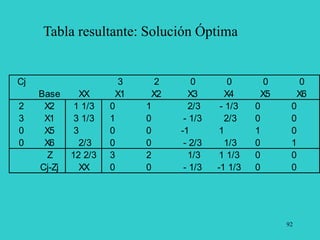
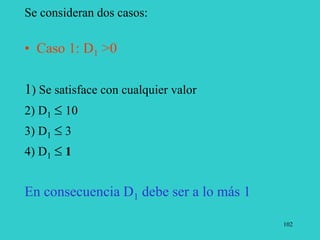
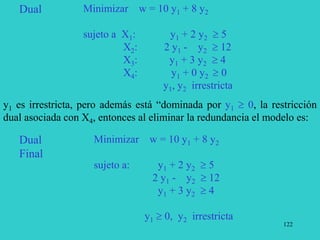
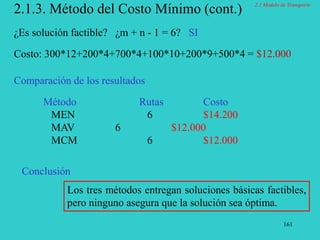
CPM: Trueque entre el costo y el tiempo
Reducción de Actividades ruta crítica
2
3
6
5
7
H(2)[9,11]
1
F(2)[7,9]
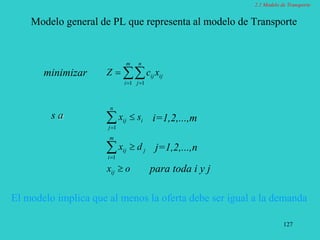
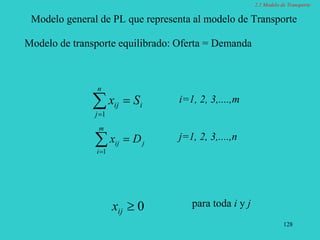
4
C(3 1)
La ruta crítica disminuyó a 7 semanas, ¿seguirá manteniéndose
como tal?. No
Hay que ver si es posible reducir las actividades paralelas a la ruta
crítica inicial, sólo hasta igualar tiempos.
A(4 3)
0
0 0
0
D(1)[4,5]](https://image.slidesharecdn.com/curso-pl-230224144531-99d228b2/85/curso-pl-ppt-355-320.jpg)
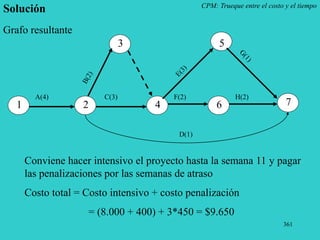
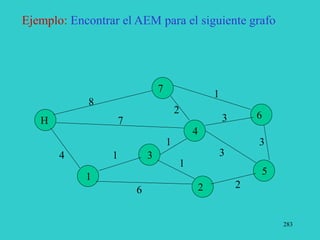
![358
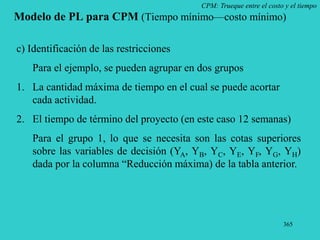
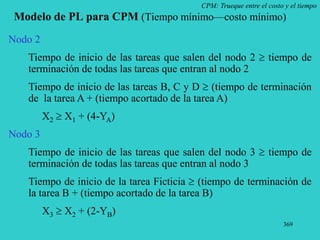
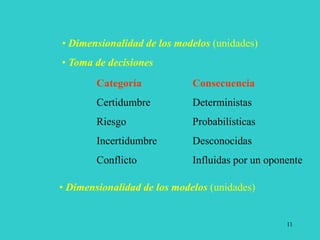
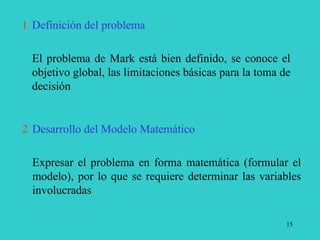
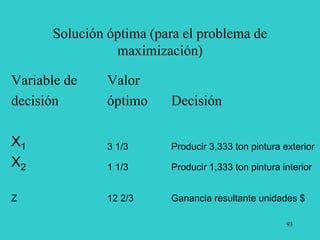
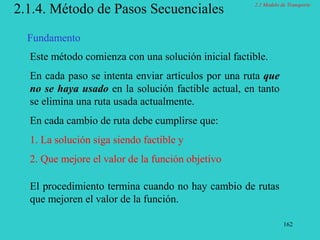
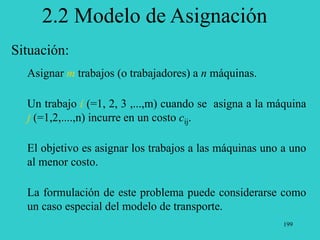
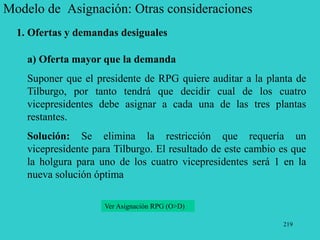
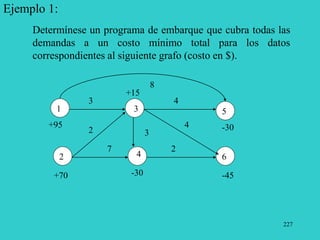
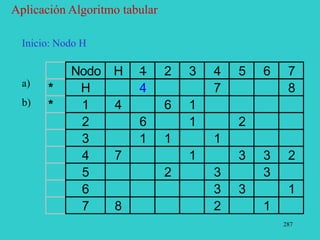
CPM: Trueque entre el costo y el tiempo
Grafo final
2
3
6
5
7
H(2)[5,7]
[5,7]
1
F(1)[4,5]
4
C(1)[3,4]
En el grafo se muestran los tiempos de inicio y de término más
próximos y los más lejanos, y la ruta crítica. El tiempo mínimo
para la ruta crítica es de 7 semanas a un costo normal de $11.400.
A(3)[0,3]
0
0 0
0
7 7
D(1)[3,4]
[4,5]
[3,4]
[0,3]
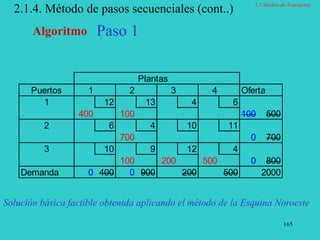
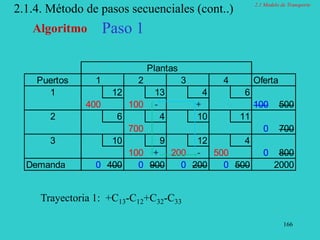
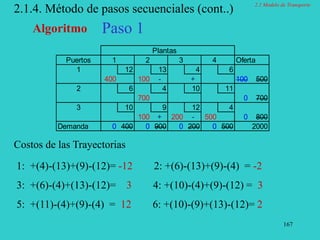
[6,7]](https://image.slidesharecdn.com/curso-pl-230224144531-99d228b2/85/curso-pl-ppt-358-320.jpg)