El documento presenta una serie de métodos numéricos para resolver ecuaciones no lineales, destacando la importancia de los métodos iterativos como el de punto fijo y el de Newton. Cada método se describe con explicaciones sobre su formulación, ejemplos prácticos y condiciones de convergencia, enfatizando el uso de jacobianos y gráficas para aproximar soluciones. Se incluyen también variaciones de estos métodos, como el método de Broyden, destacando su utilidad y aplicación en sistemas de ecuaciones.





![6
Ejemplo:
𝑓1( 𝑥, 𝑦, 𝑧) = 𝑥2
− 𝑥 + 2𝑦2
+ 𝑦𝑧 − 10 = 0
𝑓2( 𝑥, 𝑦, 𝑧) = 5𝑥 − 6𝑦 + 𝑧 = 0
𝑓3( 𝑥, 𝑦, 𝑧) = 𝑧 − 𝑥2 − 𝑦2 = 0
Paso 1: Se calculan las derivadas parciales de cada función para poder crear la
matriz jacobiana
𝜕𝑓1
𝜕𝑥
= 2𝑥 − 1
𝜕𝑓1
𝜕𝑦
= 4𝑦 + 𝑧
𝜕𝑓1
𝜕𝑧
= 𝑦
𝜕𝑓2
𝜕𝑥
= 5
𝜕𝑓2
𝜕𝑦
= −6
𝜕𝑓2
𝜕𝑧
= 1
𝜕𝑓3
𝜕𝑥
= −2𝑥
𝜕𝑓3
𝜕𝑦
= −2𝑦
𝜕𝑓3
𝜕𝑧
= 1
Obteniendo:
J = [
2𝑥 − 1 4𝑦 + 𝑧 𝑦
5 −6 1
−2𝑥 −2𝑦 1
]
Paso 2: Graficamos las funciones para aproximar el vector (x0, y0, z0)
Con la gráfica podemos proponer
el vector x0 = (1,1,1)](https://image.slidesharecdn.com/ebookjaimecasales-170518084452/85/Ebook-jaime-casales-7-320.jpg)
![7
Paso 3: Sustituimos los valores en la matriz jacobiana y en el vector Fx0 teniendo
como resultado
J = [
1 5 1
5 −6 1
−2 −2 1
] y Fx0
=[
(1)
2
− 1 + 2(1)2 + (1 ∗ 1) − 10
5(1) − 6(1) + 1
1 − (1)
2
− (1)
2
]
Paso 4: Utilizamos la extensión del método de newton para calcular el vector
siguiente con la formula Xn+1=Xn-1 - (J^ (-1)*Fxn-1) hasta que se cumpla la
tolerancia deseada
𝑥(1)
= [
1
1
1
] - [
1 5 1
5 −6 1
−2 −2 1
]
−1
∗ [
−7
0
−1
]
= [
1
1
1
] - [
1 5 1
5 −6 1
−2 −2 1
] ∗ [
−7
0
−1
]
= [
1
1
1
] - [
−7
0
−1
]
𝑥(1)
= [
1
1
1
]](https://image.slidesharecdn.com/ebookjaimecasales-170518084452/85/Ebook-jaime-casales-8-320.jpg)






![15
Corresponde al caso de interpolación lineal con polinomios algebraicos e identificación de los
valores de la función en los nodos de interpolación. Base de la interpolación: [ ] n B = 1, x, ... , x
Soporte (nodos) de la interpolación: [ ] n S x , x ,..., x = 0 1 Y el polinomio interpolador sería:
Los polinomios lk (x), k = 0,1,...,n se llaman Polinomios de Lagrange para la base B y el soporte
de interpolación S dado. 5 Así, pues, usando los polinomios de Lagrange, la fórmula de
interpolación en la base y soporte indicados tendría esta expresión para la función f(x):](https://image.slidesharecdn.com/ebookjaimecasales-170518084452/85/Ebook-jaime-casales-16-320.jpg)

![17
Los métodos para determinar la representación explícita de un polinomio de
interpolación, a partir de datos tabulados, se conocen como métodos de
diferencias divididas, y pueden usarse para derivar técnicas para aproximar las
derivadas y las integrales de funciones, así como para aproximar las soluciones de
ecuaciones diferenciales.
El tratamiento de las tablas de diferencias divididas supone que la función f(x) es
conocida para varios valores de x.
Ejemplo:
El problema a resolver es el mismo que el anterior visto (lagrange )
Paso 1: Hacemos la tabla donde calcularemos los valores de f[1], f[2], …, f[n]
donde f[n] debe satisfacer en los parámetros del grado de polinomio que se desea
y para esto utilizaremos la fórmula
𝑓[ 𝑥𝑖; 𝑥𝑖+1] =
𝑓[ 𝑥𝑖+1] − 𝑓[ 𝑥𝑖]
𝑥𝑖+1 − 𝑥𝑖
Teniendo como resultado:](https://image.slidesharecdn.com/ebookjaimecasales-170518084452/85/Ebook-jaime-casales-18-320.jpg)

![19
Dados una función real f definida en [a, b], r + 1 puntos distintos x0, . . . , xr en
dicho intervalo y enteros no negativos m0, . . . , mr, n de suerte que se satisfaga
(2.1) y que las derivadas de f que vamos a escribir existan, determinar un
polinomio Pn de grado menor o igual que n tal que Pn(x0) = f(x0), P0 n (x0) = f 0
(x0), . . . , P(m0) n (x0) = f (m0) (x0); Pn(x1) = f(x1), P0 n (x1) = f 0 (x1), . . . , P(m1)
n (x1) = f (m1) (x1); . . . . . . . . . . . . Pn(xr) = f(xr), P0 n (xr) = f 0 (xr), . . . , P(mr) n
(xr) = f (mr) (xr).
Ejemplo:
Un automóvil realiza un recorrido por una carretera recta y se cronometra su
recorrido en varios puntos, los cuales se muestran en la siguiente tabla.
t(seg) 3 5 8 13
d(pies) 225 385 625 993
v(pies/seg) 77 80 74 72
Estimar d(t=10s)
Paso 1: Calculamos los Lj(xj) y L’j(xj) apoyándonos en la siguiente fórmula:
𝐿0 =
(𝑥 − 𝑥1)(𝑥 − 𝑥2)
(𝑥0 − 𝑥1)(𝑥0 − 𝑥2)
L0=(X-5)(X-8)(X-13)/(3-5)(3-8)(3-13) L0'(x)=3x^2-52x+209/-100
L1=(X-3)(X-8)(X-13)/(5-3)(5-8)(5-13) L1'(x)=3x^2-48x+167/48
L2=(X-3)(X-5)(X-13)/(8-3)(8-5)(8-13) L2(x)=3x^2-42x+119/-75
L3=(X-3)(X-5)(X-8)/(13-3)(13-5)(13-8) L3(x)=3x^2-32x+79/400](https://image.slidesharecdn.com/ebookjaimecasales-170518084452/85/Ebook-jaime-casales-20-320.jpg)
![20
Obteniendo:
i Xi f(xj) f'(xj) Lj(x) L'j(xj)
0 3 225 77 0.3 -0.8
1 5 385 80 -0.875 0.04166667
2 8 625 74 1.4 0.33333333
3 13 993 72 0.175 0.425
Paso 2: Continuamos con H= [1 − 2(𝑥 − 𝑥𝑗)𝐿′
(𝑥𝑗)]𝐿2
(𝑥) y con H’ =
(𝑥 − 𝑥𝑗)𝐿2.
Hn,j(x) Ĥn,j(x)
1.098 0.63
0.44661458 3.828125
-
0.65333333
3.92
0.10871875 -0.091875
Paso 3: Realizamos las sumatorias del método para calcular el punto interpolado
teniendo como resultado
∑f(xj)Hn,j(x) ∑f'(xj)Ĥn,j(x)
118.6210000 638.225
= 756.8460000](https://image.slidesharecdn.com/ebookjaimecasales-170518084452/85/Ebook-jaime-casales-21-320.jpg)

![22
I xi yi hi F[1] si ai bi ci
0 0.62 2.14 0.12 6.83333333 0 -
1.28247133
0 8.11580466
1 0.74 2.96 0.26 -
0.61538462
-
64.1235665
3.45228836 -
32.0617833
4.26839067
2 1 2.8 0.78 1.02564103 15.5446265 -
2.98989176
7.77231323 -
2.04687154
3 1.78 3.6 0.64 -0.25 -
7.45454089
1.02719125 -
3.72727045
1.10826183
4 2.42 3.44 0.74 -
0.37837838
2.17537709 -
0.60219732
1.08768854 -
0.58107058
5 3.16 3.16 1.54 -
1.37662338
-
2.70730387
1.48588409 -
1.35365193
-
0.77788349
6 4.7 1.04 2.3 0.4173913 3.08185494 -2.6372627 1.54092747 -
0.48947917
7 7 2 2.08 -
0.70192308
-
3.79796081
4.56095709 -
1.89898041
-
1.31300093
8 9.08 0.54 1.28 1.09375 9.35864619 -
9.36589542
4.67932309 4.47011186
9 10.36 1.94 -0.84 -
1.97619048
-
34.5439886
-
4.83615841
-
17.2719943
-
11.6485073
10 9.52 3.6
g0(x)= -1.2825(x-0.62)^3+8.1158(x-0.62)+2.14
g1(x)= 3.4523(x-0.74)^3-32.0618(x-0.74)^2+4.2684(x-0.74)+2.96
g2(x)= -2.9899(x-1)^3+7.7723(x-1)^2-2.0469(x-1)+2.8
g3(x)= 1.0272(x-1.78)^3-3.7273(x-1.78)^2-2.0469(x-1.78)+3.6
g4(x)= -0.6022(x-2.42)^3+1.0877(x-2.42)^2-0.5811(x-2.42)+3.44
g5(x)= 1.4859(x-3.16)^3-1.3537(x-3.16)^2-0.7779(x-3.16)+3.16
g6(x)= -2.6373(x-4.7)^3+1.5409(x-4.7)^2-0.4895(x-4.7)+1.04
g7(x)=4.5610(x-7)^3-1.8990(x-7)^2-1.3130(x-7)+2
g8(x)= -9.3659(x-9.08)^3+4.6793(x-9.08)^2+4.4701(x-9.08)+0.54
g9(x)= -4.8362(x-10.36)^3-17.2720(x-10.36)^2-11.6485(x-10.36)+1.94](https://image.slidesharecdn.com/ebookjaimecasales-170518084452/85/Ebook-jaime-casales-23-320.jpg)

![24
Se nos plantea ahora el problema de calcular la derivada de una función de la que
sólo conocemos un número finito de datos. Dos métodos son los más usuales a la
hora de resolver tal problema: Derivar un polinomio de interpolación construido
mediante alguno de los métodos estudiados en el capítulo anterior. La función
permite el cálculo de las sucesivas derivadas en un punto dado del polinomio
interpolante asociado a nuestros datos.
Los métodos de integración numérica nos permiten integrar funciones que están
definidas analíticamente o de las que sólo conocemos su tabla en un número finito
de puntos. H.2. INTEGRACION NUM ´ ERICA ´ 75 Consideremos el caso en que
tenemos un conjunto de puntos a = x0 < x1 < . . . < xn = b igualmente espaciados
y que queremos calcular la integral de determinada función f definida sobre el
intervalo [a, b]. Podemos entonces considerar el polinomio interpolador de f
respecto a los nodos xi y su integral con la esperanza de así obtener una
aproximación a la integral de f.](https://image.slidesharecdn.com/ebookjaimecasales-170518084452/85/Ebook-jaime-casales-25-320.jpg)

![26
Ejemplo:
El cuerpo de revolución que se muestra en la figura, se obtiene de girar la curva
dada por
y=1+〖(x/2)]^2 0≤x≤2
Entorno al eje x. Calcular el volumen
f(x)=〖π⌊1+ 〖(x/2)〗^2 ⌋〗^2 0≤x≤2
Paso 1: Acomodamos los datos
Paso 2: Identificamos que estén igualmente espaciados calculando H
h= 0.5
Paso 3: Sustituimos los valores en las fórmulas de trapecio, Simpson 1/3 y 3/8
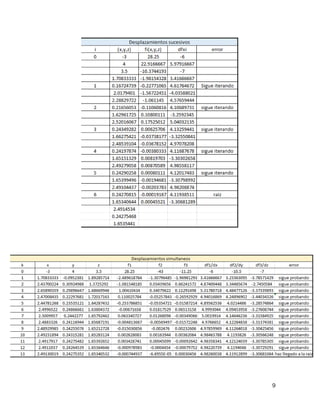
Trapecio 11.98959384 Error de 0.02225167
Simpson 1/3 11.73188507 Error de 0.00027902
Simpson 3/8 11.75188363 error de 0.00198413
Valor exacto 11.72861257
Por lo tanto el método de integración por de 1/3 Simpson tiene menor error en este
ejercicio
x f(x)
0 3.141592654
0.5 3.546563582
1 4.908738521
1.5 7.669903939
2 12.56637061](https://image.slidesharecdn.com/ebookjaimecasales-170518084452/85/Ebook-jaime-casales-27-320.jpg)