Descargado 24 veces





![Algoritmo de Punto Fijo function [x,iter,incr] = pfijo(g,x0,tol, maxiter) iter = 0; incr = tol + 1; while incr > tol & iter < maxiter x = feval(g,x0); incr = norm(x - x0); iter = iter + 1; x0 = x; end if incr > tol, disp(‘No converge’), end](https://image.slidesharecdn.com/practsnl-120109102406-phpapp02/85/Pract_senl-7-320.jpg)







![Algoritmo de Newton function [x,iter,incr] = newton(f,x,tol, maxiter) iter = 0; incr = tol+1; while incr > tol & iter < maxiter [fx,dfx] = feval(f,x); delta = - dfx \ fx; incr = norm(delta); iter = iter+1; x = x + delta; end if incr>tol, disp(‘No converge’), end El archivo f.m evalúa la función y el jacobiano](https://image.slidesharecdn.com/practsnl-120109102406-phpapp02/85/Pract_senl-15-320.jpg)





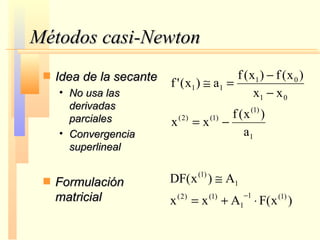









Este documento describe varios métodos numéricos para resolver sistemas de ecuaciones no lineales, incluyendo el método de punto fijo, el método de Newton, y los métodos cuasi-Newton como el método de Broyden. Explica los algoritmos de cada método, cómo calcular el jacobiano, y provee ejemplos numéricos para ilustrar su implementación.






























































