Descargar para leer sin conexión





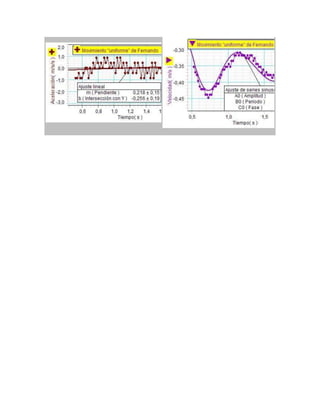

1) El documento describe experimentos realizados con un sensor de movimiento para familiarizarse con su funcionamiento. 2) Se analizan gráficas de posición-tiempo de objetos quietos y en movimiento para entender mejor cómo usar el sensor. 3) También se pide a estudiantes que realicen diferentes movimientos y se analizan las gráficas de posición, velocidad y aceleración obtenidas.















































