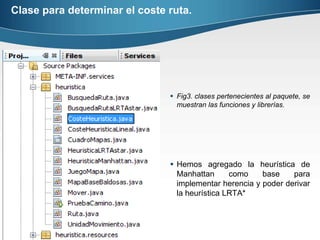
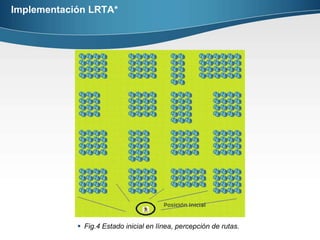
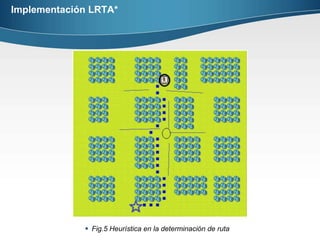
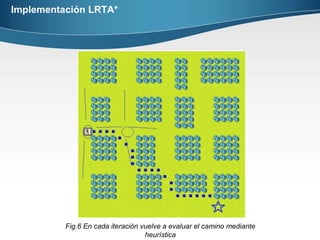
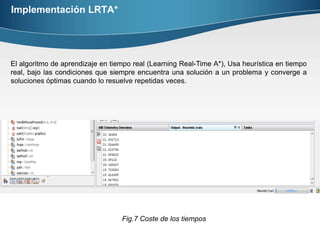
El documento describe la implementación del algoritmo LRTA* para un agente racional aplicado a la ciencia cognitiva. El agente aprende una función heurística admisible para estimar el costo del camino hacia el objetivo usando LRTA*. El algoritmo inicia una búsqueda A* y actualiza la heurística en cada iteración basado en el costo del movimiento detectado. El LRTA* siempre encuentra una solución y converge a soluciones óptimas al resolver el problema repetidamente.

![BIBLIOGRAFIA[1] [Russell Stuart, 2004] Peter Norving. INTELIGENCIA ARTIFICIAL. UN ENFOQUE MODERNO]. Pearson Educación. 2da. Edición. Madrid.[2] [Rodriguez Jorge. 2008]. INTRODUCCIÓN A LOS SISTEMAS DE VISIÓN ARTIFICIAL]. Disponible en http://www.scribd.com/doc/8343510/Vision-Artificial último acceso. Úlitmo acceso 30/01/2010.[3]Artificial Intelligence: A Modern Approach. [ Disponible en: http://aima.cs.berkeley.edu[4][Mira José, 2001] Delgado Esperanza, etc. ASPECTOS BÁSICOS DE LA INTELIGENCIA ARTIFICIAL. Editorial Sanz y Torres. Madrid. [5]Burns Alan, Wellings Andy. 2003]. SISTEMAS DE TIEMPO REAL Y LENGUAJES DE PROGRAMACIÓN. 3ra. Edición. Pearson Educación S.A. Madrid.[6] Malagón Constantino. 2003] SISTEMAS BASADOS EN CONOCIMIENTO. February 17, 2003. Disponible en: http://www.nebrija.es/~cmalagon/inco/Apuntes/sistemas_basados_en_conocimiento.pdf Úlitmo acceso 27/01/2010. [6] http://www.bloggadgets.es/1455/eye-stick-el-baston-para-no-videntes-con-sensor/[7] Hernandez Carlos, 2007]. Mejorando la convergencia en búsqueda heurística de tiempo real. Disponible en http://www.iiia.csic.es/~chernan/hernandezcarlos.doc Ültimo acceso 2/02/2010.[8] http://www.w3.org/RDF/Validator/](https://image.slidesharecdn.com/agenteiabastinimplementacionalgoritmo-100218170818-phpapp02/85/Implementacion-Algoritmo-LRTA-11-320.jpg)














































![Pci[con ejercicio de clases]](https://cdn.slidesharecdn.com/ss_thumbnails/pciconejerciciodeclases-100704112214-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)

![Pci[con ejercicio de clases]](https://cdn.slidesharecdn.com/ss_thumbnails/pciconejerciciodeclases-100704112705-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)


























