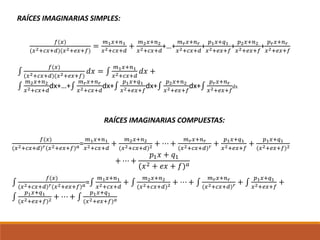
Este documento presenta diferentes métodos para calcular integrales indefinidas, incluyendo integrales inmediatas, el método de sustitución, integración por partes e integrales de funciones racionales. Explica cómo aplicar estos métodos para resolver integrales específicas y descomponer fracciones racionales en fracciones simples integrales.
![∫[f(x) + g(x)] dx =∫ f(x) dx +∫ g(x) dx
2. La integral del producto de una
constante por una función es igual a
la constante por la integral de la función.
∫ k f(x) dx = k ∫f(x) dx
Integrales indefinidas
∫ cos x dx = sen x +C
∫ 5cos x dx = 5⋅∫cosxdx = 5senx + c
∫dx = x +C
∫e 𝒙
dx = e 𝒙
+C](https://image.slidesharecdn.com/trabajomatematicamiguelgarrido-190322051931/85/INTEGRALES-MATEMATICA-II-Miguel-Garrido-4-320.jpg)
![Método de integración por partes
En el cálculo y en general en el análisis matemático, integración por partes es el
proceso que encuentra la integral de un producto de funciones en términos de la
integral de sus derivadas y anti derivadas.
Frecuentemente usado para transformar la anti derivada de un producto de
funciones en una anti derivada, por lo cual, una solución puede ser hallada más
fácilmente.
Sean u = u(x), v = v(x) dos funciones variables en un intervalo [a,b] (o en todo R).
Como d(u · v) = u · dv + v · du
de donde u · dv = d(u · v) - v · du
Integrando los dos miembros de la igualdad
∫u ⋅dv = ∫d(u ⋅v) − ∫v ⋅du⇒∫u ⋅dv = u ⋅v − ∫v⋅du
La expresión obtenida, denominada fórmula de integración por partes, se utiliza
para transformar una integral en otra. Transformación que será útil como método de
integración cuando la integral del segundo miembro sea inmediata o, al menos, más
sencilla que la del primer miembro.](https://image.slidesharecdn.com/trabajomatematicamiguelgarrido-190322051931/85/INTEGRALES-MATEMATICA-II-Miguel-Garrido-8-320.jpg)