Descargado 384 veces



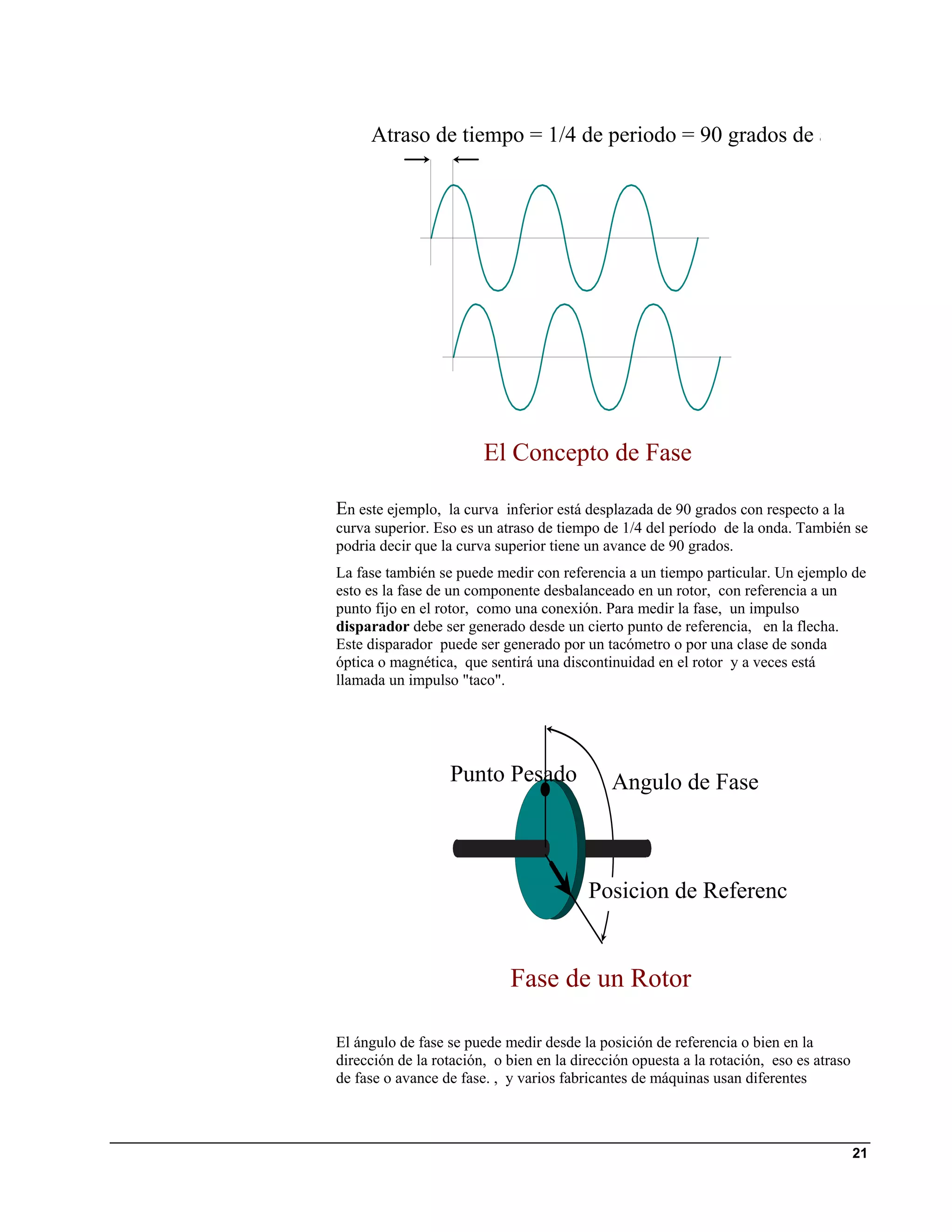
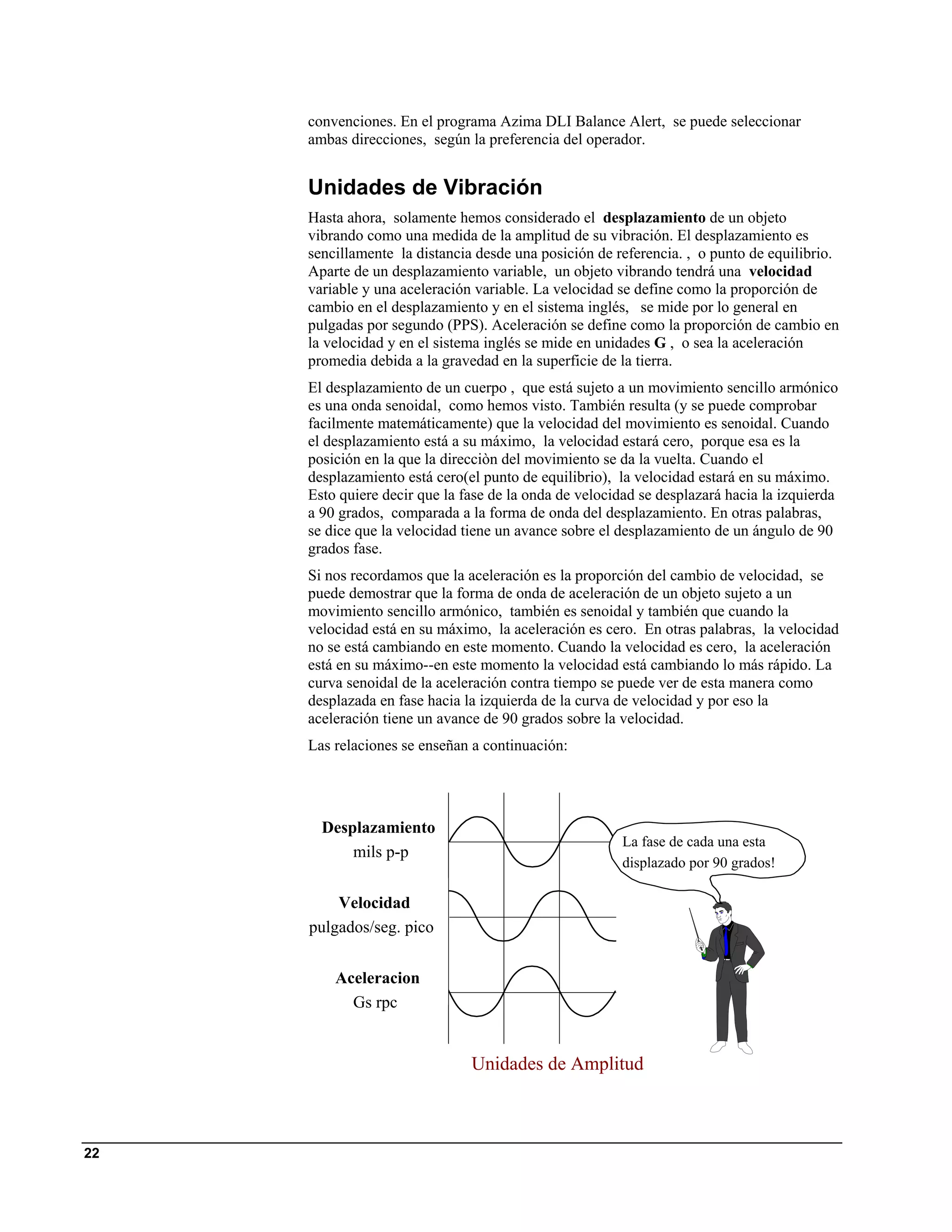
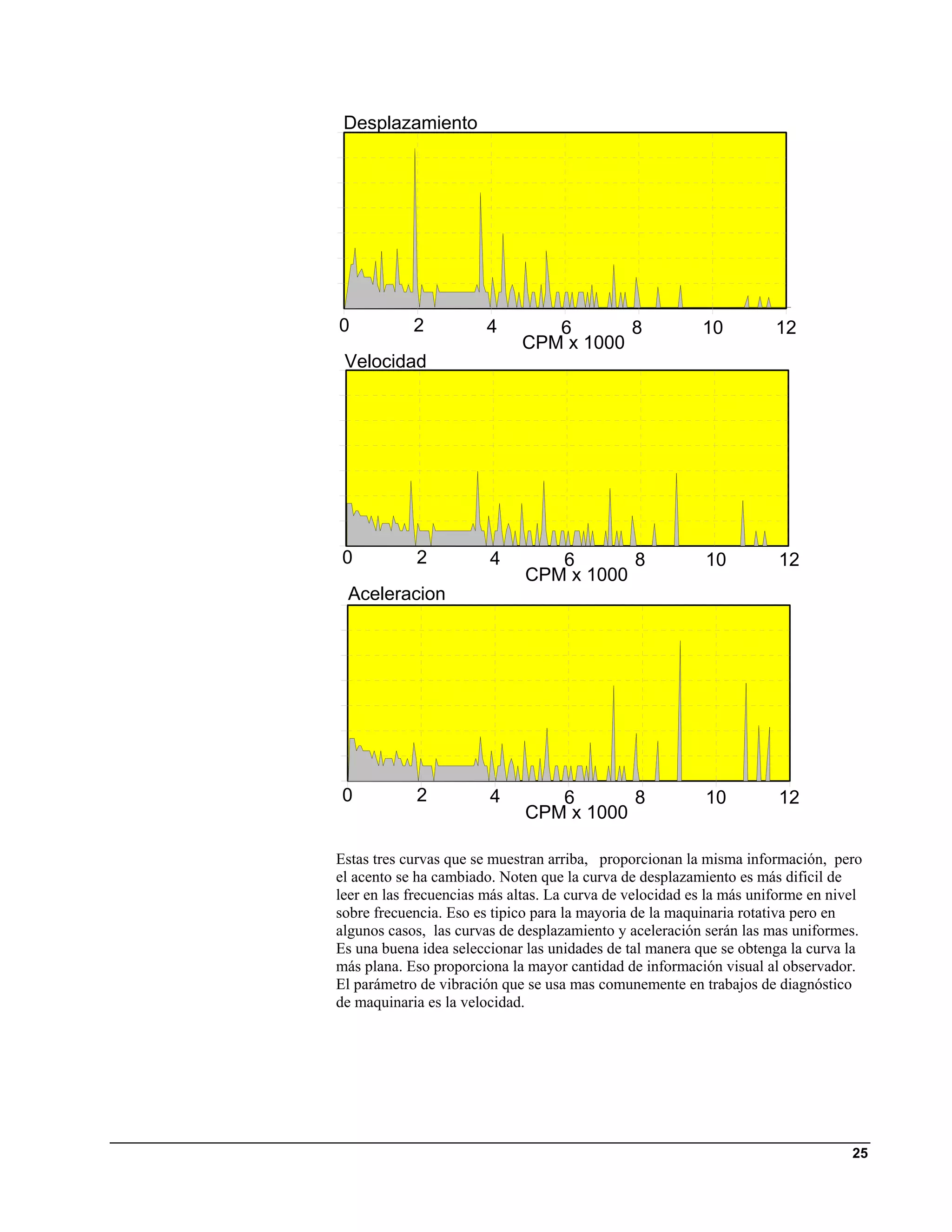
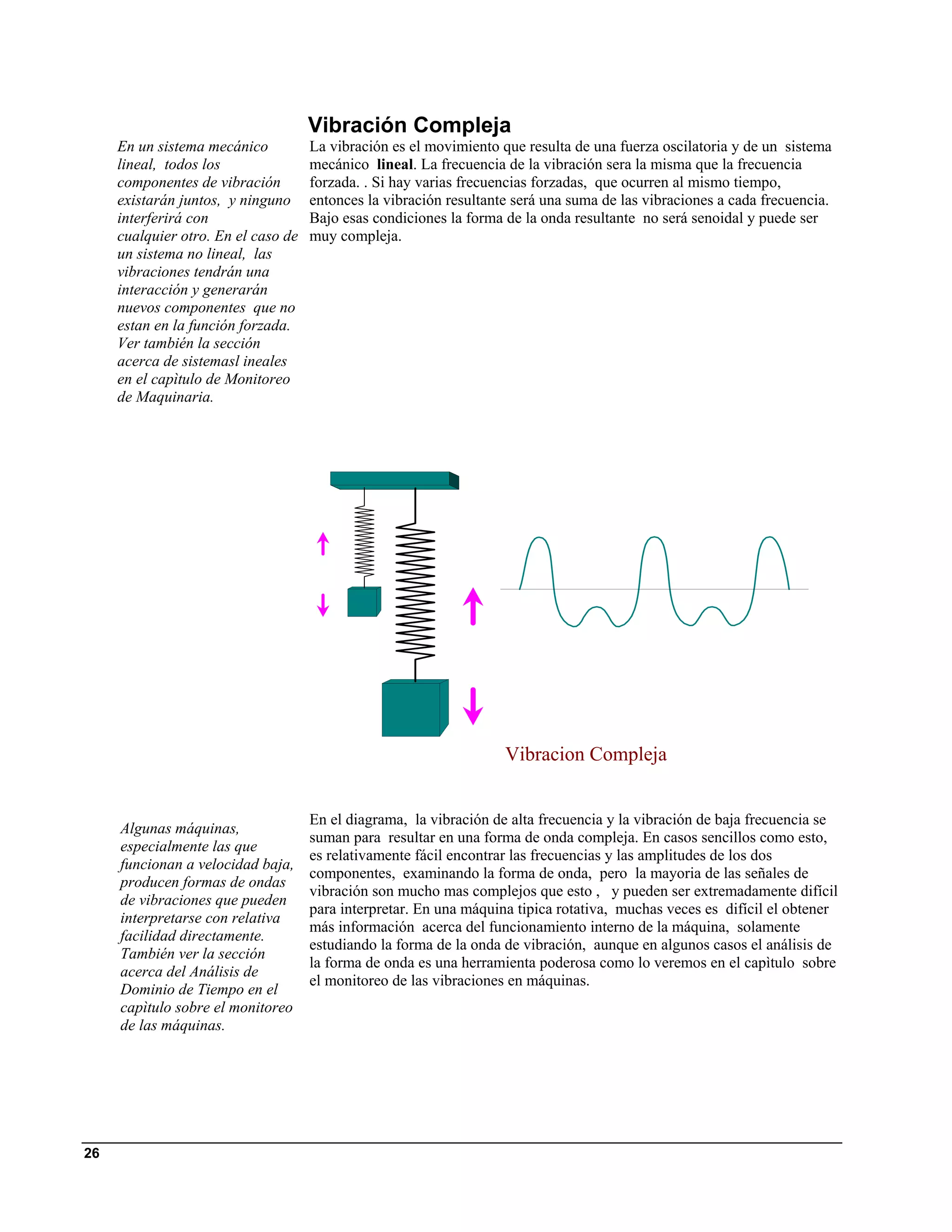

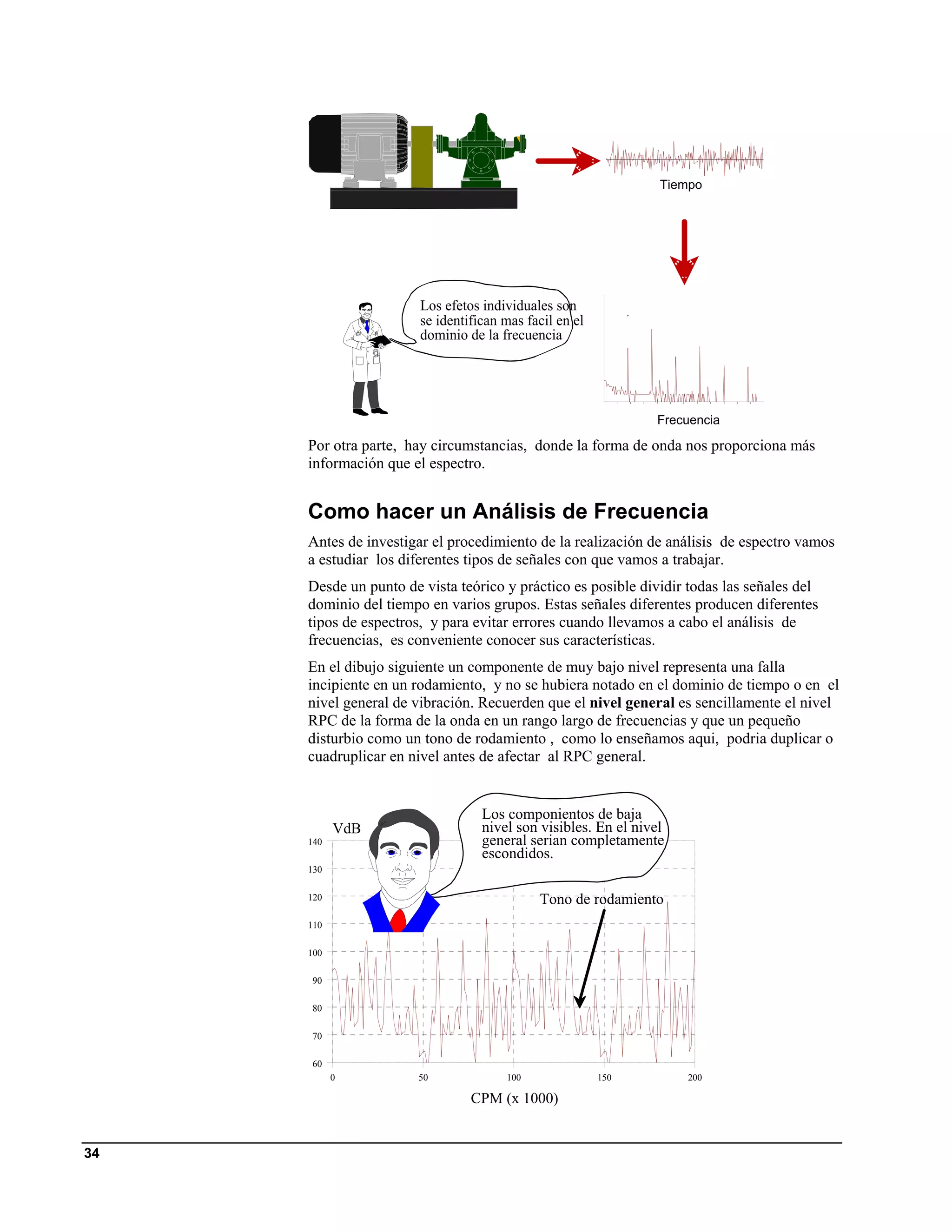
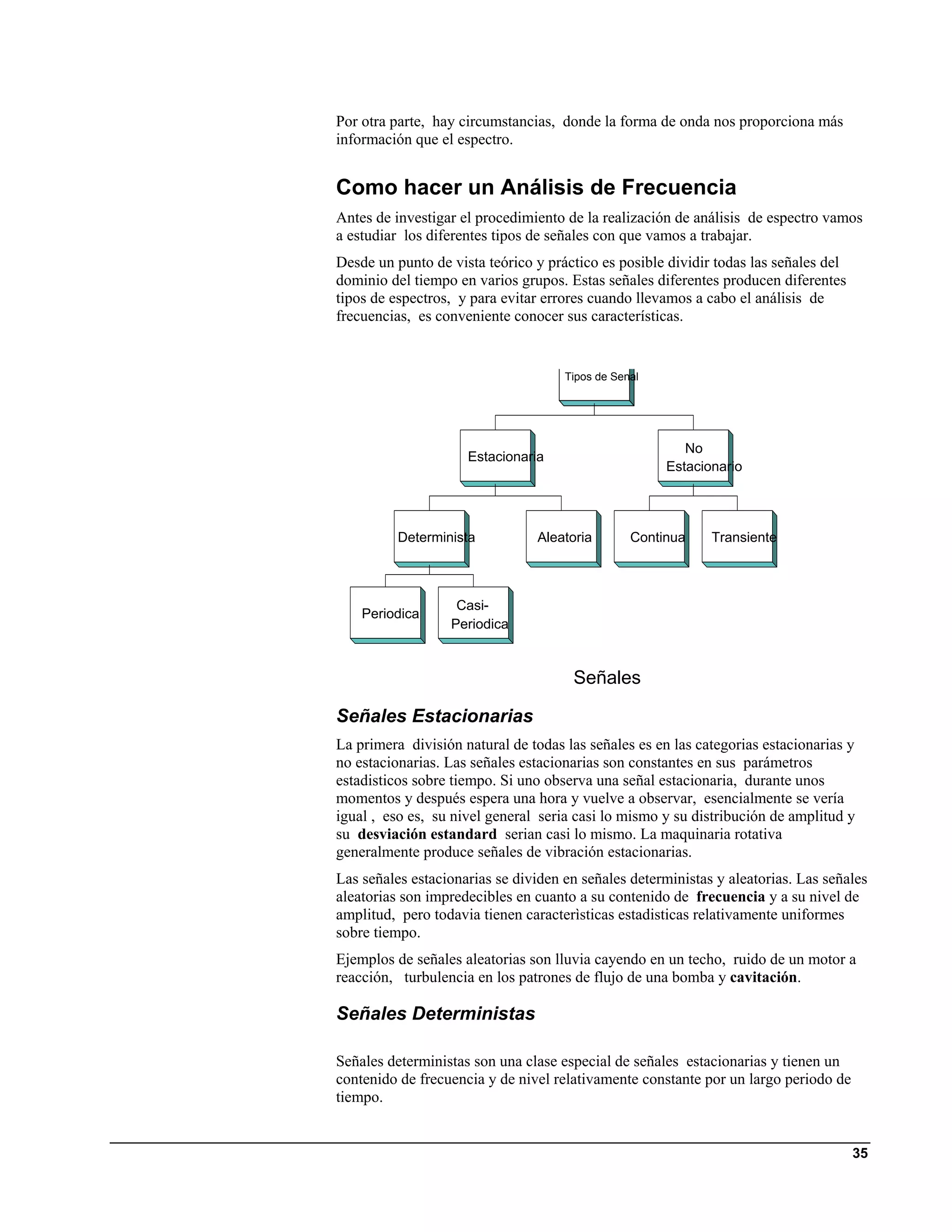
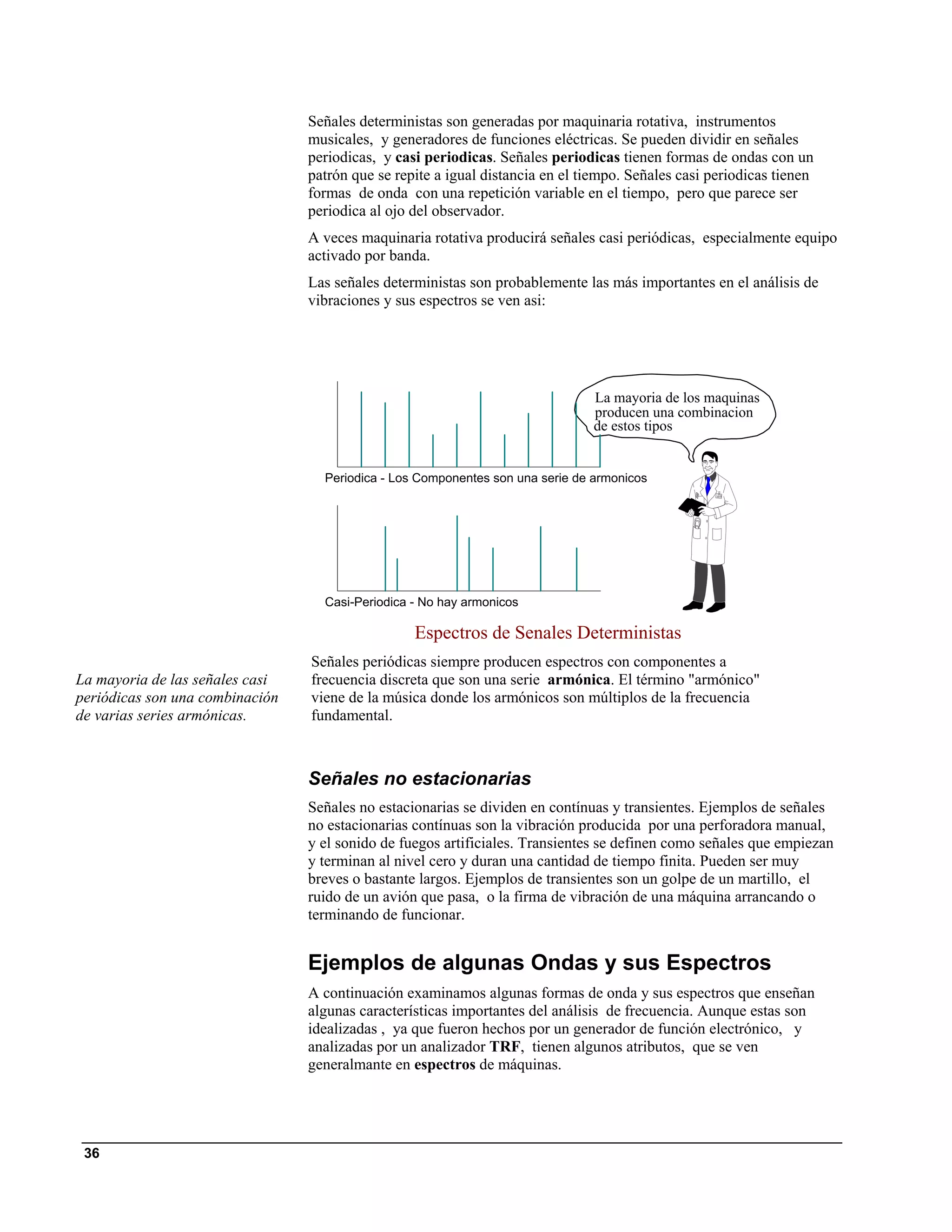
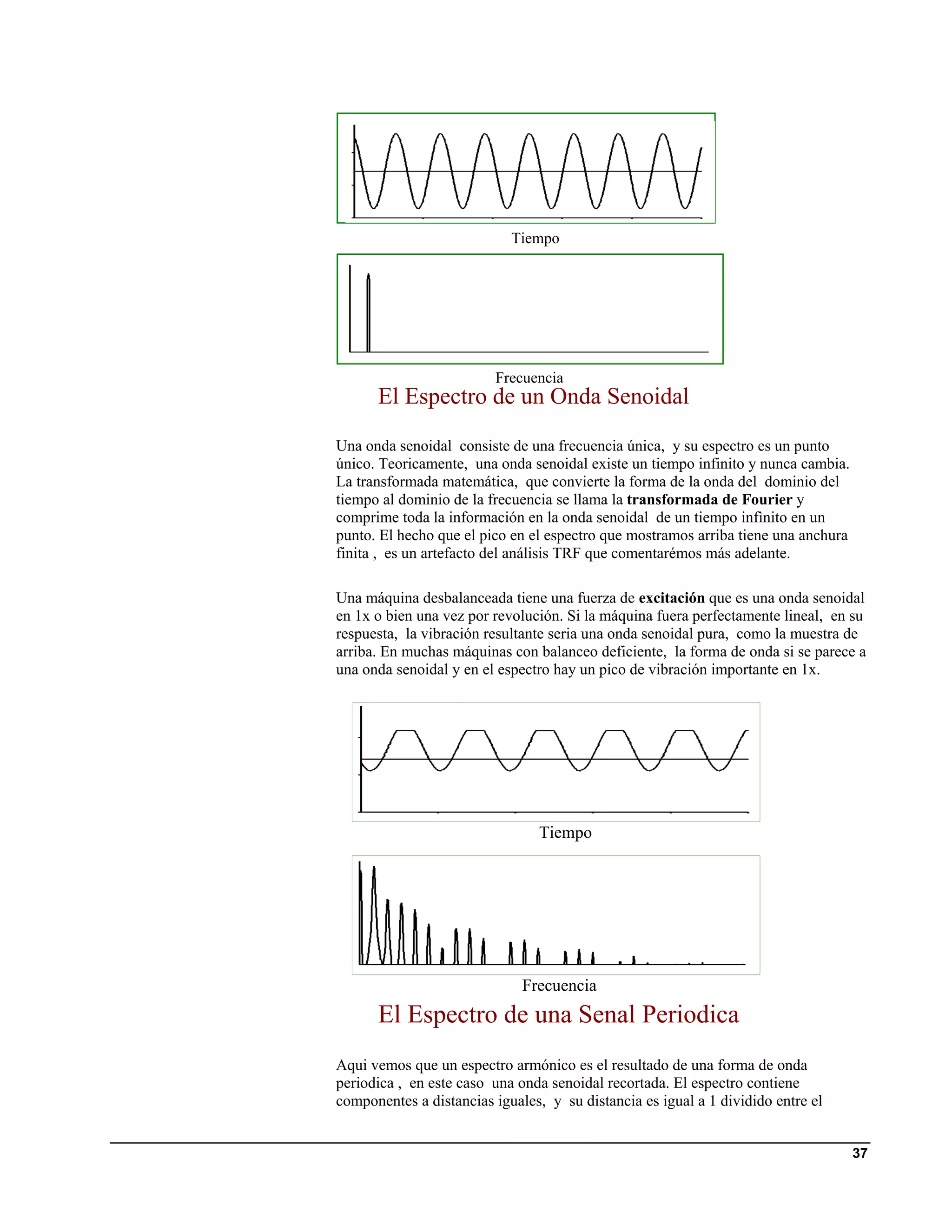

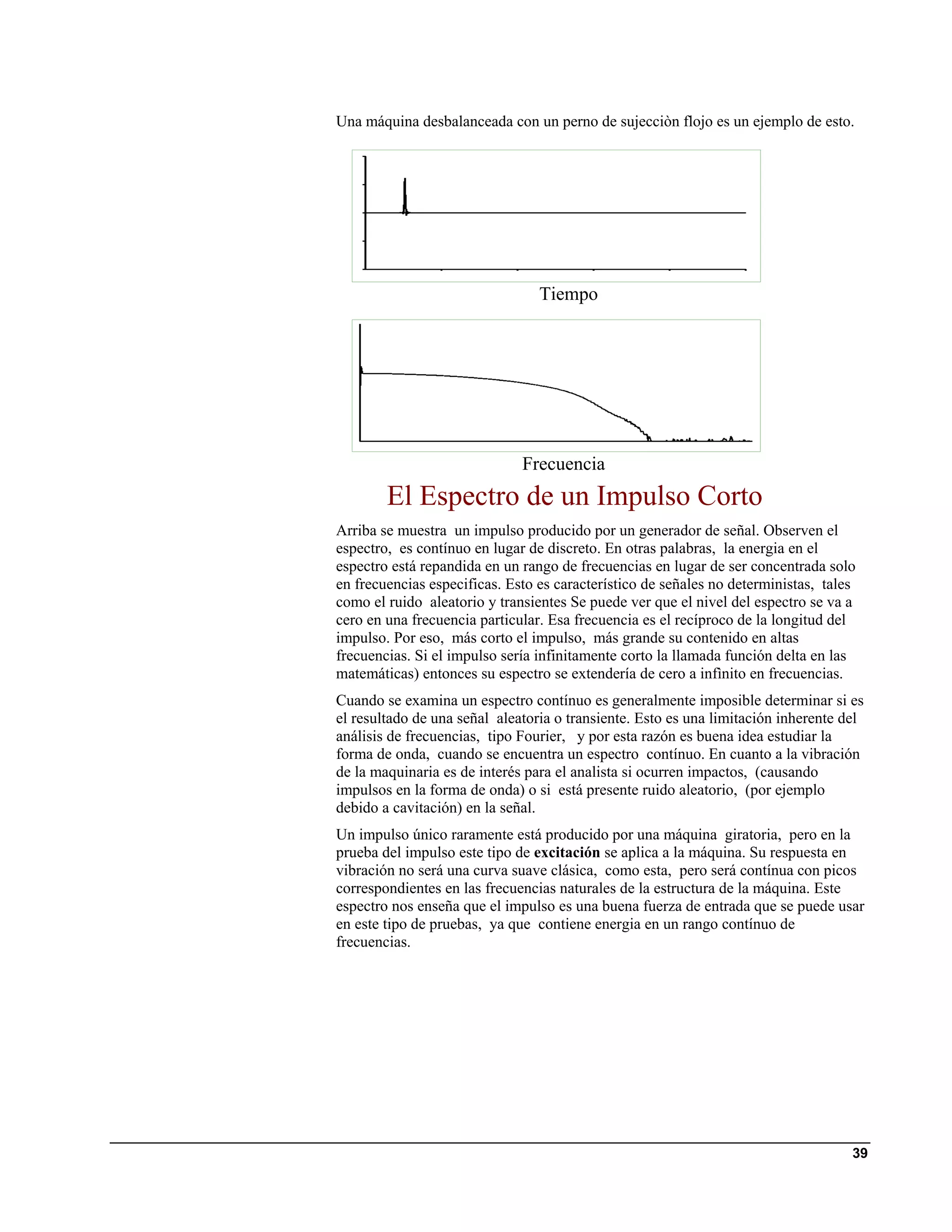

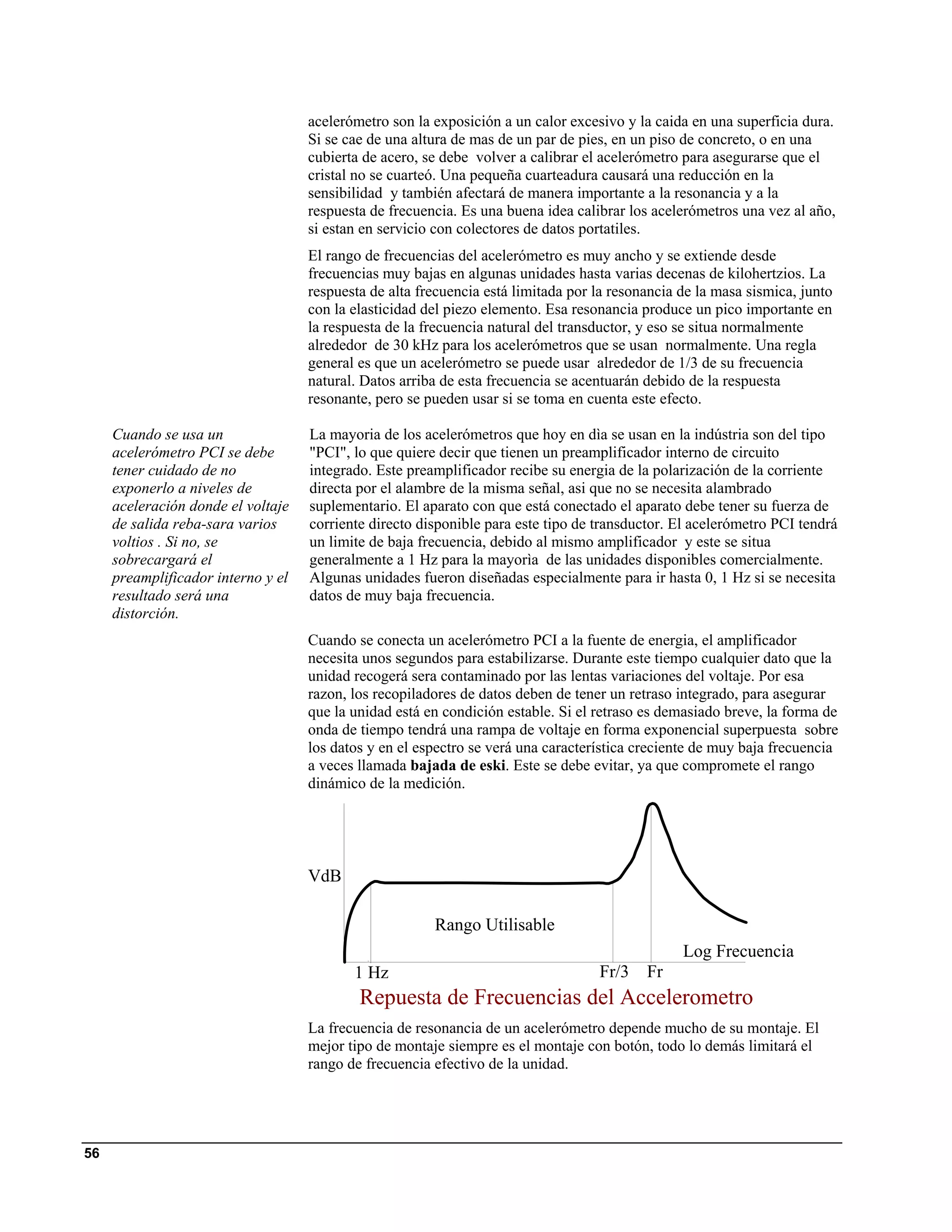


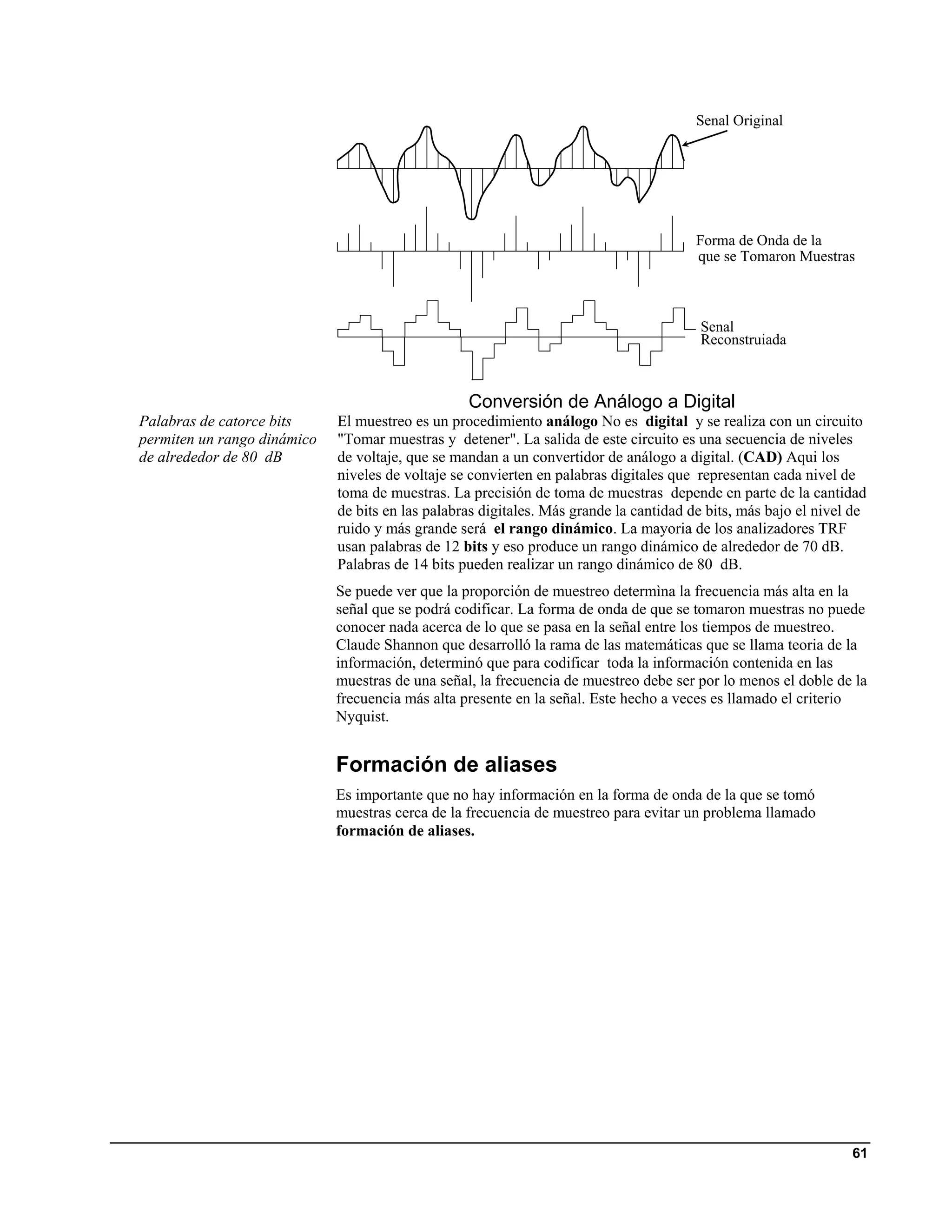
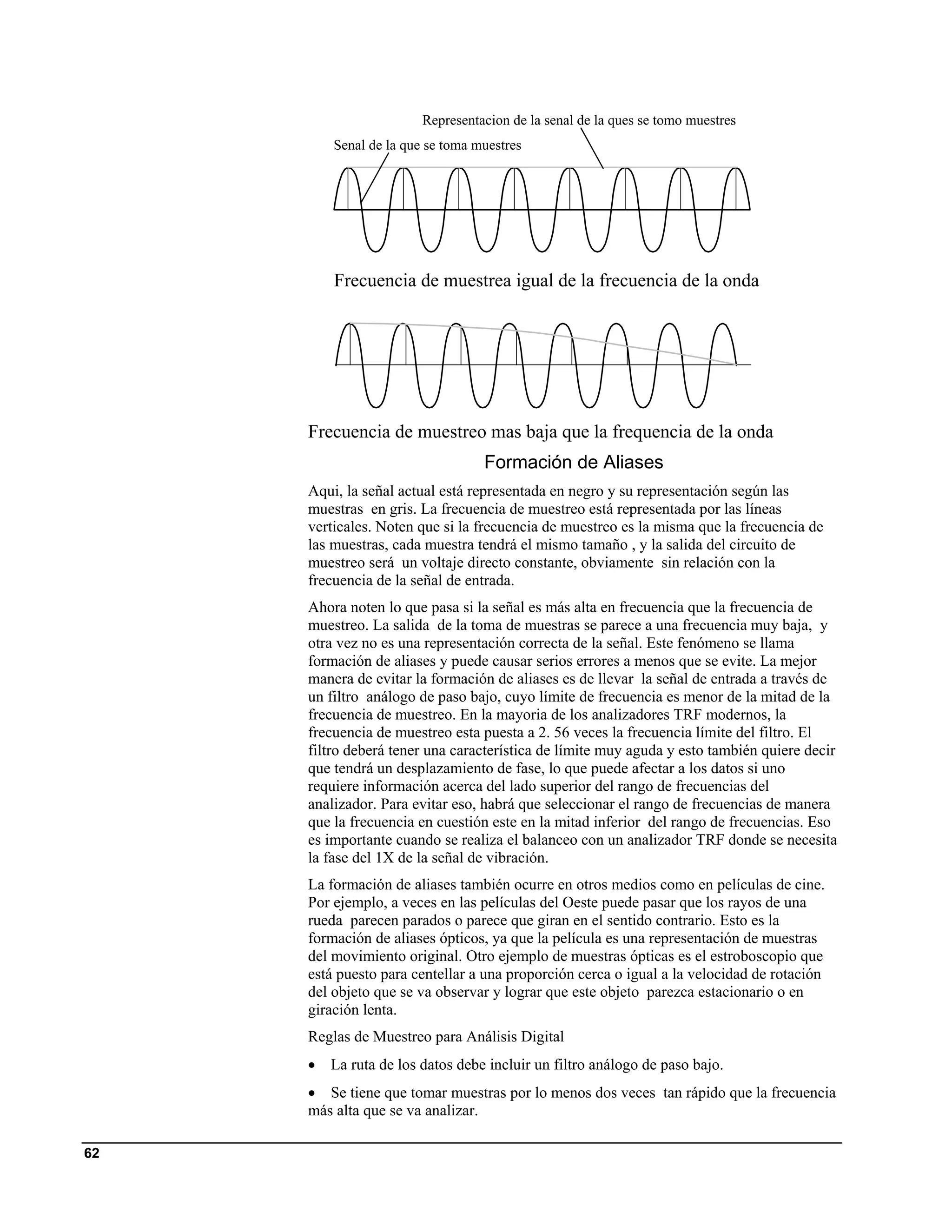
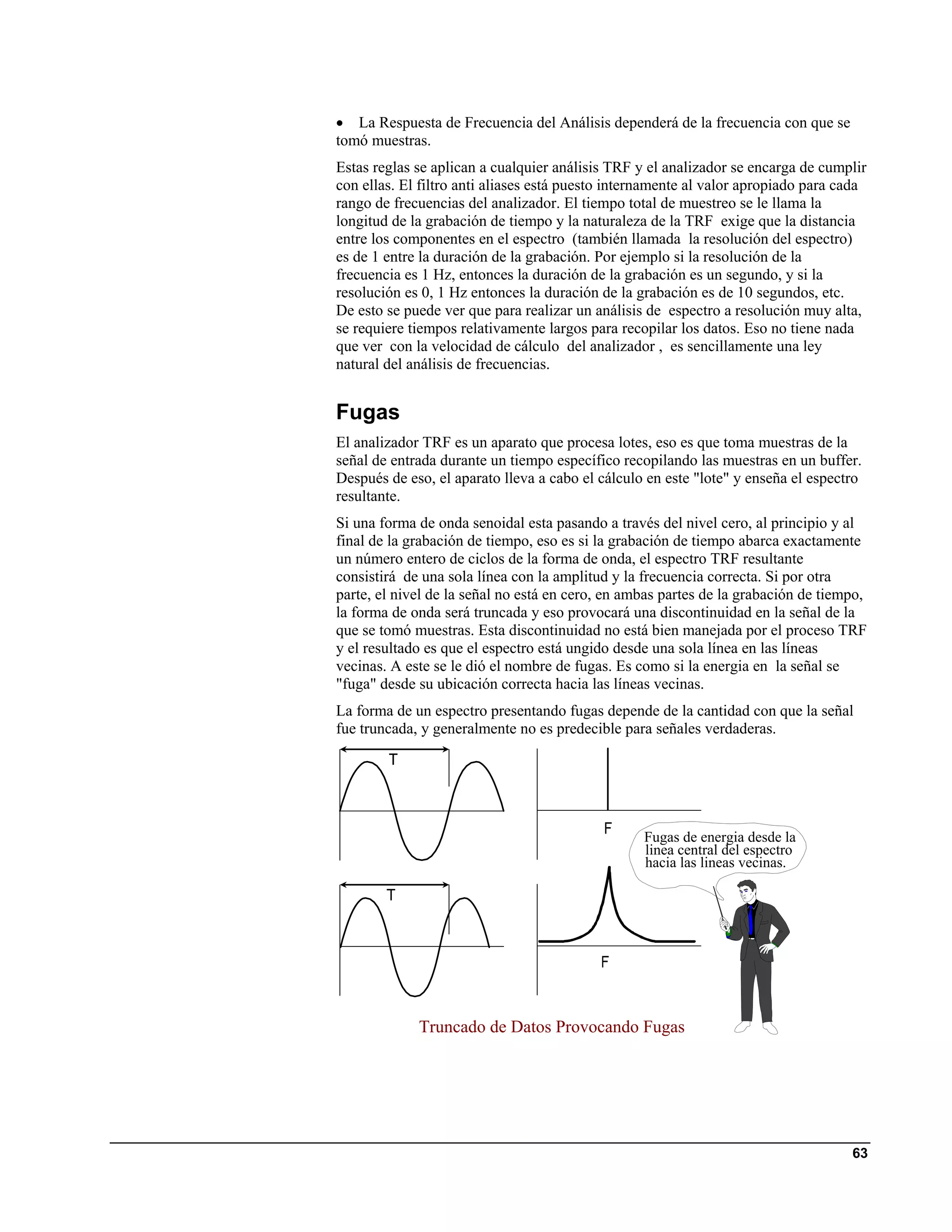
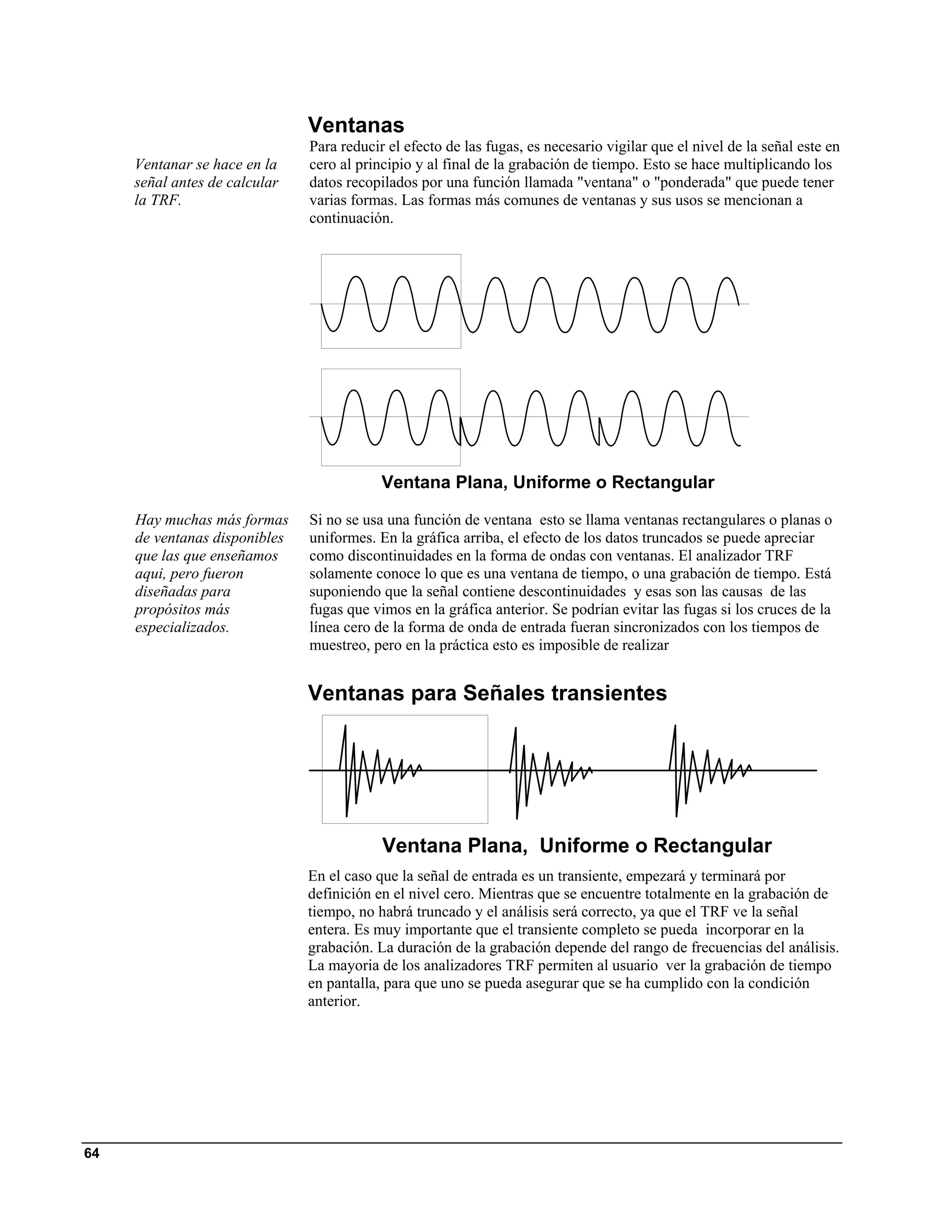
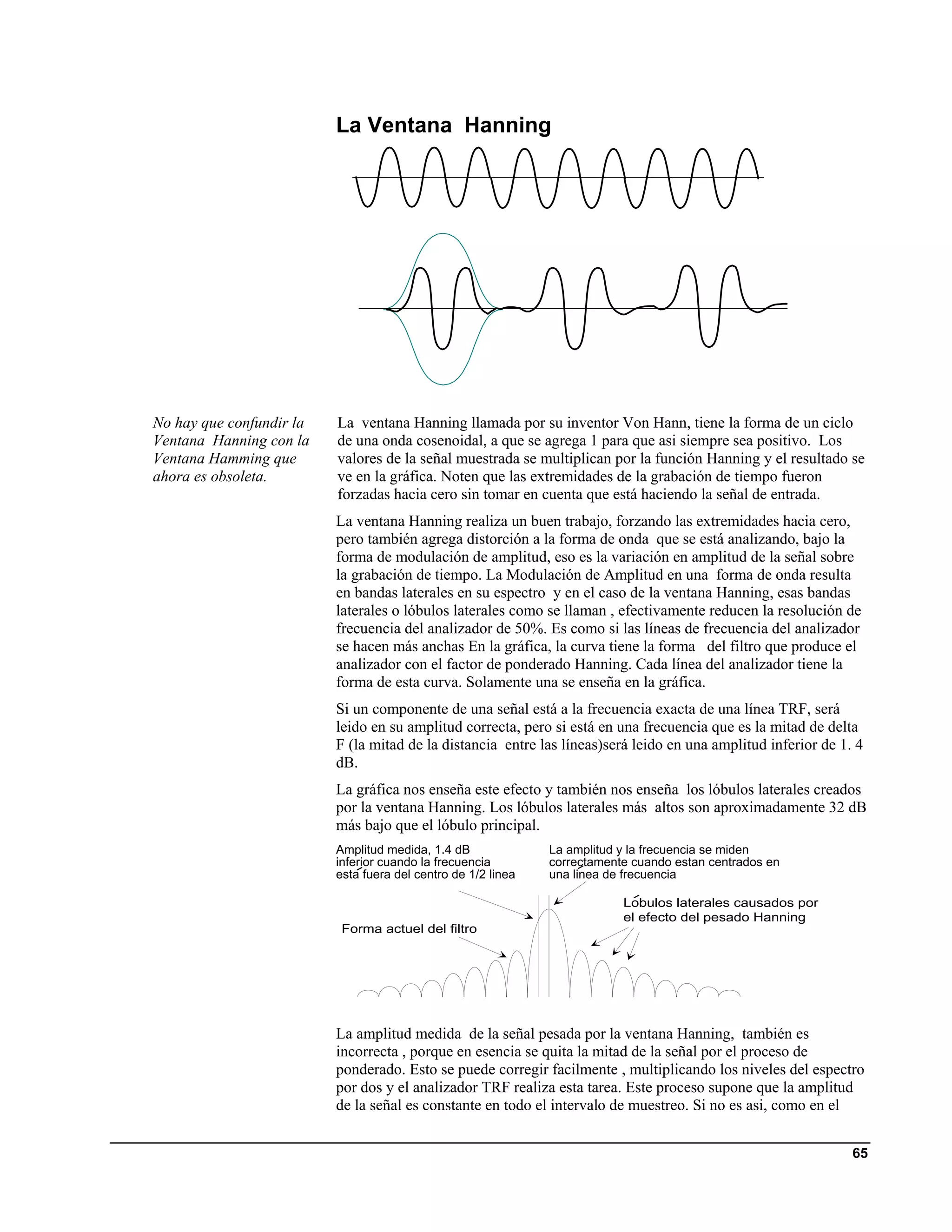
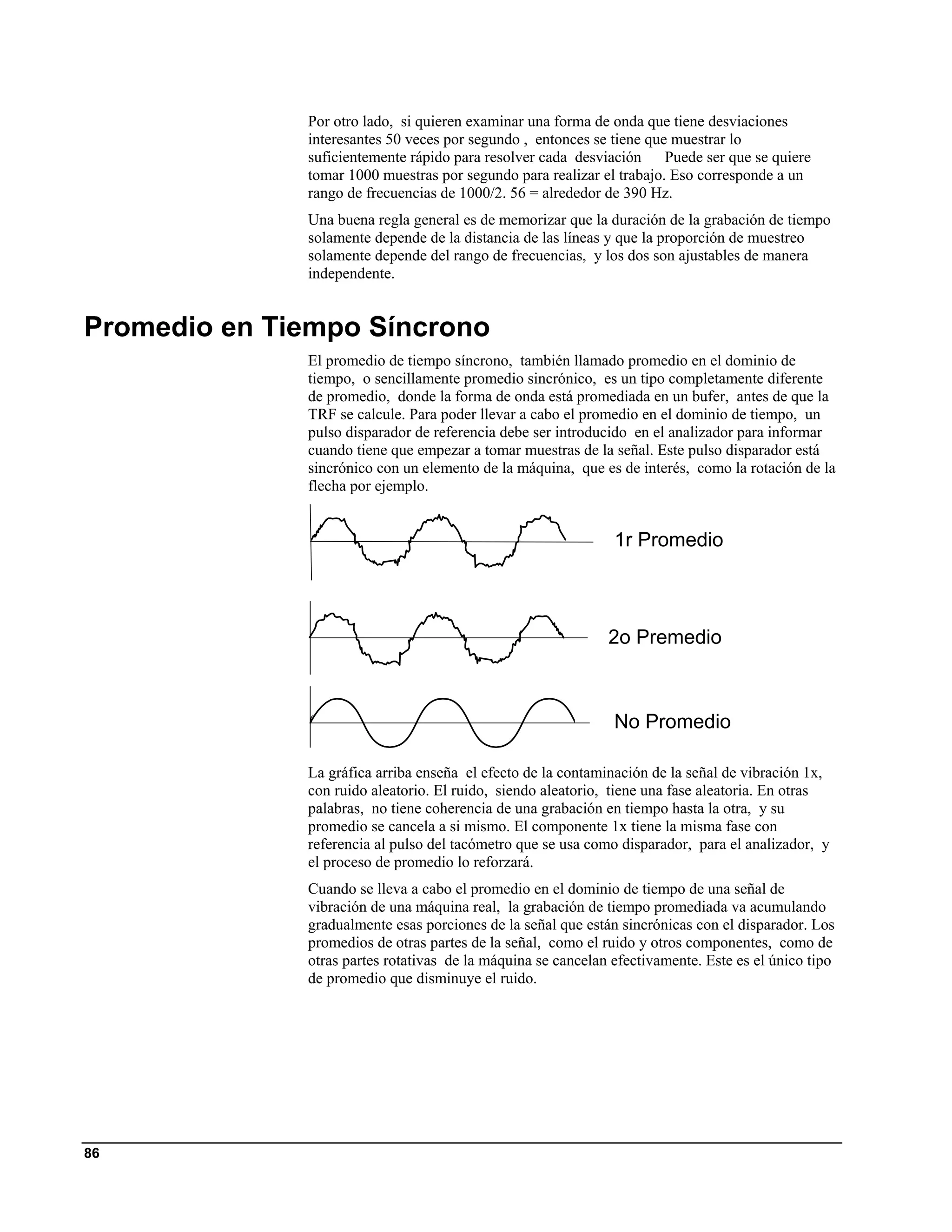
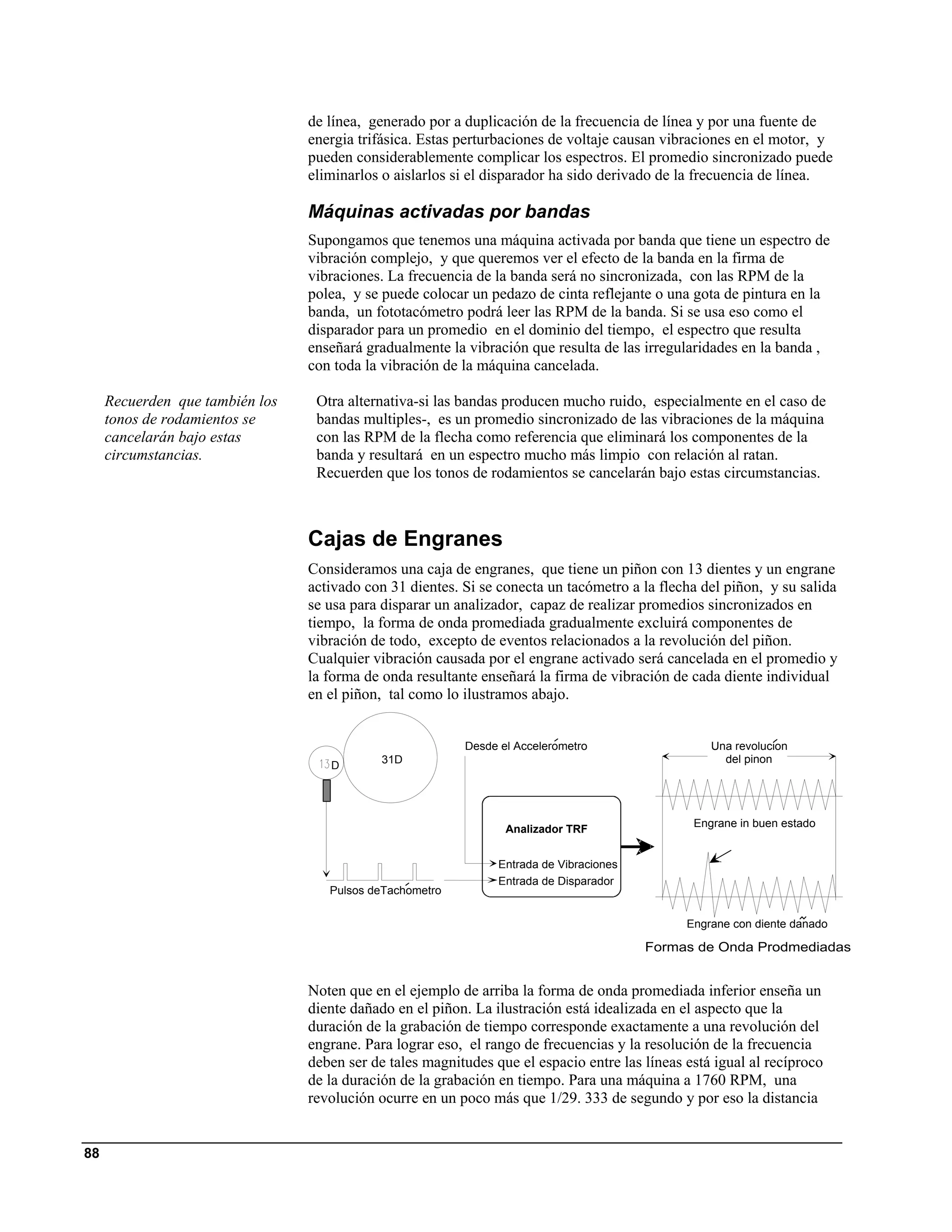
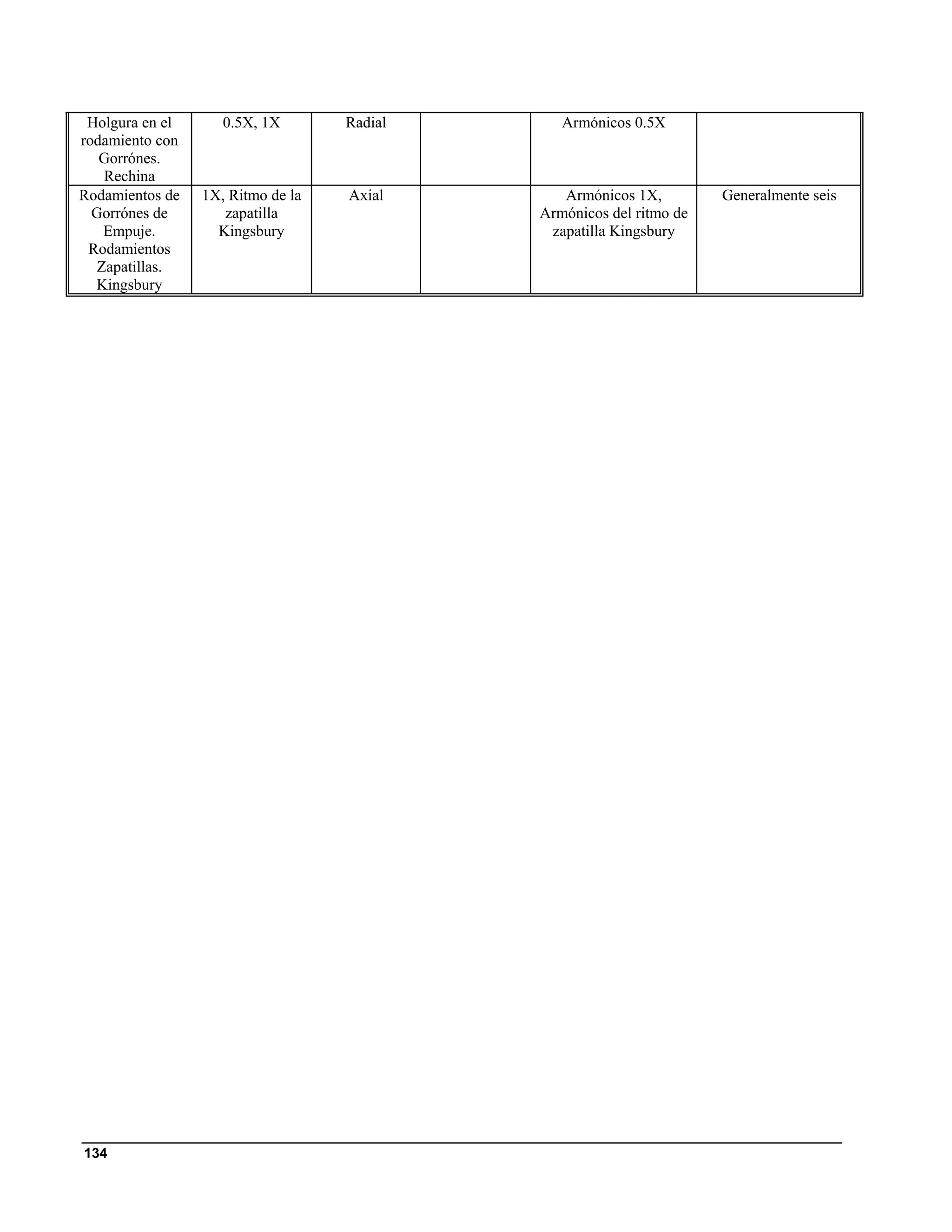
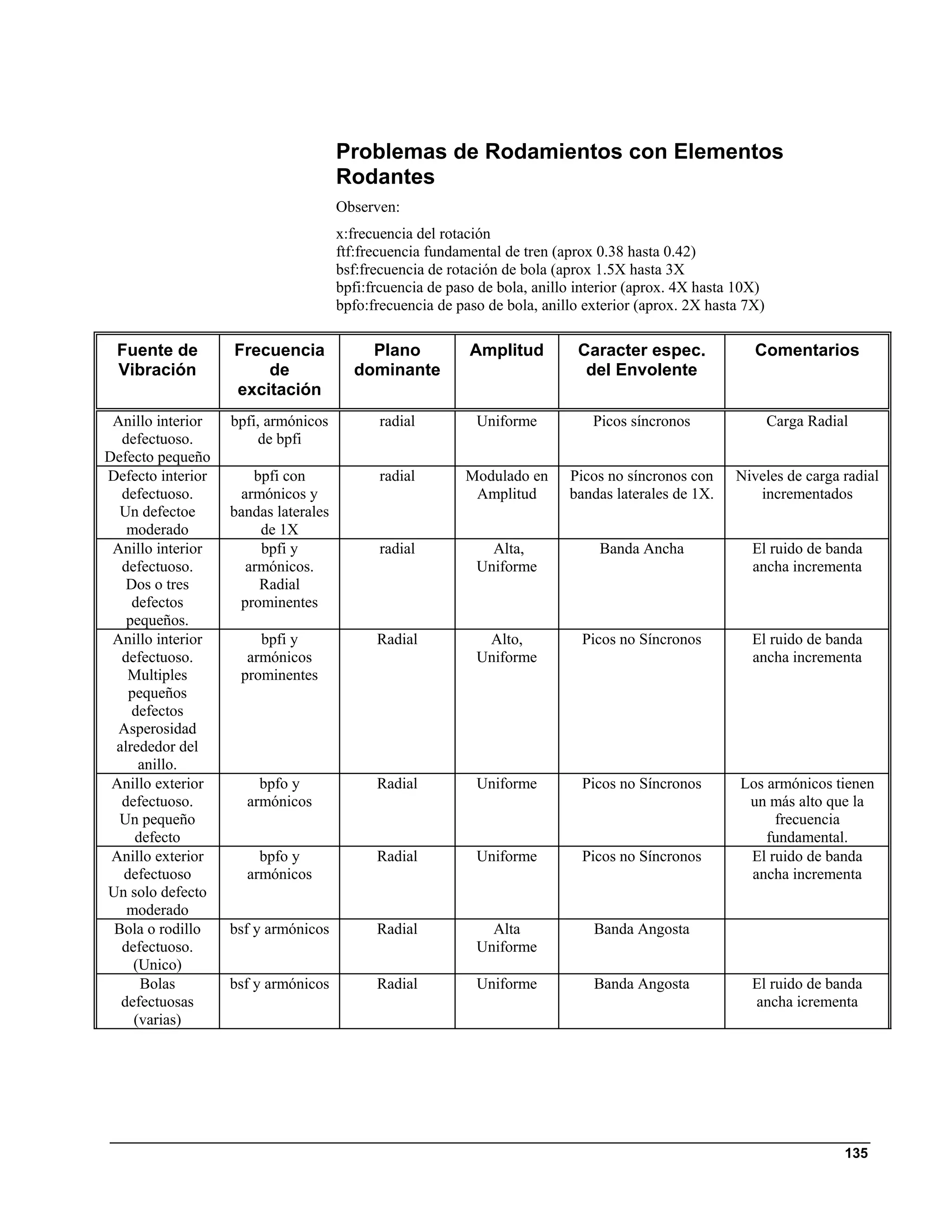
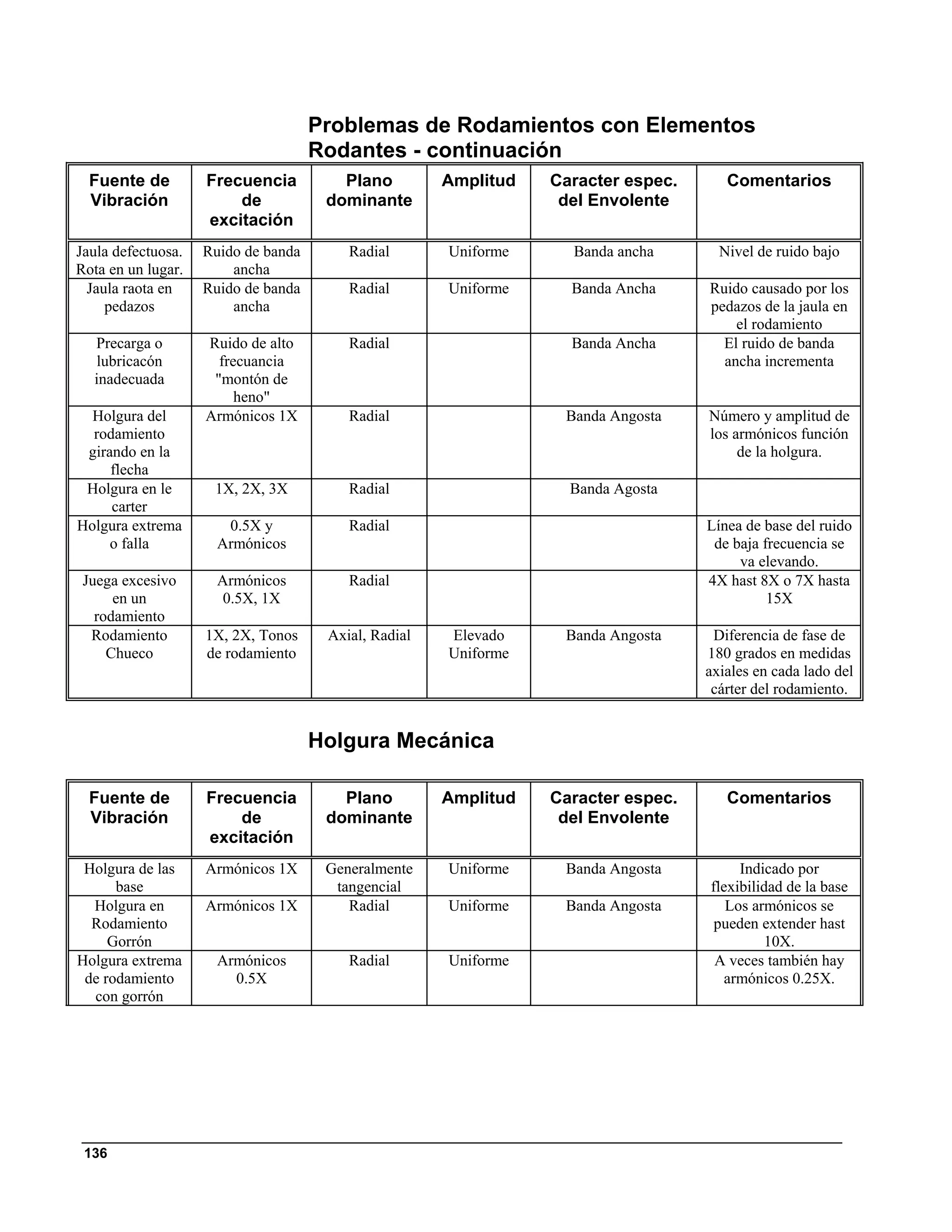
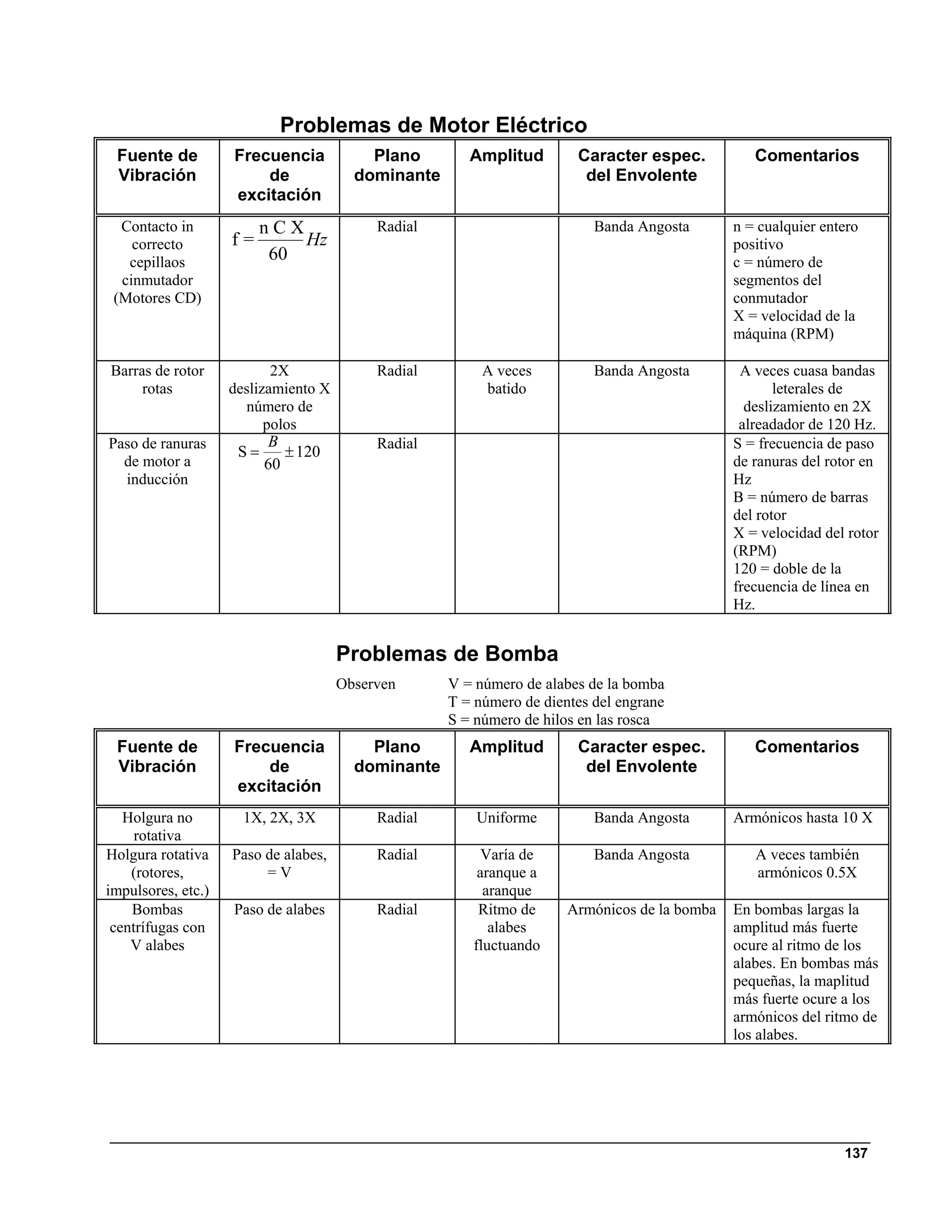
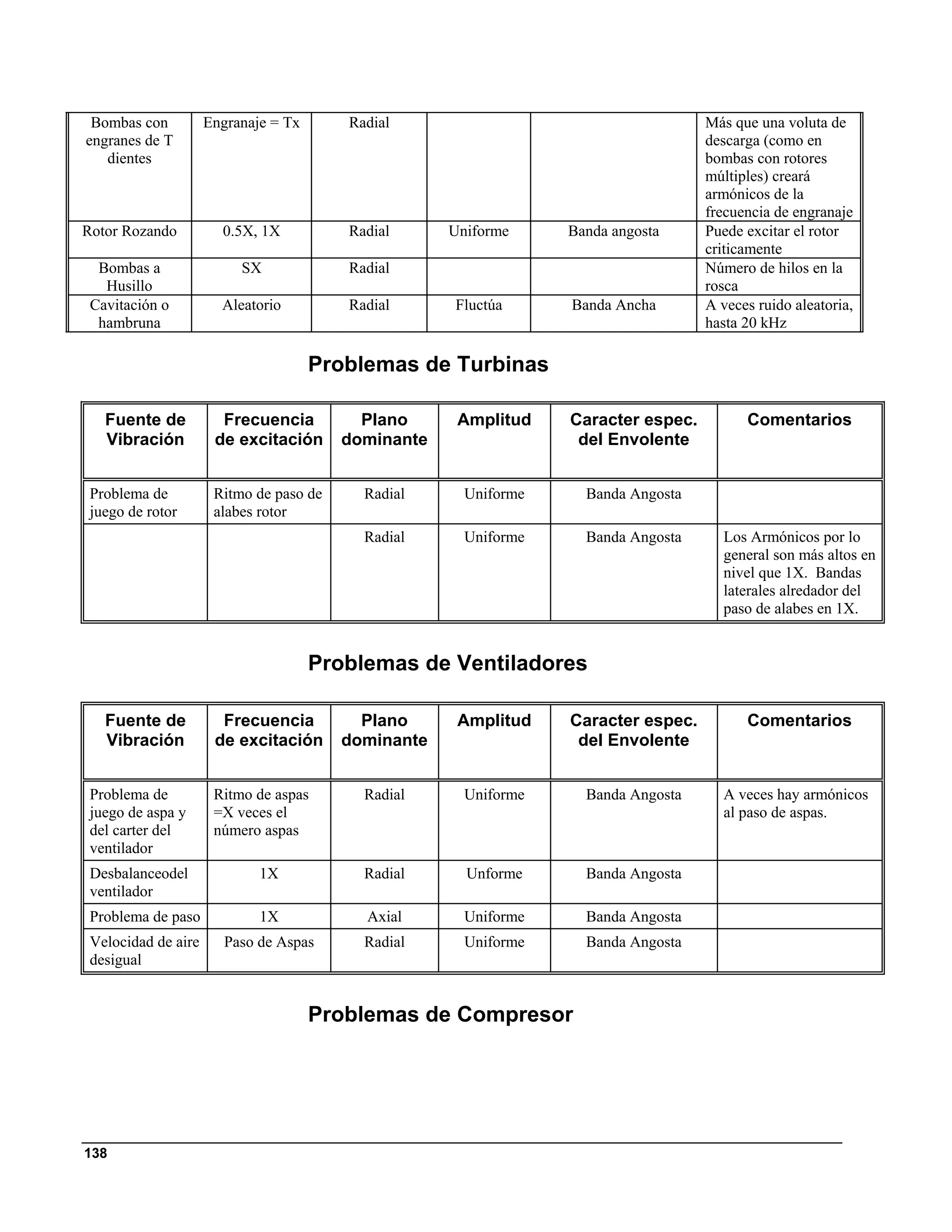
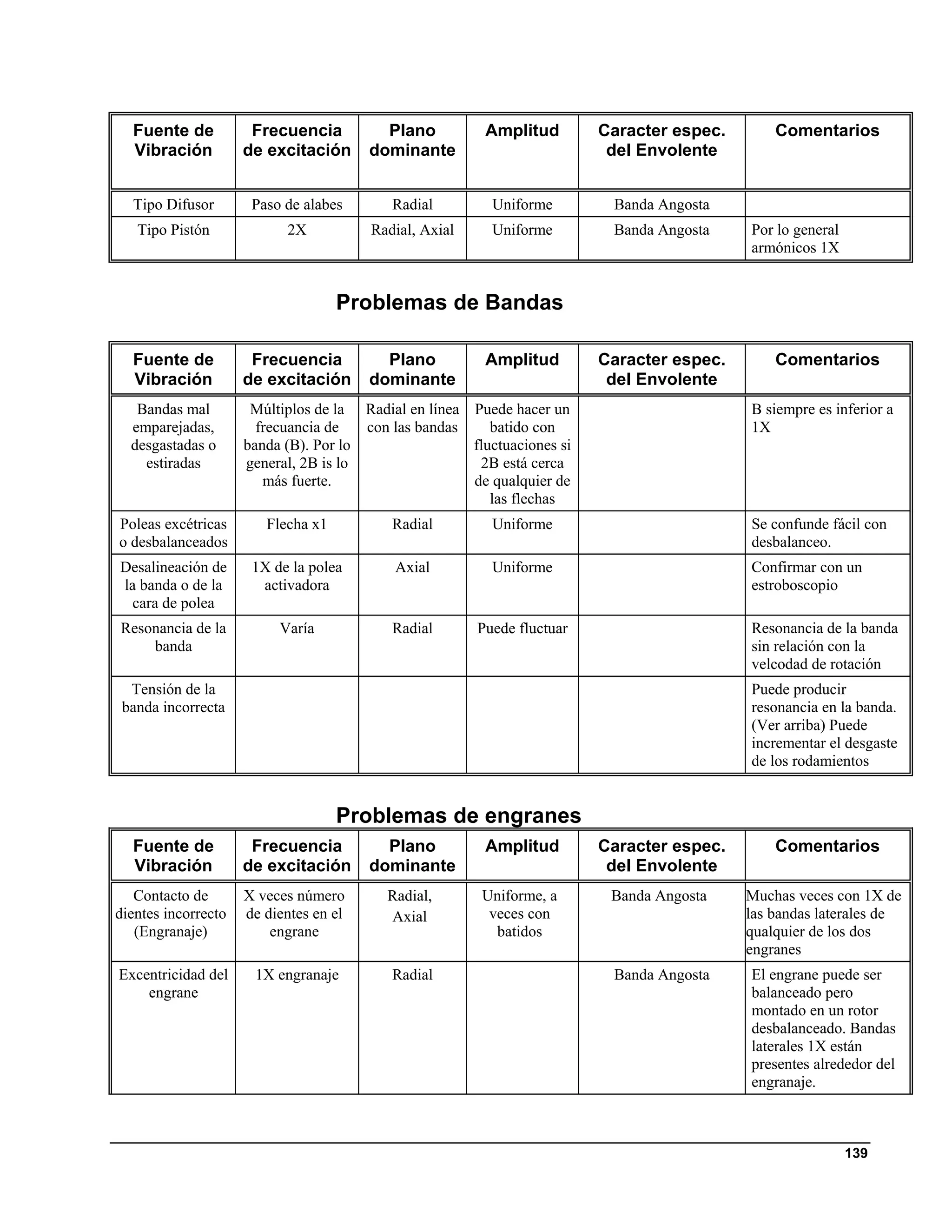
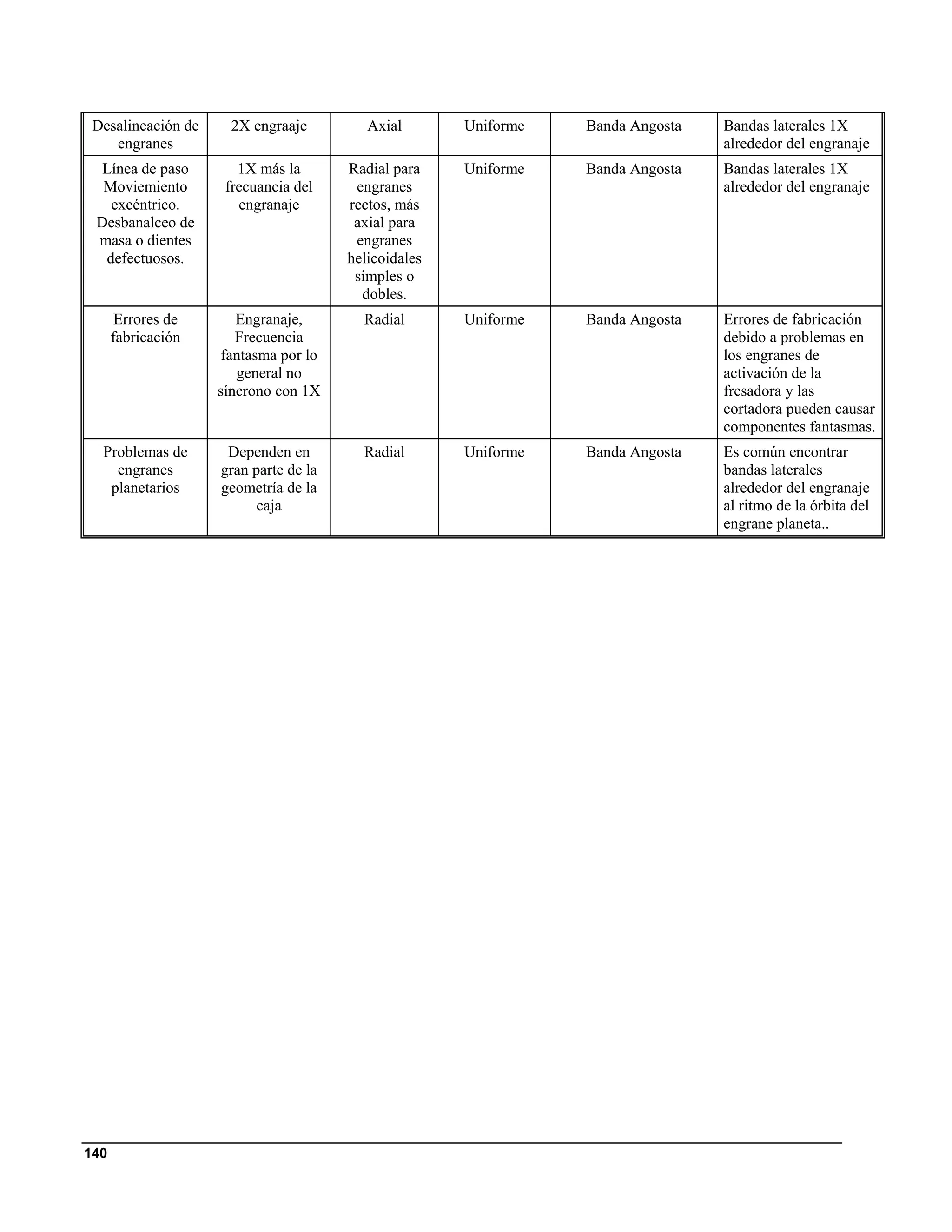
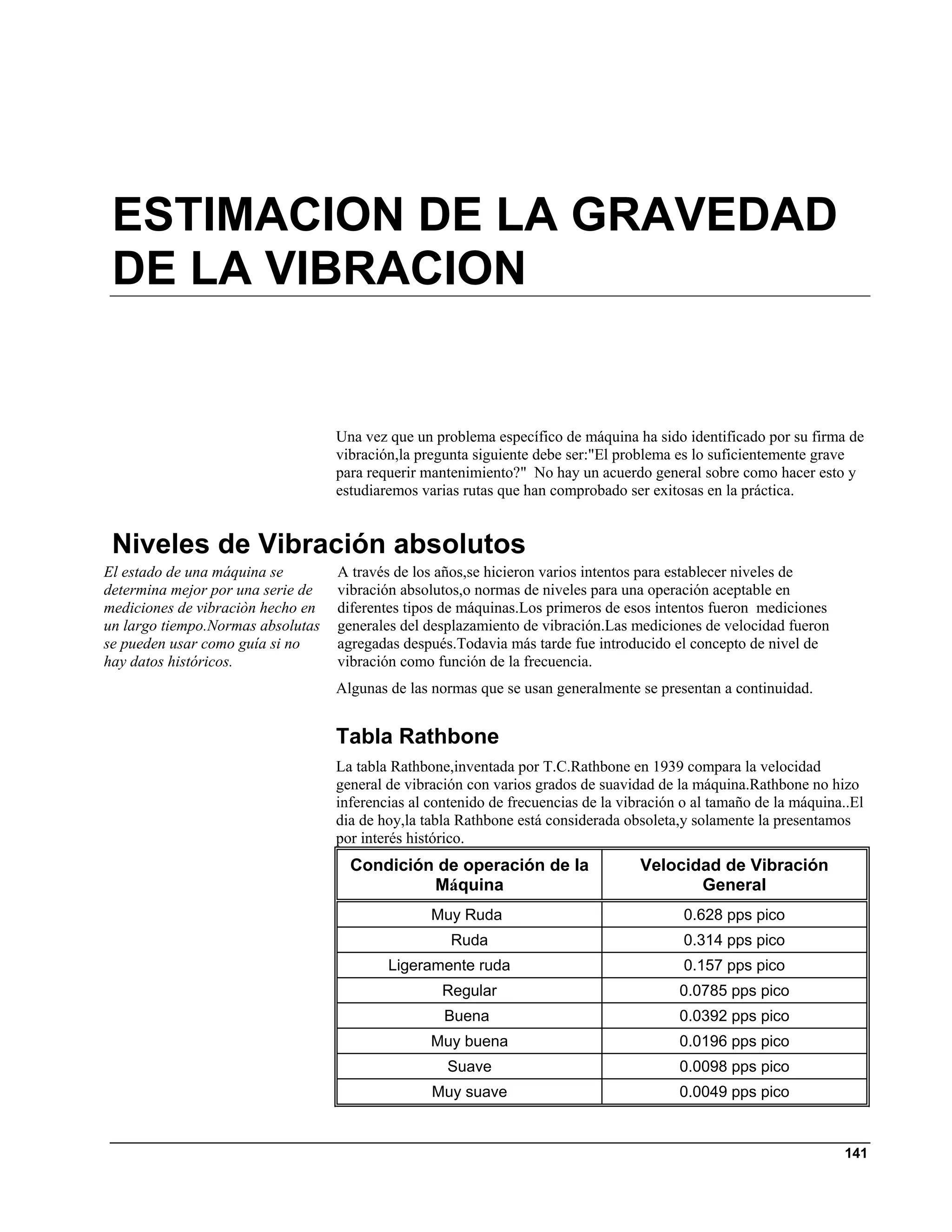


Este documento proporciona una introducción al análisis de vibraciones. Explica conceptos clave como movimiento armónico simple, ecuaciones de movimiento, frecuencias naturales y resonancia. También describe diferentes tipos de transductores de vibración, como sensores de proximidad, velocidad y acelerómetros. Finalmente, cubre temas relacionados con el análisis espectral de señales como la transformada de Fourier y el uso de ventanas y promediado.