Este documento describe el manejo de un teclado matricial 4x4 con un PIC16F84A. Las filas del teclado se conectan a las líneas RB0-RB3 del PIC y se configuran como salidas, mientras que las columnas se conectan a las líneas RB4-RB7 y se configuran como entradas. Se realiza un barrido de las filas para detectar qué tecla fue pulsada basándose en los niveles de voltaje de las columnas. La librería incluida proporciona subrutinas para inicializar el
(PROYECTO) Límites entre el Arte, los Medios de Comunicación y la Informáticavazquezgarciajesusma
En este proyecto de investigación nos adentraremos en el fascinante mundo de la intersección entre el arte y los medios de comunicación en el campo de la informática.
La rápida evolución de la tecnología ha llevado a una fusión cada vez más estrecha entre el arte y los medios digitales, generando nuevas formas de expresión y comunicación.
Continuando con el desarrollo de nuestro proyecto haremos uso del método inductivo porque organizamos nuestra investigación a la particular a lo general. El diseño metodológico del trabajo es no experimental y transversal ya que no existe manipulación deliberada de las variables ni de la situación, si no que se observa los fundamental y como se dan en su contestó natural para después analizarlos.
El diseño es transversal porque los datos se recolectan en un solo momento y su propósito es describir variables y analizar su interrelación, solo se desea saber la incidencia y el valor de uno o más variables, el diseño será descriptivo porque se requiere establecer relación entre dos o más de estás.
Mediante una encuesta recopilamos la información de este proyecto los alumnos tengan conocimiento de la evolución del arte y los medios de comunicación en la información y su importancia para la institución.
Actualmente, y debido al desarrollo tecnológico de campos como la informática y la electrónica, la mayoría de las bases de datos están en formato digital, siendo este un componente electrónico, por tanto se ha desarrollado y se ofrece un amplio rango de soluciones al problema del almacenamiento de datos.
Inteligencia Artificial y Ciberseguridad.pdfEmilio Casbas
Recopilación de los puntos más interesantes de diversas presentaciones, desde los visionarios conceptos de Alan Turing, pasando por la paradoja de Hans Moravec y la descripcion de Singularidad de Max Tegmark, hasta los innovadores avances de ChatGPT, y de cómo la IA está transformando la seguridad digital y protegiendo nuestras vidas.
Índice del libro "Big Data: Tecnologías para arquitecturas Data-Centric" de 0...Telefónica
Índice del libro "Big Data: Tecnologías para arquitecturas Data-Centric" de 0xWord escrito por Ibón Reinoso ( https://mypublicinbox.com/IBhone ) con Prólogo de Chema Alonso ( https://mypublicinbox.com/ChemaAlonso ). Puedes comprarlo aquí: https://0xword.com/es/libros/233-big-data-tecnologias-para-arquitecturas-data-centric.html
3Redu: Responsabilidad, Resiliencia y Respetocdraco
¡Hola! Somos 3Redu, conformados por Juan Camilo y Cristian. Entendemos las dificultades que enfrentan muchos estudiantes al tratar de comprender conceptos matemáticos. Nuestro objetivo es brindar una solución inclusiva y accesible para todos.
1. MANEJO DE TECLADO 4x4 CON PIC 16F84A
--------------------------------------------------------------------------------------------------------------
-----------------------------------------
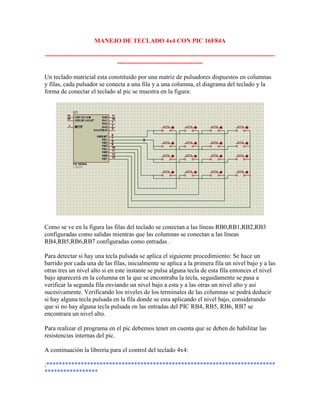
Un teclado matricial esta constituido por una matriz de pulsadores dispuestos en columnas
y filas, cada pulsador se conecta a una fila y a una columna, el diagrama del teclado y la
forma de conectar el teclado al pic se muestra en la figura:
Como se ve en la figura las filas del teclado se conectan a las líneas RB0,RB1,RB2,RB3
configuradas como salidas mientras que las columnas se conectan a las líneas
RB4,RB5,RB6,RB7 configuradas como entradas .
Para detectar si hay una tecla pulsada se aplica el siguiente procedimiento: Se hace un
barrido por cada una de las filas, inicialmente se aplica a la primera fila un nivel bajo y a las
otras tres un nivel alto si en este instante se pulsa alguna tecla de esta fila entonces el nivel
bajo aparecerá en la columna en la que se encontraba la tecla, seguidamente se pasa a
verificar la segunda fila enviando un nivel bajo a esta y a las otras un nivel alto y así
sucesivamente. Verificando los niveles de los terminales de las columnas se podrá deducir
si hay alguna tecla pulsada en la fila donde se esta aplicando el nivel bajo, considerando
que si no hay alguna tecla pulsada en las entradas del PIC RB4, RB5, RB6, RB7 se
encontrara un nivel alto.
Para realizar el programa en el pic debemos tener en cuenta que se deben de habilitar las
resistencias internas del pic.
A continuación la librería para el control del teclado 4x4:
;*************************************************************************
*****************
2. ;Librería para el control de un teclado matricial 4x4 ; que fue publicado en el libro titulado:
"Microcontrolador PIC16F84A
;"del ;autor: ENRIQUE PALACIOS, FERNANDO REMIRO, LUCAS LOPEZ
;TECLADO.inc
;*************************************************************************
*****************
cblock
TECL_TECLAORDEN
endc
TECL_ULTIMATECLA equ d'15'
TECLADO_LEEHEX
call TECLADO_LEEORDENTECLA
btfss STATUS,C
goto TECL_FINLEEHEX
call TECL_CONVIERTEORDENENHEX
bsf STATUS,C
TECL_FINLEEHEX
return
TECL_CONVIERTEORDENENHEX
addwf PCL,F
DT 1h,2h,3h,0Fh
DT 4h,5h,6h,0Eh
DT 7h,8h,9h,0Dh
DT 0Ah,0h,0Bh,0Ch
TECLADO_FINTABLEHEX
if(TECLADO_FINTABLEHEX> 0xFF)
ERROR "Atencion:la tabla a superado el tamño de la pagina de los "
MESSG "Primeros 256bytes de memoria rom, no funconara correctamente "
endif
TECLADO_INICIALIZA
bsf STATUS,RP0
movlw b'11110000'
movwf PORTB
bcf OPTION_REG,7
bcf STATUS,RP0
call TECLADO_ESPERADEJEPULSAR
return
TECLADO_COMPROBACION EQU b'11110000'
TECLADO_ESPERADEJEPULSAR
movlw TECLADO_COMPROBACION
movwf PORTB
TECLADO_SIGUEESPERANDO
call RETARDO_20MS
movf PORTB,W
sublw TECLADO_COMPROBACION
btfss STATUS,Z
4. Esta librería posee las siguientes subrutinas:
TECLADO_INICILIZA; que se encarga de configurar las líneas del puerto B para el uso
del teclado .
TECLADO_ESPERADEJEPULSAR; se mantiene en esta subrutina hasta que se deje de
pulsar un tecla.
TECLADO_LEEORDENTECLA; Lee el teclado obteniendo en el registro W el orden de la
tecla pulsada.
TECLADO_LEEHEX; Lee el teclado obteniendo en el registro W el valor hexadecimal de
la tecla pulsada
Se debe distinguir entre el orden de una tecla con su respectivo valor; el orden hace
referencia a la posición de la tecla, este será el mismo para cualquier teclado; mientras que
el valor hace referencia a la serigrafía del teclado que no es el mismo para todos.
Se activara una interrupción al encontrarse una tecla presinada.
APLICACION.-
Desarrollar un programa en el cual se visualice en un display el valor de la tecla pulsada.
Para lo cual haremos uso de las librerías : TECLADO.inc, RETARDOS.inc
5. La conexión del teclado, display, pic se muestran en la figura, se hace uso de el integrado
7448 para decodificar las salidas del puerto A, el programa es el siguiente:
;*************************************************************************
**
;AUTOR:CARLOS ALBERTO YACO TINCUSI
; programa que visualiza en un display de catodocomu el valor de la tecla pulsada en un
teclado 4x4
;fecha : 28-05-07
;*************************************************************************
**
list p=16f84a
include<P16F84A.inc>
cblock 0x0C
contador
endc
org 0
goto inicio
org 4
gotointerupcion
inicio
bsf STATUS,RP0
movlw b'00000000'
movwf PORTA
movlw b'11110000'
movlw PORTB
bcf STATUS,RP0
call TECLADO_INICIALIZA
movlw b'10001000'
movwf INTCON
principal
sleep
goto principal
interupcion
call TECLADO_LEEHEX
movwf contador
movlw d'10'
subwf contador,0
btfsc STATUS,C
clrf contador
movfw contador
movwf PORTA
call TECLADO_ESPERADEJEPULSAR
bcf INTCON,0
bsf INTCON,7
goto principal
6. include<RETARDOS.inc>
include<TECLADO.inc>
end
Al inicio del programa se hace la configuración del puerto A, así como se habilita la
interrupción por RBI, luego el pic se encuentra en un estado de bajo consumo (splep) hasta
el momento en que una tecla sea pulsada lo cual produce una interrupción entonces
llamamos a la subrutina TECLADO_LEEHEX la cual nos devuelve el valor de la tecla
pulsada, mostrando este valor por el PUERTO A, para después volver a habilitar la
interrupción por RBI, solo se muestran valores del 0-9 las demás teclas tales como
A,B,C,D,E,F nos dan el valor de cero.
Una imagen del resultado final:
La librería TECLADO.inc la pueden descargar de aquí.
El programa ejemplo también lo pueden descargar de aquí
Espero que les sirva de algo
7. CARLOS YACO
ELECTRONICA BASICA
Programa clase
LIST P = PIC16F84A
INCLUDE "P16F84A.INC"
INCLUDE "MACRO.INC"
CBLOCK 0X0C
TECLA
ENDC
ORG 0X00
KB_PORT BANK1
MOVLW B'11110000'
MOVWF TRISB
BCF OPTION_REG,NOT_RBPU
BANK0
RETURN
10. LIST P = PIC16F84A
INCLUDE "P16F84A.INC"
INCLUDE "MACRO.INC"
CBLOCK 0X0C
TECLA
ENDC
KB_Port;Inicializa la puerta B para las entradas del
;teclado. Programa RB0-3 como salidas y RB4-7
;entradas con las resistencias de polarización
;habilitadas-------------------------------------------
BSF STATUS,RP0 ;Selecciona Pagina 1 (Banco)
MOVLW 0F0h ;PB4-7 como entradas
MOVWF TRISB ;y PB0-3 como salidas
BSF OPCION,RBPU ;Habilita R de polarización en entradas
BCF STATUS,RP0 ;Vuelve a la pagina 0 (Banco)
RETURN ;Retorna.
KB_Scan;Escanea el teclado
CLRF Tecla ;Borra Tecla y
INCF Tecla,f ;prepara Tecla para primer código.
MOVLW 0Eh ;Saca 0 a la primera fila
MOVWF PORTB ;de la Puerta B
NOP ;Nada para estabilización de señal.
Cheq_Col BTFSS PORTB,4 ;Primera columna = 0
GOTO antirebotes;Sale si se ha pulsado tecla.
INCF Tecla,f ;Si no tecla pulsada, incrementa tecla.
BTFSS PORTB,5 ;Segunda columna = 0
GOTO antirebotes;Sale si se ha pulsado tecla.
INCF Tecla,f ;Si no tecla pulsada, incrementa tecla.
BTFSS PORTB,6 ;Tercera columna = 0
GOTO antirebotes;Sale si se ha pulsado tecla.
INCF Tecla,f ;Si no tecla pulsada, incrementa tecla.
BTFSS PORTB,7 ;Cuarta columna = 0
GOTO antirebotes;Sale si se ha pulsado tecla.
INCF Tecla,f ;Si no tecla pulsada, incrementa Tecla.
Ultima_Tecla;comprueba si se a escaneado todo el teclado
MOVLW d'17' ;Carga W con el n£mero de Teclas + 1.
SUBWF Tecla,w ;y lo compara con el valor actual de Tecla.
BTFSC STATUS,Z ;Si Tecla + 1 = valor actual.
GOTO NTeclas;No ha sido pulsada ninguna tecla.
BSF STATUS,C ;Pone a 1 Bit C.
RLF PORTB,f ;as¡ la Fila 1 pasa a 1 con la rotaci¢n a izqda.
GOTO Cheq_Col
NTeclas CLRF Tecla ;Coloca variable Tecla a 0
RETURN ;y regresa.
antirebotes ;ahora se espera a que la tecla sea soltada para evitar rebotes
;y reactivaciones de tecla
;esta parte puede ser eliminada si para nuestro proyecto no es necesaria
;o es un inconveniente.
Espera1 BTFSS PORTB,4 ;Si no se suelta la tecla FILA 1
GOTO Espera1 ;vuelve a esperar.
Espera2 BTFSS PORTB,5 ;Si no se suelta la tecla FILA 2
11. GOTO Espera2 ;vuelve a esperar.
Espera3 BTFSS PORTB,6 ;Si no se suelta la tecla FILA 3
GOTO Espera3 ;vuelve a esperar.
Espera4 BTFSS PORTB,7 ;Si no se suelta la tecla FILA 4
GOTO Espera4 ;vuelve a esperar.
MOVF Tecla,w ;pone en w el numero contenido en la variable
CALL T_Conv;llama a la tabla de conversion y retorna
MOVWF Tecla ;con el valor en hexadecimal y lo pone en la variable.
RETURN ;vuelve al programa principal que hizo la llamada.
;----------------------------------------------------------------------------------------------------------
T_Conv ADDWF PCL,1
RETLW '0' ;Tecla nº0 = 0
RETLW '1' ;Tecla nº1 = 1
RETLW '4' ;Tecla nº2 = 4
RETLW '7' ;Tecla nº3 = 7
RETLW 'A' ;Tecla nº4 = A
RETLW '2' ;Tecla nº5 = 2
RETLW '5' ;Tecla nº6 = 5
RETLW '8' ;Tecla nº7 = 8
RETLW '0' ;Tecla nº8 = 0
RETLW '3' ;Tecla nº9 = 3
RETLW '6' ;Tecla nº10 = 6
RETLW '9' ;Tecla nº11 = 9
RETLW 'B' ;Tecla nº12 = B
RETLW 'F' ;Tecla nº13 = F
RETLW 'E' ;Tecla nº14 = E
RETLW 'D' ;Tecla nº15 = D
RETLW 'C' ;Tecla nº16 = C