Descargado 11 veces





















![Figura 3. Estructura del proceso de supervisión. Fuente [5]
Figura 4. Ventanas del Movicon. Fuente [5]](https://image.slidesharecdn.com/memoria-ix-selasi-2013-lv-150303085824-conversion-gate01/75/Memoria-ix-selasi-2013-lv-36-2048.jpg)





































































![IX Seminario Euro Latinoamericano de Sistemas de Ingeniería 2013
ISBN: 978-980-7630-00-9
Esta primera fase es de gran
importancia en el interior del sistema planteado, debido a que
simplificará la imagen obtenida conservando la fiabilidad de
los datos en las imágenes resultantes del mismo. El pre-
procesado empleado (Figura 5) en este documento fue
planteado por [33]. En este se toma como entrada el
radargrama resultado de la prospección (matriz en bruto, A) y
realiza la gestión del mismo en tres partes: a) binarización, b)
segmentación y limpiado y c) refinado.
Partiendo de las imágenes en bruto, con la aplicación de una
combinación adecuada de metodologías, se realizó la
eliminación de zonas no plausibles de localización de las
tuberías en las imágenes de los perfiles capturados con GPR.
Teniendo en cuenta que la imagen está compuesta por la
combinación de diferentes formas, se plantea que la no
variación de la amplitud de onda de manera horizontal,
corresponde a la no presencia de tuberías. Esto es así ya que
las figuras de las tuberías se ven representadas en los
radargramas en forma de hipérbolas. El algoritmo de
segmentación y limpiado, planteado en la Figura 5, se
implementó en Matlab y sus partes son:
1. Binarización. Esta primera parte del pre-proceso se plantea
en dos pasos: a) estandarización de trazas y b) selección de
tendencias. El primer paso, se enmarca en llevar cada una de
las trazas a una forma que sea común entre ellas y permita la
comparación y manejo. El segundo paso, aprovecha la idea
planteada en las transformaciones T14 y T15 por [34]. Sin
embargo, el nuevo algoritmo planteado en este caso obvia los
índices obtenidos y se manejan las transformaciones como
matrices binarias. Esta fase toma la matriz en bruto como
entrada y como salida se obtienen dos matrices, las cuales
denominaremos D y U, cuando la tendencia seleccionada sea
creciente o decreciente (parte inferior o superior),
respectivamente.
Segmentación y limpiado. La segmentación es el proceso de
dividir imágenes en regiones u objetos cuyos puntos (píxeles)
poseen atributos similares. Cada región segmentada suele
tener un significado dentro de la imagen, siendo el objetivo
simplificar y/o cambiar la representación de una imagen en
otra más significativa y más fácil de analizar.](https://image.slidesharecdn.com/memoria-ix-selasi-2013-lv-150303085824-conversion-gate01/75/Memoria-ix-selasi-2013-lv-146-2048.jpg)






































![IX Seminario Euro Latinoamericano de Sistemas de Ingeniería 2013
ISBN 978-980-7630-00-9
En la actualidad el problema de distribuir productos a partir de
un depósito original (punto de origen) y una cantidad de
clientes con una demanda por atender, juega un papel
importante en empresas comercializadoras ya que planificar
adecuadamente estos envíos puede significar considerables
ahorros logísticos y sobretodo en costos como: el consumo de
combustible, horas hombre, entre otros; que ayudarán a una
mejor rentabilidad para los negocios hoy en día. Son por estas
causas, que surge el problema de ruteo de vehículos (Vehicle
Routing Problem o las siglas en inglés VRP).
Este problema consiste en generar rutas de reparto dado una
cantidad de clientes por atender, un conjunto de vehículos de
reparto y un punto de origen, permitiendo minimizar ciertos
factores que ayuden a la empresa a obtener beneficios; estos
pueden ser: minimizar el tiempo de reparto, maximizar el
ahorro de combustible en los vehículos, minimizar la cantidad
de vehículos de reparto, lo cual llevaría a obtener menores
costos y por lo tanto obtener beneficios y una mejor calidad de
servicio e imagen [24]. Asimismo, presenta una serie de
variantes como es el caso de incluir: la capacidad de un
vehículo, espacios de tiempo de entrega, incluir varios puntos
de origen, entre otros.
Su objetivo principal será minimizar la cantidad de
vehículos y el tiempo de viaje (reduciendo así el gasto de
combustible, choferes, horas hombre), siempre y cuando se
respete que cada reparto no pueda exceder la capacidad que
tiene un vehículo [6]. Este tipo de problemas no tienen una](https://image.slidesharecdn.com/memoria-ix-selasi-2013-lv-150303085824-conversion-gate01/75/Memoria-ix-selasi-2013-lv-195-2048.jpg)
![IX Seminario Euro Latinoamericano de Sistemas de Ingeniería 2013
ISBN 978-980-7630-00-9
solución exacta porque encontrar la ruta mínima entre dos
puntos en un mapa que contiene miles de conexiones llevaría
a realizar cálculos computacionales muy elevados. Por ello
este tipo de problemas son clasificados como problemas de
clase NP-duros [24].
En las dos últimas décadas ha emergido un nuevo tipo de
técnicas aproximadas que consiste básicamente en la
combinación de métodos heurísticos (técnicas aproximadas
con componentes aleatorios guiados) básicos en entornos de
más alto nivel con el fin de explorar el espacio de búsqueda de
una forma eficiente y efectiva. Estos métodos son
comúnmente conocidos con el término metaheurísticas. En [4]
se pueden encontrar recopiladas varias definiciones de
metaheurísticas dadas por diferentes autores, pero en general
podemos decir que las metaheurísticas son estrategias de alto
nivel que planifican de manera estructurada la aplicación de
varias operaciones para explorar espacios de búsqueda de
elevada dimensión y complejidad intrínseca.
Los algoritmos metaheurísticos son una familia de
algoritmos cuya meta es precisamente dar soluciones
aproximadas a problemas generales de tipo NP-duros sin
necesidad de recorrer todo el espacio de búsqueda.
Los Algoritmos Evolutivos (AEs) son metaheurísticas que
comparten un concepto base común que es simular la
evolución de los individuos que forman la población usando
un conjunto de operadores predefinidos de selección y de
búsqueda. Existe una gran variedad de AEs, dentro de ellos se
incluyen los Algoritmos Genéticos (AGs) [18] que son los
utilizados en este problema. Otras tendencias en AEs hacen
uso de enfoques con multirecombinación [13] y enfoques con
múltiples padres conocidos como MCMP (Multiple Crossover
Multiple Parent) [14].
Las metaheurísticas híbridas consisten en combinar dos o
más algoritmos, diferentes metaheurísticas y métodos de otros
campos de las metaheurísticas para obtener sistemas que
aprovechen más las ventajas de las estrategias individuales
para conseguir un mayor beneficio que podrían brindar por
separado (sinergia). La combinación de estrategias que
permitan la reducción de la complejidad del problema, y el
mejoramiento de las soluciones son los enfoques más usados
por los autores para hacer sus métodos competitivos.
Para algunos problemas prácticos y también académicos, los
mejores resultados se han obtenido utilizando algoritmos
híbridos. En [34] y [35] se presenta una taxonomía de
metaheurísticas híbridas.
En este trabajo proponemos tres algoritmos híbridos que
utilizan como base un algortimo evolutivo multirecombinativo
con el objetivo de mejorar la performance obtenida por el
algoritmo base sin hibridar.
El trabajo está organizado de la siguiente manera: La
Sección 2 describe el problema y presenta algunos conceptos
báscios sobre metaheurísticas y metaheuristicas hibridas,
estableciendo las extensiones en los últimos años y los
métodos de resolución existentes. La Sección 3 se muestran
los algoritmos propuestos. Sección 4 se muestra el diseño de
experimentos y los resultados obtenidos. Finalmente, la
Sección 5 provee las conclusiones y futuras líneas de
investigación.
El VRP se puede definir como un problema de programación
entera perteneciente a la categoría de problemas NP-duros
Entre las diferentes variedades de VRP trabajaremos con el
VRP de Capacidad limitada (CVRP), en el que cada vehículo
tiene una capacidad uniforme de un único artículo. Definimos
el CVRP sobre un grafo no dirigido G = (V, E) donde V={v0,
v1,..., vn} es un conjunto de vértices y E = {(vi, vj) / vi, vj Є
V, i< j} es un conjunto de ejes.
Los vértices v0 parten del depósito, y es desde donde m
vehículos de capacidad Q deben abastecer a todas las ciudades
o clientes, representados por un conjunto de n vértices {v1, ...,
vn}.
Definimos E una matriz C = (cij) de costo, distancia o
tiempo de viaje no negativos entre los clientes vi y vj. Cada
cliente vi tiene una demanda no negativa de artículos qi y
tiempos de entrega δi (tiempo necesario para descargar todos
los artículos). Siendo v1,..., vm una partición de V, una ruta
Ri es una permutación de los clientes en Vi especificando el
orden en el que se visitan, comenzando y terminado en el
deposito v0. El costo de una ruta dada Ri = { v0, v1, ..., vk+1
}, donde vj Є V y v0 = vk+1= 0 (0 indica el depósito), viene
dada por:
Cost(Ri)= Ci,j+1 + δj (1)
y el costo de la solución al problema (S) es:
FCVRP(S) = Cost(Ri) (2)
El CVRP consiste en determinar un conjunto de m rutas (i)
de costo total mínimo - como especifica la ecuación (2); (ii)
empezando y terminando en el deposito v0; de forma que (iii)
cada cliente es visitado una sola vez por un sólo vehículo,
sujeto a las restricciones (iv) de que la demanda total de
cualquier ruta no exceda:
; y (v) la duración total de
cualquier ruta no supera el límite preseleccionado
D (Cost(Ri) ≤ D). Todos los vehículos tienen la misma
capacidad y transportan el mismo tipo de artículo. El número
de vehículos puede ser un valor de entrada o una variable de
decisión. En este estudio, la longitud de las rutas se minimiza
independientemente del número de vehículos utilizados.](https://image.slidesharecdn.com/memoria-ix-selasi-2013-lv-150303085824-conversion-gate01/75/Memoria-ix-selasi-2013-lv-196-2048.jpg)













![IX Seminario Euro Latinoamericano de Sistemas de Ingeniería 2013
ISBN 978-980-7630-00-9
203
DESARROLLO DE UN SISTEMA DE INFORMACIÓN DE HISTORIAS CLÍNICAS
ELECTRÓNICAS
INFORMATION SYSTEM ELECTRONIC MEDICAL RECORDS
Jorge Domínguez Chávez
Departamento de Informática y Departamento de Postgrado, Universidad Politécnica Territorial del estado Aragua
“Federico Brito Figueroa”, La Victoria, Venezuela
e-mail: jodocha@upta.edu.ve
RESUMEN. Se desarrolló un prototipo de un “Sistema de información de historias clínicas electrónicas”, sustentado en la metodología
ISI, Ingeniería de Sistemas de Información. El sistema presentado está conformado por una jerarquía de tres componentes
principales: componente de tabla maestra de pacientes, componente integración semántico-tablas maestras y componente de historia
clínica electrónica. Éste último, se dividió en siete subcomponentes: a) Instalación, actualización y configuración, b) Seguridad, c)
Datos, d) Programación, e) Interacción humano-computador, f) Terminología médica y g) Estadísticas. Luego se diseñó y modeló un
Sistema de Historias Clínicas Electrónicas con el lenguaje UML; así como formatos para los requerimientos del sistema. Se diseñó la
base de datos. Se empleó software de código abierto (open source) para cada una de las etapas del proyecto. Por último, se presenta el
prototipo obtenido, como sistema escalable centrado en la historia del paciente más que el hospital o médico tratante y que será
visualizado en múltiples dispositivos móviles, facilitando el seguimiento del tratamiento del paciente por distintos médicos de distintos
hospitales y su evolución, a través de dispositivos móviles como laptops, tabletas, ipad, teléfonos inteligentes entre otros
Palabras claves: Sistema de información, Historia Clínica Electrónica, Metodología ISI, Software de código abierto.
ABSTRACT. We developed a prototype of an "Information System electronic medical records" , supported by the methodology ISI ,
Information Systems Engineering . This system consists of a hierarchy of three main components : a component of patient master table
, semantic integration component master tables and electronic medical record component. The latter divided into seven sub-
components: a) Installation, upgrade and configuration , b ) Security, c ) Data d ) Programming , e) human-computer interaction , f )
Medical Terminology g ) Statistics . Then he designed and fashioned an Electronic Medical Records System with UML as well as
formats for system requirements. Designed the database. We used open source software (open source) for each of the stages of the
project. Finally , we present the prototype obtained as scalable focused on the patient's record rather than the hospital or physician
records and will be displayed on multiple mobile devices , yielding the monitoring of patient treatment by several doctors from
different hospitals and their evolution through mobile devices such as laptops , tablets, iPad , Smartphones and more
Keywords: Information system, Clinical Electronic Record, ISI Methodology, Free Software.
INTRODUCCIÓN
Este trabajo pretende desarrollar algunas ideas expuestas en
un trabajo previo titulado “Propuesta de un repositorio de
Historias Clínicas Electrónicas”[1] y su proyección sobre
“Desarrollo de un sistema de información de historias clínicas
electrónicas”. En primer lugar, se propone a Ingeniería de
Sistemas de Información, metodología ISI como metodología
de desarrollo. En segundo lugar, el sistema estará conformado
por tres componentes principales: componente de tabla
maestra de pacientes, componente integración semántico-
tablas maestras y componente de historia clínica electrónica.
Éste, se divide en siete subcomponentes: a) Instalación,
actualización y configuración, b) Seguridad, c) Datos, d)
Programación, e) Interacción humano-computador, f)
Terminología médica y g) Estadísticas. Componentes a
implementar para llevar a cabo esta propuesta completa. Por
último, se presenta el prototipo obtenido, como sistema
escalable centrado en la historia más que el hospital o médico
tratante y que será visualizado en múltiples dispositivos
móviles, facilitando el seguimiento del tratamiento del
paciente por distintos médicos de distintos hospitales y su
evolución. Como objetivo paralelo se pretende el paso de una
historia clínica soportada por papel, a un almacenamiento en
base de datos lo que supone disponibilidad y accesibilidad,
tanto de forma como en contenido; así como la homogeneidad
en formatos legibles y la parametrización de datos. El
componente integración semántico-tablas maestras supone la
parte más ambiciosa del proyecto ya que asume ser la base de
sistema inteligente que sustentará una parte académica, de
investigación, de ayuda al diagnóstico de pacientes; así como
posible representación de datos y resultados en forma de
blogs profesionales y académicos. El diseño y desarrollo del
sistema propuesto está sustentado por software de código
abierto, lo que evita costosas licencias, los problemas de
propiedad intelectual e industrial del software; además
facilitará su modificación y/o reparación en caso de ser
necesario.](https://image.slidesharecdn.com/memoria-ix-selasi-2013-lv-150303085824-conversion-gate01/75/Memoria-ix-selasi-2013-lv-220-2048.jpg)
![IX Seminario Euro Latinoamericano de Sistemas de Ingeniería 2013
ISBN 978-980-7630-00-9
204
A. La Propuesta
Al proponer la metodología Ingeniería de Sistemas de
información (ISI) como un conjunto de conceptos básicos de
Gerencia, Sistema, Información, Sistema de Información,
Planificación de Proyectos, se tiene como objetivo la
necesidad y deseo de obtener la información requerida de
forma fácil y rentable, sin importar el tamaño o tipo de la
empresa o de la experiencia informática. La intención de ISI
es conectar a las personas entre sí y proveerles de una forma
de analizar, desarrollar y diseñar sistemas de información y
aumentar la productividad en general. Además, se basa en el
concepto de que la mejor ingeniería es la sencilla.
ISI consta de siete (7) etapas básicas: explorativa,
levantamiento de información, diseño o mejora del sistema,
codificación del programa, evaluación de los resultados del
prototipo y evaluación de resultados del sistema.
El autor propone utilizar tres (3) complementos a ISI: la
arquitectura cliente-servidor, el lenguaje procedimental SQL y
el Desarrollo de software bajo metodologías ágiles (Métodos
Ágiles XP).
ISI, como metodología, consiste de varias capas que
incrementan su complejidad y capacidad. Los usuarios finales
con poca o ninguna experiencia en el procesamiento
electrónico de datos (PED) aprenden las características
básicas muy rápidamente, los profesionales disponen de un
conjunto completo y potente de facilidades y se convierte en
el vehículo común entre analistas de sistemas, programadores
y usuarios finales, que se usa tanto para la comunicación
como para satisfacer requerimientos e implementar
soluciones. De igual manera se presentan recomendaciones a
seguir y errores a evitar, durante el Desarrollo de Sistemas de
Información [2].
Los estudios, la experiencia y la práctica indican que no existe
una solución única que conduzca a un modelo o patrón
general del comportamiento de una organización, sino que
cada una depende de su propia estructura organizativa y de su
propio proceso de administración, por lo que cada solución es
particular y “cortada a la medida”, con factores esenciales en
su desenvolvimiento como sistema “orgánico”.
Tradicionalmente los sistemas de información dedicados a
historias clínicas electrónicas han estado centrados en el
centro hospitalario y/o en el médico tratante. En este trabajo,
la gestión se centra en el paciente, por lo que Hospitales y
médicos son entidades.[3]
La importancia del empleo, intensivo y extensivo, de la
historia clínica electrónica se ve refleja día a día con su
implementación en diferentes partes del mundo, incluso
muchos países la han hecho ley debido a los requerimientos
de un conocimiento más exacto sobre la historia clínica.
Originalmente la información de la historia clínica se lleva en
papel, dicho formato de almacenamiento trae aparejado
algunos problemas de disponibilidad y accesibilidad, formato
y contenido; así como la no uniformidad en formatos ni la
parametrización de datos. Actualmente, la mayoría de los
registros médicos están orientados a las fuentes que generan
la información (notas de evolución, exámenes
complementarios, indicaciones médicas, lista de problemas y
otros) y un ordenamiento cronológico para cada una de ellas.
Con la informática, el desarrollo de software, la Internet así
como el requerimiento de información precisa, exacta, útil y
disponible en cualquier el momento y lugar, surge el concepto
de Repositorio de Historia Clínica Electrónica (HCE). Se
presenta una nueva forma de almacenamiento, recuperación,
procesamiento de los datos, visualización e intercambio de
formatos y datos. Inclusive favorece la comunicación
profesional, académica y de investigación a través de correos,
foros y blogs.
La Historia Clínica Electrónica es una aplicación informática
que revolucionará el diagnóstico médico, mejorar la calidad y
rapidez de los servicios médicos, asegurando su permanencia
y presencia en la medicina actual. Los médicos con cualquiera
de los sistemas de historia clínica electrónica se beneficiaran
de tener notas clínicas legibles, más datos sobre pacientes y
sus patologías, referencias y solicitudes automatizadas tanto
en laboratorio, consulta, dieta y tratamiento, así como
seguridad en el acceso de ellas.[4]
Sin embargo no todo son ventajas, también hay desventajas.
Los médicos llevan sus historias en el hospital donde trabajan
y/o en su consulta privada por lo que no acceden a los datos
de sus pacientes fuera de su horario de trabajo y no acceden a
los datos clínicos de otros pacientes. También los datos de los
pacientes no son compatibles entre sistemas informáticos y/o
base de datos. Tampoco existe un seguimiento en el desarrollo
de enfermedades por etapas y/o paso entre enfermedades
distintas durante la vida del paciente.
Existen sistemas de historias clínicas electrónicas que están
sesgados a ciertas áreas profesional y/o especialidades, que
llamaremos sistemas no escalables [5], así se tiene sistema
informáticos de gineco-obstetricia, sistema médico-
odontológico, sistema médico de salud ocupacional, entre
otros. Estos son sistemas aislados, no interrelacionados, que
son motivados por intereses particulares, por lo que se
constituyen en una visión fragmentada del problema de salud
del paciente, sin considerar aquellos procesos que siguen
siendo manuales. Tiene como consecuencia múltiples
inconvenientes para obtener información certera, actualizada
y a tiempo para la toma de decisiones, o para la
implementación de planes y políticas dirigidas a prevenir o a
impactar positivamente en la salud de los habitantes de la
región.
Atendiendo a estos problemas se pretende desarrollar un
sistema de información de historias clínicas electrónicas para
mejorar la atención a los pacientes tal que sea un elemento
clave de una estrategia para el Sistema Nacional de Salud
contemplado en la Constitución de la República Bolivariana
de Venezuela en sus artículos 28 y 60 ; así como en la Ley
Especial Contra los Delitos Informáticos.[16] [17]
Un sistema de esta naturaleza, tiene cinco componentes
fundamentales: los requerimientos, la base de datos, la](https://image.slidesharecdn.com/memoria-ix-selasi-2013-lv-150303085824-conversion-gate01/75/Memoria-ix-selasi-2013-lv-221-2048.jpg)
![IX Seminario Euro Latinoamericano de Sistemas de Ingeniería 2013
ISBN 978-980-7630-00-9
205
codificación, las pruebas y depuración y, por último, la
producción.
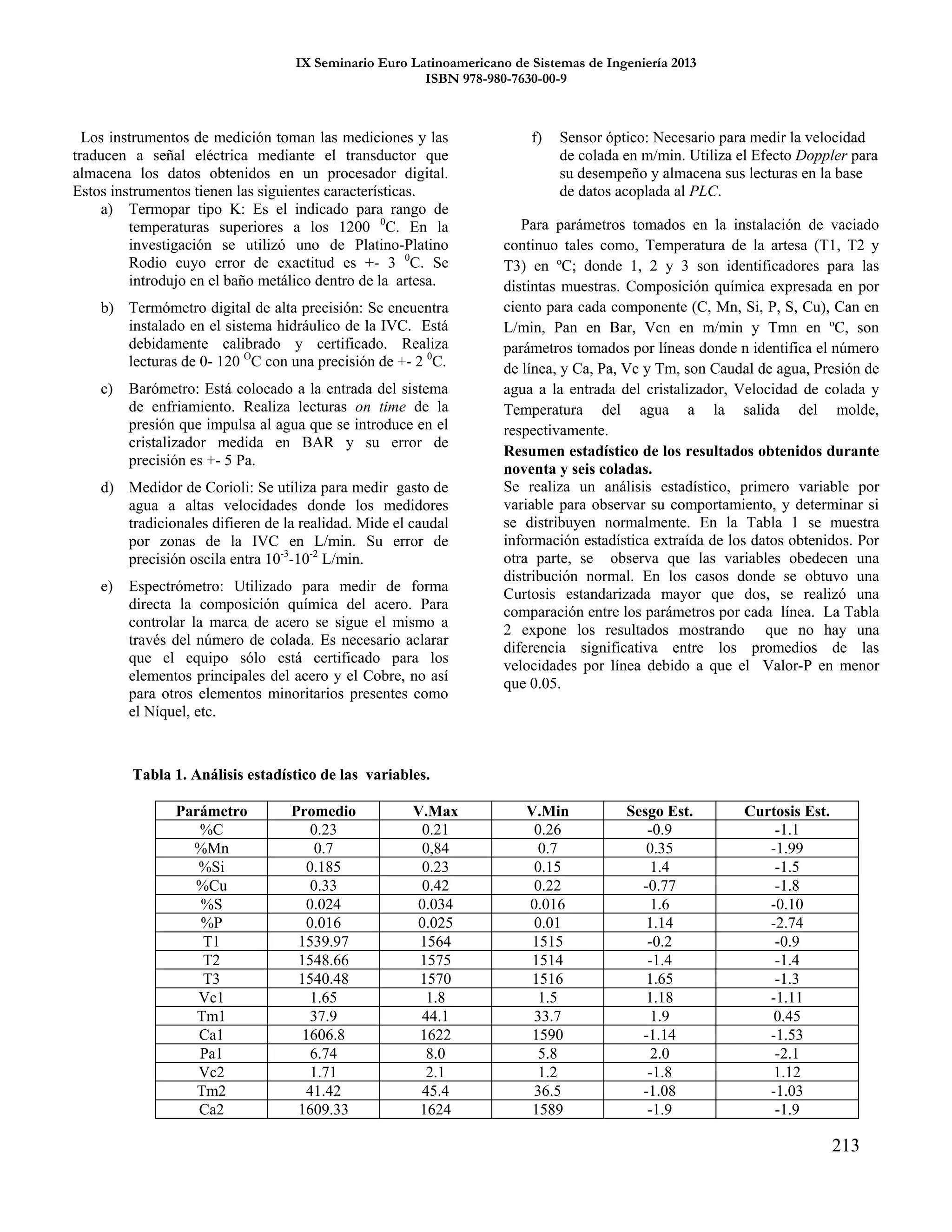
Los requerimientos y la base de datos son esenciales para el
sistema. En la tabla # 1 se comparan diferentes autores y sus
puntos de vista relativos al diseño de sistemas de información.
Tabla # 1
J. Senn [6] M Zelkowitz [7] K Whitten[8] J Domínguez
Requerimiento 35 % 20 % 40 % 60 %
Análisis 15 %
Diseño 20 % 20 %
Codificación 25 % 20 %
Depuración 35 % 35 %
Pruebas 35 % 15 %
Documentación 5 % 5 % 5 % 5 %
Donde:
Requerimientos + Análisis + Diseño + Codificación + Depuración + Pruebas
+ Documentación = 100
Requerimientos + Análisis + Diseño = Diseño de base de datos
1 Tareas a desarrollar
Elaborar una documentación que integre los siguientes
contenidos:
1.1 Organigrama jerárquico del modelo propuesto
I.II Delimitación del Proyecto
Descripción de los componentes
1.1 Instalación, actualización y configuración
Componente para instalar el sistema de historias clínicas
electrónicas cuando es descargado e instalado en un servidor,
independientemente del sistema operativo residente,
configurar el sistema de HCE con el propósito de adaptar y
personalizar la interfaz a los requerimientos y preferencias del
centro de salud y/o particulares y, por último, actualizar la
versión del sistema HCE cuando ya está instalado en el
servidor y copia autorizada.
1.2 Seguridad
Componente de seguridad para proteger las claves primarias
de las tablas, claves de enlace persona-paciente-historia,
protección contra inyecciones SQL y para autentificar acceso
autorizado. Protección contra: Revelación no autorizada
(confidencialidad) , Alteración no autorizada (integridad) y
Destrucción intencional o involuntaria ; además, Protección
dirigida a dos tipos de usuarios: Los que no tienen derechos
de acceso y Los que tienen derechos limitados a ciertas
acciones.
El componente debe considerar brechas en la seguridad que
puedan afectar otras partes del sistema, que a su vez puedan
afectar la Base de Datos.
Aspectos Relativos a Seguridad : Legales , Sociales y Éticos ,
Controles Físicos , Cuestiones Estratégicas , • Problemas
Operativos , Controles de Hardware , Sistema de Seguridad
del Sistema Operativo y Sistema de Seguridad de la Base de
Datos.
Como mecanismos de Seguridad de la Base de Datos se tiene
a: Control de accesos , Control de flujo , Control de inferencia
y Encriptado.
1.3 Datos
Componente de datos en el contexto del aumento masivo de
los servicios de tecnología de la información, que imponen
una creciente demanda al Repositorio de HCE presentará una
estrategia para rediseñar la infraestructura subyacente, de la
base de datos permitiendo a los centros de salud y médicos
como usuarios finales beneficiarse de un mundo móvil cada
vez más orientado a servicios. A medida que más dispositivos
móviles se conecten a Internet, el software y las aplicaciones
basados en el Repositorio de HCE se volverán más
inteligentes, aprendiendo de los miles de millones de
profesionales y equipos que los utilizarán, se iniciará una
nueva era de experiencias y servicios ricos en contexto. Esto
también da lugar a una enorme cantidad de conexiones de red
y a un flujo continuo de datos transmitidos en tiempo real y
no estructurados. Al transportarse un mayor volumen de
datos, que se colectan, se agregan y se analizan al
Repositorio, estarán emergiendo nuevos retos para las redes,
el cómputo y el almacenamiento. Como resultado, el sistema
HCE tendrá que ser más ágil y orientado a los servicios como
nunca antes. Y más fácil de manejar y operar. La base de
datos está diseñada en POSTGRESQL. Las Metas son:
Manejo de datos, Requerimientos de uso de datos, Proceso de
colección de datos e Implementación de servicios.[9]
1.4 Programación
Esta etapa presenta los modelos, conceptos y mecanismos
fundamentales sobre los que se apoya rá el desarrollo de la
aplicación HCE basado en componentes reutilizables. En
primer lugar, las arquitecturas software y los marcos de
trabajo proponen ofrecer soluciones de diseño desde el punto
de vista estructural de las aplicaciones, y de las relaciones
entre sus componentes. A otro nivel se encuentra la
programación orientada a componentes, un paradigma que
construirá componentes reutilizables en entornos abiertos y
distribuidos, con el objetivo de lograr un mercado global de
software para demandas futuras de la HCE. Basados en ellos,
los modelos y plataformas de componentes proporcionarán los
mecanismos adecuados para tratar la complejidad de los
Figura 1: Organigrama del proyecto.](https://image.slidesharecdn.com/memoria-ix-selasi-2013-lv-150303085824-conversion-gate01/75/Memoria-ix-selasi-2013-lv-222-2048.jpg)
![IX Seminario Euro Latinoamericano de Sistemas de Ingeniería 2013
ISBN 978-980-7630-00-9
206
problemas que aparezcan en los sistemas abiertos y
distribuidos. Finalmente, se describen las dificultades que
encuentran las metodologías tradicionales para construir
aplicaciones en estos nuevos ambientes, y los retos a los que
se enfrenta la Ingeniería del Software para hablar realmente
de “Ingeniería del Software Basada en Componentes”. Este
componente será programado en PHP5.
1.5 Interacción humano-computador (IHC)
Componente IHC para hacer más sencilla e intuitiva la
interacción entre el usuario y sus dispositivos. Buscando un
nuevo “paradigma de la interacción”, con el potencial de
“eliminar última barrera técnica entre el usuario y el
hardware”. Asimismo, IHC facilitará considerablemente la
cooperación entre distintos usuarios, mediante el intercambio
de aplicaciones e interacción entre ellos, también incorporará
la posibilidad de tener a dos usuarios trabajando
simultáneamente frente al sistema.
1.6 Terminología médica
Terminología Médica. De numerosas revisiones, se pudo
corroborar la existencia de obras de consulta; sin embargo
existen dificultades en los centros educacionales del sector,
relacionados fundamentalmente con la no existencia de una
material docente, que permita apropiarse adecuadamente de
estos conocimientos. De ahí que se planteara como problema
científico, el cómo favorecer desde la Informática y las
Comunicaciones; la enseñanza, sistematización y
perfeccionamiento de la Terminología Médica. Para
resolverlo, se propone desarrollar una multimedia educativa
con el objetivo de ejercitar, sistematizar y profundizar los
conocimientos relacionados con esta disciplina, dirigida a
estudiantes y profesionales de la salud. Dentro de los métodos
teóricos se utilizarán: el análisis y síntesis, el histórico –
lógico y el modelo, y entre los empíricos están: la observación
científica y la revisión de documentos. Para el desarrollo de
esta multimedia se utilizarán herramientas tales como: GIMP
para el diseño y tratamiento de las imágenes, Blender para la
animación de textos, así como PhotoFilm Strip para el
ensamblaje de la multimedia. Es válido destacar que esta
multimedia tiene gran pertinencia, al ser una herramienta que
por su flexibilidad, adaptabilidad, portabilidad y robustez,
posibilita a los usuarios sistematizar, profundizar y ejercitar
los conocimientos relacionados con la Terminología Médica.
[10]
1.7 Estadísticas
Componente para cuantificar la información que unos
resultados en unos pacientes del pasado aportan sobre
pacientes futuros. La estadística cuantifica la información que
proporciona un conjunto de pacientes y lo hace valorando la
cantidad de incertidumbre que todo el proceso. También dice
cómo se deben recolectar los datos para que aporten el
máximo de información.
El papel de la estadística en la investigación médica, es
funcionar como herramienta desde el planeamiento, el análisis
de los datos y la obtención de conclusiones, no puede ser
desconocida por los investigadores a pesar de que no tenga
oportunidad de usarla en toda su amplitud.
La necesidad de un enfoque estadístico es bien reconocido en
la investigación y en la práctica de las disciplinas que
constituyen la salud pública, ya que estas estudian
comunidades o poblaciones en las que claramente se aplican
las leyes de los grandes números y de las fluctuaciones
aleatorias. La extensión de los conocimientos y aptitudes de
carácter estadístico que necesitan adquirir los profesionales de
la salud pública son importantes, porque el conocimiento de
los principios y métodos estadísticos y la competencia en su
aplicación se necesitan para el ejercicio eficaz de la salud
pública, y adicionalmente para la comprensión e
interpretación de los datos sanitarios; a fin de discriminar
entre opiniones arbitrarias o discrecionales, con respecto a las
verdaderamente evaluadas en un contexto científico.
El conocimiento de los métodos estadísticos está
estrechamente ligado a una buena práctica de la investigación
en salud. Ya que es necesario para interpretar correctamente y
de una manera crítica los resultados obtenidos. Se considera
como premisa que un buen trabajo de investigación en salud
debe dedicar un espacio a describir los métodos de análisis de
datos utilizados; y entre los factores determinantes para un
buen análisis se encuentra el tipo de diseño y el conocimiento
de las variables de estudio.
Se propone como solución al problema planteado el diseño e
implementación de un componente que oriente teórica y
prácticamente a los investigadores de las Ciencias Médicas en
los contenidos de Estadística, componente que ayude a los
médicos y bioestadísticos a lograr objetivos pedagógicos, para
que incorporen determinados conceptos, manejen con soltura
ciertos procedimientos y adquieran o afiancen actitudes en el
tratamiento estadístico de datos, diseño de experimentos y
procesamiento de los resultados en sus investigaciones.[11]
I.III Relaciones entre los actores principales
Diseño y modelo de un Sistema de Historias Clínicas
Electrónicas empleando el lenguaje UML.
Este trabajo está basado en el Lenguaje de Modelado que
simula y visualiza un sistema no codificado. Incluye:
Definición de los requerimientos del sistema.
Los diagramas de casos y subcasos de uso.
La descripción de los casos de uso.
Diagrama de Estructura Estática (de Clases).
Diagrama de Interacción.
Este trabajo solamente considera la codificación del módulo
de paciente, con el propósito de mostrar como se lleva a un
lenguaje particular el diseño realizado en UML.
Requerimientos del sistema.
Número Descripción
Consultas / Informes
R01 Informe de Historia de pacientes
R02 Informe de Historia por fecha](https://image.slidesharecdn.com/memoria-ix-selasi-2013-lv-150303085824-conversion-gate01/75/Memoria-ix-selasi-2013-lv-223-2048.jpg)

![IX Seminario Euro Latinoamericano de Sistemas de Ingeniería 2013
ISBN 978-980-7630-00-9
208
Flujo Básico y Flujo alterno de los Casos de Uso
Flujo Básico
Nombre del
Caso de Uso:
Manejo de pacientes
Alias:
Actores: Usuario del sistema
Usuario del
Sistema
Respuesta del sistema
1. Escribe cédula
2. Buscar paciente por cédula
3. Escribe los datos
4. Valida datos:
1. ingrese letra correspondiente a
Venezolano o Extranjero,
2. ingrese cedula, sólo números
3. ingrese nombres y apellidos, sólo letras y
un espacio en blanco
4. ingrese dirección, ciudad, estado,
alfanumérico
5. ingrese sexo, correspondiente a
masculino o femenino.
6. ingrese estado_civil, seleccionar uno de
varios valores.
7. ingrese teléfono celular, teléfono
habitación, sólo números
8. ingrese fecha_nacimiento, sólo números
9. ingrese lugar_nacimiento, alfanumérico.
10. ingrese nivel educación, seleccionar uno
de varios valores.
11. ingrese trabaja, correspondiente a si o no.
12. ingrese ocupación, seleccionar uno de
varios valores.
13. La fecha de registro es la fecha del
sistema.
5. Presionar botón
grabar
6. Graba datos en sistema.
Flujo alternos
Nombre del Caso de
Uso:
Manejo de Pacientes – IngresarPaciente
Alias:
Actores: Usuario del sistema
Usuario del
Sistema
Respuesta del sistema
Linea 1 Si el paciente existe lo informa y muestra datos.
Linea 3 Si algún dato obligatorio está vacío muestra mensaje
correspondiente.
Diagrama de Clases
Diseño de la base de datos
Para este proyecto, el diseño e implementación de la base de
datos es vital. Se ha seleccionado PostgreSQL por ser líder
entre los gestores de bases de datos de código abierto, y
cuenta con una comunidad global de miles de contribuyentes
y usuarios, y docenas de compañías y organizaciones. Como
Proyecto, PostgreSQL tiene más de 20 años de ingeniería, con
un ritmo de desarrollo actual sin precedentes. Su conjunto de
funcionalidades no sólo es comparable a los mejores sistemas
gestores de datos privativos, sino que las superan en
características avanzadas, extensibilidad, seguridad y
estabilidad. Operando con PostgreSQL se realiza una
programación centralizada, a base de programas,
disparadores, procedimientos o funciones, las cuales están
almacenado en la base de datos y listas para ser usadas. Un
procedimiento almacenado en PostgreSQL se puede escribir
en múltiples lenguajes de programación. En una instalación
por defecto de PostgreSQL podremos tener disponibles los
siguientes lenguajes: PL/pgSQL, PL/Perl, PL/Tcl y
PL/Python.,[12][13][14]
Además, aumentará el rendimiento de la aplicación al no tener
que mandar datos entre el cliente y el servidor, y con el
consiguiente ahorro de líneas de código redundante y
complejidad. Evitando que el código forme parte de los
formularios que viajarán por la Internet.
La escalabilidad vertical de PostgreSQL mejora la utilización
eficiente del hardware en servidores más potentes. Los
avances en gestión de bloqueos, eficiencia en escritura, acceso
de sólo índices y en otras operaciones de bajo nivel permiten
que PostgreSQL pueda manejar cargas de trabajo de mayor
volumen. En números, esto significa:
Hasta 350.000 consultas de lectura por segundo (más
de 4 veces más rápido)
Consultas en almacenes de datos con acceso sólo de
índices (2-20 veces más rápido)
Hasta 14.000 escrituras de datos por segundo (5
veces más rápido)
Hasta un 30% de reducción de consumo de energía
por la CPU
Figura 4: Diagrama de clases del proyecto.](https://image.slidesharecdn.com/memoria-ix-selasi-2013-lv-150303085824-conversion-gate01/75/Memoria-ix-selasi-2013-lv-225-2048.jpg)
![IX Seminario Euro Latinoamericano de Sistemas de Ingeniería 2013
ISBN 978-980-7630-00-9
209
Además, la adición de replicación en cascada permite a los
usuarios procesar grandes lotes mediante servidores escalados
horizontalmente bajo PostgreSQL 9.2.
B. Resultados
Los sistemas de información de historia clínica electrónica
son una realidad en muchos centros hospitalarios del país. Sin
embargo, la implantación de un sistema de las características
de este proyecto presenta retos importantes a nivel de
procesos y de costos para las organizaciones públicas y
privadas [15]. Todo sistema de información hospitalaria
requiere de:
Una red de comunicaciones: tipos de redes (Intranet
e Internet).
Equipo de cómputo (hardware): dependiendo de la
infraestructura y la posibilidad económica de las
instituciones.
Software de base: selección de plataforma con la cual
se programará el sistema, que debe ser amigable al
usuario.
De la mano del avance tecnológico y la aparición de las
computadoras personales, el foco del desarrollo se centró en
áreas clínicas y de exámenes complementarios (también
llamadas auxiliares o departamentales) pero sin integración
entre ellas, actuando cada una como silos de información.
Debido a la necesidad de integrar la información generada por
los sistemas departamentales surgió la necesidad de
comunicar estos sistemas entre sí mediante el uso de un
repositorio de datos de sistemas de información clínicos. Si
bien, una de las premisas de estos nuevos sistemas fue
respetar los procesos asistenciales y tener al acto médico
como eje central de su modelo de información.
Desde entonces y hasta hoy, la descentralización de la
atención médica en redes asistenciales generó nuevamente la
necesidad de conectar múltiples sistemas, más allá de los
muros de una institución, que posibiliten la fluida
comunicación de la información clínica, basados en
componentes basados en TIC para computadoras, laptops,
tabletas, teléfonos inteligentes, entre otros dispositivos
móviles. Generando nuevos requerimientos para este
proyecto. Ver figura 6.
Figura 5: Parte del diseño de la base de datos del proyecto
El uso del software libre, así como la experiencia de las
universidades y centros de desarrollo, unido a la voluntad
política de hacer bien las cosas, hacen que este proyecto sea
factible en un plazo de un año.
Un sistema de información de HCE puede ser implementado
de una gran variedad de formas, teniendo en cuenta su
estructura, propósito, datos y uso[14]. Tanto las
funcionalidades como los componentes a integrar varían si se
trata de:
Una HCE implementada para un consultorio
particular profesional de un médico en el ámbito
ambulatorio.
Una HCE implementada para un hospital que cubre
todo, o casi todo, de los niveles de atención
(ambulatorio, emergencias, hospitalización general,
domiciliaria y tercer nivel).
Una HCE implementada para integrar la información
para múltiples hospitales, clínicas, ambulatorios, CDI
de diferentes niveles, donde la necesidad de
estándares y protocolos de comunicación aumentan
la complejidad del proyecto.
Los sistemas de información clínicos modernos están
compuestos por múltiples componentes y el verdadero desafío
reside en lograr una adecuada articulación de cada uno de
ellos.
Figura 6: Entorno de un sistema de información de historia clínica
electrónica.](https://image.slidesharecdn.com/memoria-ix-selasi-2013-lv-150303085824-conversion-gate01/75/Memoria-ix-selasi-2013-lv-226-2048.jpg)
![IX Seminario Euro Latinoamericano de Sistemas de Ingeniería 2013
ISBN 978-980-7630-00-9
210
C. Conclusión
La factibilidad de un proyecto esta magnitud ha quedado
confirmada con algunos de los procesos realizados y los datos
recabados. De los resultados obtenidos es posible extraer la
siguiente generalización: los médicos con el historia clínica
electrónica se beneficiarían de tener notas clínicas legibles,
más datos de seguridad del paciente, y las referencias y
solicitudes automatizadas de exámenes de laboratorio, dietas y
de tratamientos.
En una próxima entrega aportaremos más datos que
contribuyan a conocer mejor la madurez del uso de HCE
compartida por múltiples instituciones y médicos; así como el
empleo múltiple de los formatos electrónicos que constituyen
la HCE, independientemente de las plataformas de software
que utilicen, hace necesario que las instituciones de prestación
de servicios de salud, implementen estándares informáticos
internacionalmente reconocidos, con el fin de garantizar la
integridad y legibilidad de la información. Para enriquecer la
complejidad de las operaciones. Gracias a la continuidad de
este tipo de investigación podremos mejorar la competencia
comunicativa de nuestros médicos y pacientes; manejando un
conjunto de formatos y datos que vayan encaminados a la
incorporación de destrezas de este tipo, lograremos controlar
y hacer avanzar el proceso de salud.
Las herramientas para la gestión de la historia clínica en
hospitales y centros de salud se han ido incorporando
progresivamente en los últimos años a lo largo y ancho del
mundo. Aún se presentan ciertos retos pero el futuro y la era
digital en la medicina se abre paso día a día.
D. Referencias
[1] Domínguez Chávez, J. (2012) Diseño de un repositorio de
historias clínicas electrónicas en Venezuela. IX Jornadas
Técnicas. Fundación Instituto de Ingeniería. Septiembre 2012,
Venezuela.
[2] Domínguez Chávez, J. (2012) Ingeniería de Sistemas de
Información, metodologías ISI. 2da. Edición. IEASS Editores,
Venezuela.
[3]Ortiz Quesada, Federico, Modelos Médicos, MacGraw-Hill
Interamericana, México, 2001.
[4] Negrete José y Gerardo López, Informática Médica. Edit.
Noriega Limusa, México, 1995.
[5] Churchman, C. West, El enfoque de sistema, Editorial
Diana, México, 1985.
[6] Senn, J. (1990) Análisis y diseño de sistemas de
información (2da Edición) McGraw-Hill, México
[7] Zelkowitz M. V. (1980) Advances in software
engineering: Resource estimation, in Advances in Computer
Program Management, Heyden and Son, USA.
[8] Gleser, M., "The medical Event Vector", Methods of
information in Medicine, 18(3), pp. 127-131, 1990.
[8] Whitten, K. (2000) Análisis y diseño de sistemas de
información, McGraw-hill, México
[9] Castano, S., Fugini, M., Martella, G. y Samarati, P.
(1994). Database Security. Addison-Wesley.
[10] Fernández-Medina, E. y Piattini, M. (2002). Una
Metodología para Diseñar Bases de Datos Seguras
Implementadas en Oracle9i. Label Security. Cuore, Vivat
Academia. Nº 3. Noviembre.
[11] Chambers (2010) Software for Data Analysis:
Programming with R ,
[12] Fernández-Medina, E., Moya, R. y Piattini, M. (2003).
Seguridad en TI. La Construcción para una Sociedad
Conectada. AENOR. Madrid.
[13] Fernández-Medina, E., Piattini, M. y Serrano, M. A.
(2001). Seguridad en Bases de Datos. Fundación Dintel,
Madrid.
[14] Huesing, S.A., Administrative and Financial Systems,
MEDINFO-83, North-Holland, 1983, pp. 208-211.
[15] Hayrinen, Saranto y Nykanen, (2008). “Definition,
Structure, Content, Use and Impact of Electronic Health
Records: A review of research literature, Int J Med Inform,
Vol 77, No. 5
[16] Constitución de la República Bolivariana de Venezuela.
www.ucv.ve/.../constitucion-de-la-republica-bolivariana-de-
venezuela.html
[17] Ley Especial Contra los Delitos Informáticos.
fundabit.me.gob.ve descargas pdf ECDI. pdf
Jorge Domínguez Chávez Físico, Maestro en ciencias físicas, Doctor en
ciencias, mención Desarrollo de software por la Universidad Nacional
Autónoma de México. Es profesor de la Universidad Politécnica Territorial
del estado Aragua, Venezuela, Tutor designado por la Universidad Nacional
Autónoma de México y ha sido profesor visitante en la Universidad Federal
de Rio Grande do Sul, en Brazil. Autor de varios libros en el área de la
programación, computación y sistemas.
Miembro de la Sociedad Mexicana de Física, de la Sociedad Matemática
de México, de la Sociedad Mexicana de la Inteligencia Artificial.
El prof. Domínguez es mexicano, residente en Venezuela.](https://image.slidesharecdn.com/memoria-ix-selasi-2013-lv-150303085824-conversion-gate01/75/Memoria-ix-selasi-2013-lv-227-2048.jpg)
![IX Seminario Euro Latinoamericano de Sistemas de Ingeniería 2013
ISBN 978-980-7630-00-9
211
MODELO DE ESTIMACIÓN DEL CAUDAL DE AGUA EN INSTALACIONES DE VACIADO
CONTINÚO DE ACEROS AL CARBONO
MODEL FOR ESTIMATING THE WATER FLOW IN CONTINUOUS CASTING
INSTALLATION CARBON STEEL
1
Yusdel Díaz Hernández, 1
Alberto Fiol Zulueta 2
José Arzola Ruiz
1
Unidad Docente Metalúrgica CUJAE, Calle 10522 municipio Cotorro, ydiaz@udm.cujae.edu.cu
2
Centro de estudios matemáticos CEMAT, CUJAE, Calle 114 No 122
RESUMEN. En este artículo se presentó un algoritmo para simular el proceso de vaciado continuo a partir de la construcción de un
modelo físico matemático utilizando el Método de los Elementos Finitos. Como característica más destacada del algoritmo se
encuentra la consideración de los procesos complejos de intercambio de calor, cambio de fase del metal, distribución de temperaturas
en el molde, composición química del metal, flujo de agua en el enfriamiento primario y secundario, y la velocidad de colada. El
algoritmo permitió predecir con suficiente pericia el comportamiento de las variables durante el proceso de vaciado continuo de acero
según perfil y marca del mismo
Palabras claves: simulación, solidificación, vaciado continuo, modelado
ABSTRACT. In this paper an algorithm to simulate the process of continuous casting based on a physical – mathematical model using
finite element methods was presented. The most outstanding characteristic of the model was the inclusion of complex processes of heat
interchange, metal phase changes, distribution of temperatures in the mould, chemical composition of the metal, flow of water in the
primary and secondary cooling system and the casting speed. Moreover, the algorithm permitted to predict the behavior of the process
variables in the continuous casting of steel according to its profile and type
Keywords: simulation, solidification, continuous casting, modeling
I. INTRODUCCIÓN
El proceso de colada continua ha sido uno de los mayores
avances en la producción del acero durante el último siglo.
Esta tecnología comienza a extenderse en los años 60, pero es
a partir de la década del 70 cuando su expansión es más
pronunciada, reemplazando paulatinamente al método
convencional de colado de lingotes.
Durante las últimas décadas las investigaciones de este agredo
se han centrado en su mayoría en el mejoramiento de las
condiciones de operación a partir de modelos físicos,
matemáticos, estadísticos y otros. Diversos autores como T.
Heput [1] trabajan en la actualidad en la modelación y la
simulación del proceso del vaciado continuo.
En la última década, debido a los elevados costes por concepto
de energía, montaje, mantenimiento y explotación de
instalaciones de vaciado continuo pilotos [2] se evidencia que
la generación de tecnologías para el proceso de vaciado
continuo resulta inconcebible sin la ayuda de procedimientos
efectivos de simulación cuyos resultados coincidan con los
experimentos prácticos. Este logro se traduce en un control
eficiente del propio proceso. [3].
Por lo antes expuesto, en el presente trabajo se exponen los
resultados de la experimentación en el sistema de enfriamiento
primario de una Empresa Siderúrgica de referencia nacional y
se formula un modelo físico-matemático del mismo a partir de
los complejos mecanismos de transferencia de calor acero-
molde, distribución de temperaturas en el cristalizador, cambio
de fase y composición química del metal y flujo de agua en el
enfriamiento primario. [4]
II. MATERIALES Y MÉTODOS
Para la obtención de un algoritmo a partir de un modelo
matemático que represente un proceso, se Sigue una
trayectoria desglosada en diferentes pasos [5]:
1. Definición del problema y sus objetivos.
2. Definición de la teoría que sustenta el problema.
3. Descripción de la situación física, si existe, en
términos matemáticos.
4. Solución matemática del modelo.
5. Comparación del modelo con la situación real.
6. Estudio de las limitaciones del modelo.](https://image.slidesharecdn.com/memoria-ix-selasi-2013-lv-150303085824-conversion-gate01/75/Memoria-ix-selasi-2013-lv-228-2048.jpg)
![IX Seminario Euro Latinoamericano de Sistemas de Ingeniería 2013
ISBN 978-980-7630-00-9
212
Es posible además, adquirir una idea mucho más clara del
estudio de cualquier proceso metalúrgico bajo un enfoque
sistémico (Fig. 1), en él se resumen las ideas expresadas
hasta el momento con relación a la modelación [6]. Para
esto se parte de un análisis externo del fenómeno a estudiar
y se descomponen las tareas a resolver más complejas en
sub tareas más sencillas que se analizan internamente
mediante el algoritmo expuesto
Así, diversos autores utilizan esta estrategia para el
modelado de los procesos que intervienen en el vaciado
continuo del acero, realizando adecuaciones según los casos
concretos estudiados. A continuación se exponen algunos de
los resultados más relevantes. En el año 2006,
investigadores de la Universidad de Timisoara, Rumania [7]
crearon un algoritmo para la simulación de la solidificación
del acero en instalaciones de vaciado de tipo radial. Este
algoritmo se centra en el modelado del enfriamiento del
acero en moldes a partir de técnicas heurísticas para generar
soluciones aproximadas del frente de solidificación del
acero líquido. La virtud de estos resultados radica en que se
creó una tendencia a modelar el proceso de colada continua
a partir de modelos matemáticos complejos. [8]
Descripción de la instalación experimental.
La figura 1 muestra la instalación en la que se realizaron los
experimentos. Ella está compuesta por los equipos y los
instrumentos de medición. La descripción de los equipos de
la instalación se trató a inicios de este capítulo.](https://image.slidesharecdn.com/memoria-ix-selasi-2013-lv-150303085824-conversion-gate01/75/Memoria-ix-selasi-2013-lv-229-2048.jpg)
![IX Seminario Euro Latinoamericano de Sistemas de Ingeniería 2013
ISBN 978-980-7630-00-9
215
Paso 0 (Con todas las variables):
10 variable(s) en el modelo. 87 g.l. para el error.
R-cuadrado = 69,93% R-cuadrado ajustado = 79,93%
Paso 1:
Eliminando variable %S con F para eliminar =0,0241307
9 variable(s) en el modelo. 88 g.l. para el error.
R-cuadrado = 89,03% R-cuadrado ajustado = 81,2%
Paso 2:
Eliminando variable %Cu con F para eliminar =0,131321
8 variable(s) en el modelo. 89 g.l. para el error.
R-cuadrado = 90,16% R-cuadrado ajustado = 90,16%
CME = 1,31646
Paso 3:
Eliminando variable %P con F para eliminar =0,54442
7 variable(s) en el modelo. 90 g.l. para el error.
R-cuadrado = 99,93% R-cuadrado ajustado = 99,93%
CME = 1,3098
APORTE = 3,69315E6 + 3317,25*%C - 119398,*%Mn - 121,595*lN%C + +91247,3*LN%Mn +
1463,94*LNP - 569732,*LNT - 2214,35*LNVcol - 238,379*P + +363,445*T+ 1633,11*T + 1509,84*Vcol
(2)
El modelo obtenido ( 2) expresa el consumo específico de
agua en el molde dependiendo del %C, %Mn, presión de
agua a la entrada del cristalizador en Bar, velocidad de
colada en m/min y temperatura de la artesa ºC. Como se
puede ver, el %C. a priori resalta que la velocidad de
colada, es inversamente proporcional al aporte.
Físicamente esto se explica porque el contenido de carbono
disminuye el punto de fusión del acero por lo que conserva
mejor la temperatura, mientras mayor es el contenido de
carbono. El caudal de agua extrae el calor del acero y
mientras, mayor sea este, mayor será la cantidad de agua
por unidad de tiempo que circule por el cristalizador.
III. RESULTADOS Y DISCUSIONES
Para comprobar la veracidad de este modelo, se realiza una
corrida de los datos históricos reflejados en las cartas
tecnológicas del mes de octubre del 2011 a partir de los
datos recopilados durante el proceso, obteniéndose para
cada colada un aporte calculado (MaportC), y luego se
comprueba con el aporte real (MAportR) La Tabla 4
muestra un resumen estadístico de estas variables.
Tabla 4. Resumen estadístico de MTMR y MTMC.
MaportC MAportR
Recuento 97 97
Promedio 42,4353 42,4348
Desviación Estándar 1,42 1,81974
Coeficiente de Variación 3,34627% 4,28832%
Mínimo 38,5424 38,625
Máximo 44,3662 45,075
Rango 5,82372 6,45
También se aplica una prueba-t que se basa en la
comparación entre las medias de ambas variables, los
resultados de esta prueba se muestran a continuación:
Suponiendo varianzas iguales: -0,000477162 +/- 0,462259
[-0,462736; 0,461782]
Prueba t para comparar medias
Hipótesis nula: µMAPORTC = µMAPORTR
Hipótesis Alternativa.: µMAPORTC ≠ µMAPORTR
Suponiendo varianzas iguales: t = -0,00203599 valor-P =
0,998378
No se rechaza la hipótesis nula para alfa = 0,05.](https://image.slidesharecdn.com/memoria-ix-selasi-2013-lv-150303085824-conversion-gate01/75/Memoria-ix-selasi-2013-lv-232-2048.jpg)
![IX Seminario Euro Latinoamericano de Sistemas de Ingeniería 2013
ISBN 978-980-7630-00-9
216
De interés particular en esta prueba, es el intervalo de
confianza para la diferencia entre las medias, el cual se
extiende desde -0,462736 hasta 0,461782 y como contiene
al cero es un indicador de que no hay diferencia
significativa entre las variables, lo que se reafirma con el
valor-P calculado que al ser mayor que 0,05 (que se toma
como nivel de significación), no se puede rechazar la
hipótesis nula, lo que representa que no existe una
diferencia significativa entre las medias de ambas variables.
Además se realiza la prueba de Kolmogorov - Smirnov para
comparar las distribuciones de las dos muestras. Los
resultados que se obtienen del procesamiento estadístico
son:
Estadístico DN estimado = 0,14433
Estadístico K-S bilateral para muestras grandes = 1,00514
Valor P aproximado = 0,265456
En este caso, la distancia máxima es 0,14433 y debido a que
el valor-P es mayor o igual que 0,05, no hay diferencia
estadísticamente significativa entre las dos distribuciones.
En la Figura 3 se presenta un gráfico de MAportR y
MApotC donde se observa el comportamiento de ambas
curvas.
Figura 3. Aporte calórico real y simulado.
IV. CONCLUSIONES
Se realiza un experimento en tiempo real donde se
miden las variables usadas en la investigación en
una muestra de 96 coladas, lo que permite la
validación del modelo obtenido, a partir de datos
reales.
Se obtiene el modelo físico-matemático del
enfriamiento primario de la máquina de colada
continua a partir de datos experimentales, el cual
permite explicar el fenómeno con un 99.03% de
nivel de confianza, además se realiza la validación
del modelo a partir de los datos obtenidos de la
producción.
Se valida el modelo con datos tomados de la
producción arrojando resultados satisfactorios.
Se estima el costo total de la investigación en 2850
MN y 900 CUC.
REFERENCIAS
[1] Heput,T, and Berciano V, Modelling and simulations of
continuous casting steel, Revista CENIM, vol 48, 2009,
pp 23-26 . [Consultado el: 16 de octubre del 2011].](https://image.slidesharecdn.com/memoria-ix-selasi-2013-lv-150303085824-conversion-gate01/75/Memoria-ix-selasi-2013-lv-233-2048.jpg)
![IX Seminario Euro Latinoamericano de Sistemas de Ingeniería 2013
ISBN 978-980-7630-00-9
217
Disponible en:
http://revistademetalurgia.revistas.csic.es/112323
ISSN 120-298X
[2] Zarka,J, Intelligent optimal design of complex systems,
Editorial Wards systems, 2008,pp 265-269. ISBN
831-232-869-13
[3] Orrling C, Observations of the melting and
solidification behavior of mold slags, Iron and
Steelmaker. Journal of materials processing technology
(USA), 2000, vol. 27 (1), pp. 53-63, [ Consultado el: 20
de junio del 2011]. Disponible en:
http://www.sciencedirect.com/science/journal/0.95162x
ISSN 095-016-2X
[4] Habert, G, A numerical model for a heat flux DSC:
Determining heat transfer coefficients within a DSC,
Ironmaking & Steelmaking, 2009, vol. 40, p. 12–160.
[Consultado el: 2 de abril de 2011]. Disponible en:
http://www.sciencedirect.com/science/journal/0169131
7 ISSN 016 91317
[5] Janik M, and Dyja H, Modelling of three – dimensional
temperature field inside the mould during continuous
casting of steel. USA.Computer methods in applieds
mecanisc and engineering, 2009. vol. 10 , pp. 62-66,
[Consultado el: 13 de enero del 2009]. Disponible en:
http://www.elsevier.com/locate/jmatprotec/15315410
ISSN 153–154-10
[6] Incropera, F, Fundamentos de transferencia de calor,
2010, Editorial Prentice Hall, pp 213 – 295. ISSN 970-
17-017-04
[7] Hardin, R and Beckerman C, A transient simulation
and dynamic spray cooling control model for
continuous steel casting. Metallurgical and Material
Transactions B. Vol. 34B. 2004. pp 95 – 109.
[Consultado el: 3 de julio del 2009]. Disponible en:
www.elsevier.com/locate/jmatprotec/578582 ISSN 578
582
[8] Viera, B, López S, Modelación Matemática para
Ingenieros Químicos. Pueblo y Educación. 1988,ISBN
909-229-074-00](https://image.slidesharecdn.com/memoria-ix-selasi-2013-lv-150303085824-conversion-gate01/75/Memoria-ix-selasi-2013-lv-234-2048.jpg)























![IX Seminario Euro Latinoamericano de Sistemas de Ingeniería 2013
ISBN 978-980-7630-00-9
252
El problema del diseño de las formas intermedias de las piezas
laminadas no puede ser considerado como una tarea aislada
sino que debe tratarse en el marco de la concepción general
del proceso de laminado. Surge así como objeto de este trabajo
el diseño de las formas intermedias, por ser éstas las que
representan el mayor grado de dificultad y donde habían
venido aplicándose acentuadamente las soluciones empíricas,
se toman además en consideración el diseño de las formas
iniciales de las piezas laminadas (pieza en bruto) y el cálculo
de otros factores de interés tecnológico.
Los denominados sistemas CAD/CAM constituyen un eslabón
importante en los procesos de automatización y empleo de la
microelectrónica en las empresas. Los mismos permiten la
utilización de todos los recursos de ésta en forma integrada, lo
que trae como consecuencia la elevación de la productividad,
el incremento de la calidad en los productos, la disminución de
los costos de producción y la humanización del proceso de
diseño con el consiguiente aumento de la fiabilidad de los
mismos.
II. MATERIALES Y MÉTODOS
Para determinar las formas intermedias necesarias para
obtener un perfil en H laminado en caliente se acepta el
postulado de [Lange K., 1977], que plantea que: “debe
emplearse el concepto de Preformación de Sección
Transversal, entendiéndose esto como: la obtención de una
forma intermedia cuyo perfil se va acercando al de la forma
final de la pieza laminada en una o varias etapas”.
Existen varios autores que se han ocupado con la
determinación de las formas intermedias de las piezas
obtenidas por conformación masiva, estos autores han
aportado los conocimientos fundamentales del tratamiento de
fenómenos típicos de la obtención de piezas por deformación
en caliente, entre ellos tenemos:
[Spies K., 1959.], este autor se ocupó con la obtención de
formas intermedias por preformación de sección transversal,
propone varias reglas básicas a tener en cuenta para lograr un
diseño correcto de las piezas rotacionalmente simétricas por
este procedimiento. Estas reglas proclamadas por SPIES son
válidas y fundamentales para lograr un proceso de diseño
correcto de las piezas rotacionalmente simétricas por
preformación de la sección transversal de las mismas, pero
adolecen de no brindar valores recomendados o expresiones
que permitan calcular los parámetros a que hace referencia.
[Lange K. y otros, 1977.], estos autores dividen en tres grupos
las piezas forjadas con sección transversal en H según la
relación entre la altura (h) y el ancho (b) del nervio de éstas.
Ellos plantean que las secciones transversales en H con una
relación h/b < 2 pueden ser conformadas sin preformación de
la sección transversal, para nervios con relaciones h/b > 2 es
indispensable la existencia de una forma intermedia previa.
LANGE no contemplan o brindan reglas que permitan
automatizar el proceso de diseño de las formas intermedias de
las piezas conformadas, a no ser la relación entre la altura h y
el ancho b del nervio de la pieza con sección transversal en H,
las cuales no representan la totalidad de las posibles
configuraciones de secciones transversales.
Figura 1: Ejemplos de preformación de la sección transversal
[Fuente: Spies K., 1959]
Figura 2: Preformación de la sección transversal para la
forja de perfiles H en martillos. [Fuente: Lange K. y otros,
1977.]
[Altan T., 1983], este autor se ha ocupado con el diseño y
fabricación de estampas de forja para el preestampado con
auxilio de la computación. Ellos basaron su trabajo en la
obtención de piezas forjadas para la industria aeronáutica
donde es frecuente la posibilidad de descomposición de piezas
de secciones transversales complejas en secciones más simples
en forma de "L" que luego de procesadas se vuelven a
integrar, este método puede ser empleado solamente para
piezas de forma relativamente sencillas, en el caso de piezas
más complejas se presentarían muchos inconvenientes.](https://image.slidesharecdn.com/memoria-ix-selasi-2013-lv-150303085824-conversion-gate01/75/Memoria-ix-selasi-2013-lv-269-2048.jpg)
![IX Seminario Euro Latinoamericano de Sistemas de Ingeniería 2013
ISBN 978-980-7630-00-9
253
Figura 3: Flexibilidad en la determinación de las formas
intermedias para perfiles en “L”. [Fuente: Altan T., 1983]
[Mathieu H. y otros, 1980], estos autores presuponen que sólo
por medio de un empleo sistemático de las técnicas de
computación, es factible para el diseñador obtener las formas
intermedias de las piezas forjadas. El procedimiento propuesto
por ellos consta de:
Empleo de la computación.
Empleo de técnicas de investigación.
Ensayos de forja
Estos autores propusieron un sistema basado en las reglas
proclamadas por SPIES para la preformación de la sección
transversal de las piezas conformadas y brinda una solución
adecuada, no obstante su método es extremadamente laborioso
y difícil de aplicar en las medianas y pequeñas industrias.
Figura 4: Diagrama de flujo para la determinación de la
preformación de la sección transversal [Fuente: Mathieu H. y
otros, 1980]
[Bruchanov A.N. y otros, 1955], estos autores se ocuparon con
el diseño de las formas intermedias para piezas con secciones
transversales en forma de H con paredes centrales finas. Estas
secciones transversales han sido divididas por ellos en dos
grupos de acuerdo con la relación existente entre la altura (h) y
el espesor (b) del nervio, El inconveniente fundamental de este
procedimiento radica en que los perfiles en H representan un
bajo por ciento del total de piezas que se conforman, a pesar
de esto el método tiene la virtud de emplear algunas
ecuaciones para el cálculo de determinadas partes de las
formas intermedias entre las que se destacan los valores de los
radios de redondeos para las formas intermedias obtenidos a
partir de los radios de redondeos de las formas finales.](https://image.slidesharecdn.com/memoria-ix-selasi-2013-lv-150303085824-conversion-gate01/75/Memoria-ix-selasi-2013-lv-270-2048.jpg)
![IX Seminario Euro Latinoamericano de Sistemas de Ingeniería 2013
ISBN 978-980-7630-00-9
254
Figura 5: Forma intermedia para secciones transversales en
forma de “H”. [Fuente: Bruchanov A.N. y otros, 1955]
[Chamouard A., 1964], este autor recomienda la utilización de
curvas exponenciales para facilitar el flujo del metal dentro del
grabado, el volumen de la forma intermedia corresponde con
el volumen de la forma final, más el volumen de material que
pasa a la rebaba. Chamouard tiene la virtud de haber utilizado
por primera vez expresiones numéricas para el diseño de
formas intermedias de piezas forjadas, a pesar de eso su
método presenta las siguientes insuficiencias:
Para garantizar la invariabilidad del volumen se tienen que
emplear ecuaciones no lineales cuyas soluciones son muy
problemáticas.
La curva exponencial perdería libertad de variación de la
relación pared-nervio, esto ocurre cuando corta la pared
central en el punto E, que no representa una transición
tangencial (canto agudo), y eso es indeseado en los
procesos de forja.
Figura 6: Forma intermedia propuesta por CHAMOUARD
[Fuente: Chamouard A., 1964]
[Haller H., 1986], este autor se ocupó con la creación de un
sistema CAD para el diseño de estampas de forja que se basó
en las siguientes consideraciones sobre las formas intermedias:
El proceso de forja se lleva a cabo mediante un procedimiento
no continuo de transformación de la forma inicial (pieza en
bruto), hasta llegar a la forma final de la pieza forjada, el éxito
de este proceso depende de la fluidez de la masa de la forma
inicial sin ser forzada y paulatinamente hacia las formas
intermedias, además el grabado final debe poseer una forma
tal que permita el flujo adecuado del material, es decir,
mientras que una parte del material debe ser aplastada o
recalcada, otra debe fluir como en un proceso de extrusión.
Este método presenta las siguientes restricciones:
El redondeo de los cantos y los empalmes entre las
diferentes secciones son omitidos durante el cálculo debido
a su escasa influencia en los mismos y estos en la realidad
representan un volumen considerable de material.
El programa es válido sólo para piezas forjadas que han
sido obtenidas mediante un proceso de compresión y de
extrusión simultáneo, caso que no recoge la generalidad de
posibilidades.
[Yu G. B. y otros, 1985], estos autores logran unificar varios
de los criterios tratados de forma independiente por otros de
los autores anteriormente citados, estos principios son:
Figura 7: Diagrama de flujo del sistema propuesto por Yu y
Dean [Fuente: Yu G. B. y otros, 1985]](https://image.slidesharecdn.com/memoria-ix-selasi-2013-lv-150303085824-conversion-gate01/75/Memoria-ix-selasi-2013-lv-271-2048.jpg)
![IX Seminario Euro Latinoamericano de Sistemas de Ingeniería 2013
ISBN 978-980-7630-00-9
255
Se considera que existirá igualdad de volumen entre la
forma final de la pieza forjada más la rebaba y la forma
intermedia correspondiente a ésta.
La forma intermedia será menor en dimensiones
(diámetro) que la forma final de la pieza forjada en la
superficie de división de la figura, esto lo hacen con el
objetivo de evitar el desgaste prematuro del grabado final
y lograr un adecuado acomodamiento de la forma
intermedia en el grabado de la forma final.
El volumen es calculado a partir de la integración de
discos infinitesimales supuestos en la sección transversal.
A pesar de sus logros, este sistema no puede generalizarse
para todos los tipos de piezas rotacionalmente simétricas,
siendo su mayor inconveniente el no poder realizar un
tratamiento diferenciado a las pendientes de las rectas que
representan el contorno de la pieza forjada y que coinciden en
la línea de división de la misma, lo que trae como
consecuencia la obtención de resultados no precisos en los
cálculos y recálculos de volúmenes.
[Ojrimenko M., 1966], este autor brinda un conjunto de
recomendaciones obtenidas a partir de procesos de
experimentación y acumulación de experiencias en trabajos
prácticos en fábricas, la desventaja principal de este método
radica en que adolece de la presencia de ecuaciones que
puedan ser generalizadas a la totalidad de las piezas
rotacionalmente simétricas.
Figura 8: Variantes de estampado para piezas
rotacionalmente simétricas [Fuente: Ojrimenko M., 1966]
[Yanazawa T, y otros, 1981], estos autores brindan una valiosa
información sobre la correlación de las dimensiones entre la
forma inicial (slab) y obtención del Dog Bone, también brinda
información sobre la correlación entre el Dog Bone y el Beam
Blank y de este con el perfil sencillo en H
Figura 9: Obtención del Beam Blank a partir de la forma
inicial rectangular (Slab) y obtención del perfil en H a partir
del Beam Blank en un proceso de laminado convencional.
[Fuente: Yanazawa T, y otros, 1981]
Figura 10: Formacion de del Dog Bone a partir del Slab,
formacion del Beam Blank a partir del Dog Bone y obtencion
del perfilen H a partir del Beam Blank por un nuevo metodo
de laminado [Fuente: Yanazawa T, y otros, 1981]
III. RESULTADOS Y DISCUSIONES
Formulación de los Principios para el Diseño
Computarizado de las Formas Intermedias de las Piezas
Conformadas en caliente.
Para poder realizar un tratamiento adecuado durante el
proceso de diseño de las formas intermedias de los perfiles en
H laminados en caliente con auxilio de la computación, se
hace necesario respetar un grupo de principios imprescindibles
de los cuales depende la posibilidad de cuantificación del
proceso, como única vía de poder algoritmizar el problema y
lograr el éxito en los resultados finales. A estos principios se
ha llegado luego de un profundo estudio de la bibliografía
especializada y los mismos pueden resumirse de la forma
siguiente:
1. El área de la sección transversal de la forma inicial (Slab)
o previa (Dog Bone o Beam Blank) debe ser (30 -40) %
mayor que el área de la sección transversal de la forma
final o posterior a obtener durante todo el proceso de
laminado, con el objetivo de garantizar suficiente material
a deformar para la correcta obtención de estas piezas
mediante el proceso de laminado en caliente.](https://image.slidesharecdn.com/memoria-ix-selasi-2013-lv-150303085824-conversion-gate01/75/Memoria-ix-selasi-2013-lv-272-2048.jpg)
![IX Seminario Euro Latinoamericano de Sistemas de Ingeniería 2013
ISBN 978-980-7630-00-9
256
2. La altura de la secciones transversales de la forma inicial
(Slab) y/o de las formas intermedias deben ser mayor que
las alturas de las secciones transversales de la forma final o
precedentes, lo que implica que el ancho de éstas seas
menor, para esto se deben emplear las correlaciones
brindadas por Yanazawa T. y otros [Yanazawa T, y otros,
1981], ello se debe garantizar con el objetivo de evitar el
desgaste prematuro de los juegos de rodillos necesarios
para obtener las diferentes formas intermedias y lograr la
entrada adecuada de las formas intermedia en los grabados
posteriores de los rodillos para la obtener la forma final.
Para procesos convencionales de laminado son válidas las
correlaciones: (ver figura 9)
Wi / Wb = 0.95 ~ 0.98…………………………...…(3.1.1)
B / Bp = 1.10 ~ 1.70…………………….….….…....(3.1.2)
0 <= wp – Wk <= 30……………………………..…(3.1.3)
0 <= Wk – Wb <= 10………………………….…..(3.1.4)
Wk – Wb <= 40……………………………………..(3.1.5)
/ Lp – Lk / <= 10………………………….………(3.1.6)
/ Lk – Lb / <= 20………………………….…..…..(3.1.7)
Para procesos especiales de laminado son válidas las
correlaciones: (ver figura 10)
W1 / Wb = .4 ~ 2.0……………………..….…..….(3.1.8)
B / Bp = 0.5 ~ 1.0………………………..………..(3.1.9)
3. Los radios de redondeo de las formas intermedias deben
ser mayores que los radios de redondeo de las formas
finales, con el objetivo de facilitar el flujo del metal en el
grabado y disminuir el desgaste prematuro o posibles
concentraciones de tensiones, para el cálculo de estos
radios, se deben emplear las ecuaciones propuestas por
Bruchanov y Rebelski [Bruchanov A.N. y otros, 1955].
(ver figura 5)
R2 = 1.2 Rf + 3 mm.............(3.1.10), para radios
cóncavos
R2 = 1.5 Rf..........................(3.1.11), para radios
convexos
4. Las inclinaciones laterales de las formas intermedias deben
ser iguales a las inclinaciones de las formas finales en su
defecto emplear valores entre 6 y 9 0
.
5. Se supone que durante la obtención de la forma intermedia
no se pierde material, esto es con el objetivo de lograr un
control efectivo de la constancia de volumen entre la forma
final y las formas intermedias que se procesan. El volumen
debe ser calculado a partir de esta invariabilidad del
volumen y teniendo en cuenta las siguientes expresiones:
V1 = V0 = Constante…….……….……………….(3.1.12)
V1 = A1.L1...............................................................(3.1.13)
V0 = A0.L0……………………….…….………….(3.1.14)
donde: A1 - Área de la sección transversal de la preforma.
L1 - Longitud del material que formará la preforma.
A0 - Área de la sección transversal de la forma inicial.
L0 - Longitud del material de la forma inicial.
La corrección de este volumen debe realizarse a partir de la
disminución o aumento de la longitud de la forma final o
intermedia, cumpliendo con el principio de la
invariabilidad del volumen.
6. Se hace absolutamente necesario brindar la posibilidad de
un trabajo interactivo que permita al usuario según su
experiencia y conocimiento, decidir sobre los resultados
brindados por la computadora.
Estos principios formulados, constituyen el aporte principal de
este trabajo, a su vez representan las bases sobre las que se
sustentan los otros resultados a que se arribaron en esta
investigación.
Concepción y aseguramiento matemático del diseño
automatizado de los procesos de laminado en caliente.
Para diseñar una nueva familia de formas intermedias de
perfiles sencillos laminados en caliente, es necesario seguir
una secuencia lógica de pasos y ajustarse a los Principios para
el Diseño Computarizado de las Formas Intermedias de las
Perfiles que ya fueron proclamados en el apartado anterior.
Teniendo en cuenta estos, se ha concebido un Sistema
para el Diseño de Formas Intermedias de Perfiles Sencillos
en H Laminados en Caliente (DiproINTER) que se muestra
en la figura 11.
El sistema DiproINTER consta de los siguientes módulos:
Captura de Información: Es el encargado de obtener la
información introducida por el usuario (datos), en
cualquier momento del proceso de trabajo del sistema,
ejemplos: tipo de perfil, material, dimensiones, etc.
Edición de Base de Datos de Perfiles: Este módulo se
encarga de editar las bases de datos de perfiles, con el
objetivo de eliminar elementos o adicionar nuevos.
Reconocimiento Gráfico: Es el encargado de reconocer
a partir del dibujo del perfil o de la edición de
perfiles las propiedades de las entidades o cambios
generados en estas, ejemplos radios, longitudes, ángulos,
etc.
Procesamiento Gráfico: Es el encargado de procesar toda
la información que el usuario introduce y que provocan
cambios a los perfiles existentes en la base de datos o
cuando introduce nuevos perfiles encargándose de
actualizar la información en dicha base de datos.
Cálculo Ingenieril: Se encarga de realizar todos los
cálculos (ecuaciones) que caracterizan el proceso y](https://image.slidesharecdn.com/memoria-ix-selasi-2013-lv-150303085824-conversion-gate01/75/Memoria-ix-selasi-2013-lv-273-2048.jpg)
![IX Seminario Euro Latinoamericano de Sistemas de Ingeniería 2013
ISBN 978-980-7630-00-9
257
devolver los resultados a las funciones por las cuales fue
invocado, cálculo del número de pasos de laminado,
cálculo de los parámetros geométricos de las variantes
intermedias, etc.
Optimización: Es el encargado de buscar soluciones
Óptimas a problemas asociados a estos procesos,
ejemplo: costo del herramental, costo por conceptos de
consumo de energía, calidad del producto, etc.
Diseño del herramental: Se encarga, a partir del cálculo
del número de pasos de laminado, cálculo de los
parámetros geométricos de las variantes intermedias,
de diseñar los juego de rodillos necesarios para obtener el
perfil.
Memoria descriptiva: Es el encargado de brindar toda la
documentación técnica asociada al proceso de diseño y
facilitar los informes para la organización del proceso.
Figura 11: Concepción del sistema para el diseño de formas
intermedias de perfiles sencillos laminados en caliente
(DiproINTER)
Elaboración automatizada de la documentación
tecnológica.
La elaboración automatizada de la documentación tecnológica
en los sistemas ingenieriles computarizados, constituye un
componente fundamental de estos sistemas, la preparación de
la tecnología está vinculada no sólo a la realización de
cálculos de gran complejidad, a la utilización de métodos
modernos de simulación y optimización, sino que la
evaluación de las diferentes soluciones estudiadas dependen,
frecuentemente, de información que sólo se puede obtener a
partir de representaciones gráficas. De poco sirve un sistema
que permita preparar decisiones de alta racionalidad, si estas
no pueden ser representadas oportunamente en la forma
adecuada para su correcta implementación práctica. [Arzola
Ruiz J., 2001]
El sistema deber· ser lo suficientemente flexible y admitir
formatos de ficheros de dibujo estándares, que aseguren su
compatibilidad con otros sistemas CAD, por esta razón se
admitirán dibujos en formatos DXF, STEP y DWG.
Los perfiles que serán procesados por el sistema, deberán
ser dibujados con anterioridad en los formatos
especificados y se prefiere su ubicación en subdirectorios
desde donde serán solicitadas por el programa en su
debido momento. No obstante, si el usuario no ha dibujado la
pieza con anterioridad, tiene la posibilidad de dibujarlos con el
sistema CAD que sirve de plataforma a DiproINTER y su
geometría puede ser incorporada a la Base de Datos de perfiles
del sistema.
Una vez que se elige un perfil de la base de datos o se dibuja
uno nuevo por el usuario, el sistema captura la información
geométrica del mismo y a partir de ella genera un conjunto de
nuevas entidades que corresponden a las diferentes formas
intermedias necesarias. Éstas nuevas entidades representan
las secuencias de conformado y constituirán las formas
geométricas a obtener en la batería de rodillos para obtener el
perfil sencillo final.
Implementación de los procedimientos para la
automatización del diseño de baterías de rodillos.
Después de concebido el sistema y definida las funciones
de cada uno de los módulos que lo integran, lo cual se
desarrolla a partir de la bibliografía consultada y según la
metodología de diseño propuesta, se procede a la
implementación del Sistema DiproINTER que tiene como
soporte al Sistema Gráfico Profesional AutoCAD, de la firma
AutoDesk y al lenguaje de programación AutoLisp. El
esquema del algoritmo de cálculo en que se sustenta el mismo
se representa en la figura 12
La tarea consiste en el procesamiento de los datos
introducidos por el usuario o seleccionados de la base de
datos para el diseño de las formas intermedias necesarias
en la obtención de un nuevo perfil laminado sencillo final.
El software implementado es un sistema CAD que facilita el
cálculo ingenieril y la representación gráfica en el proceso de
diseño de las formas intermedias necesarias para obtener un
perfil en H. El sistema cuenta con herramienta que permiten
la selección, modificación y actualización de entidades en
su base de datos. Garantiza además la captura y
evaluación de los datos suministrados para el cálculo,
proporcionando una salida gráfica, que satisface las exigencias
del proceso de diseño de estas piezas.](https://image.slidesharecdn.com/memoria-ix-selasi-2013-lv-150303085824-conversion-gate01/75/Memoria-ix-selasi-2013-lv-274-2048.jpg)
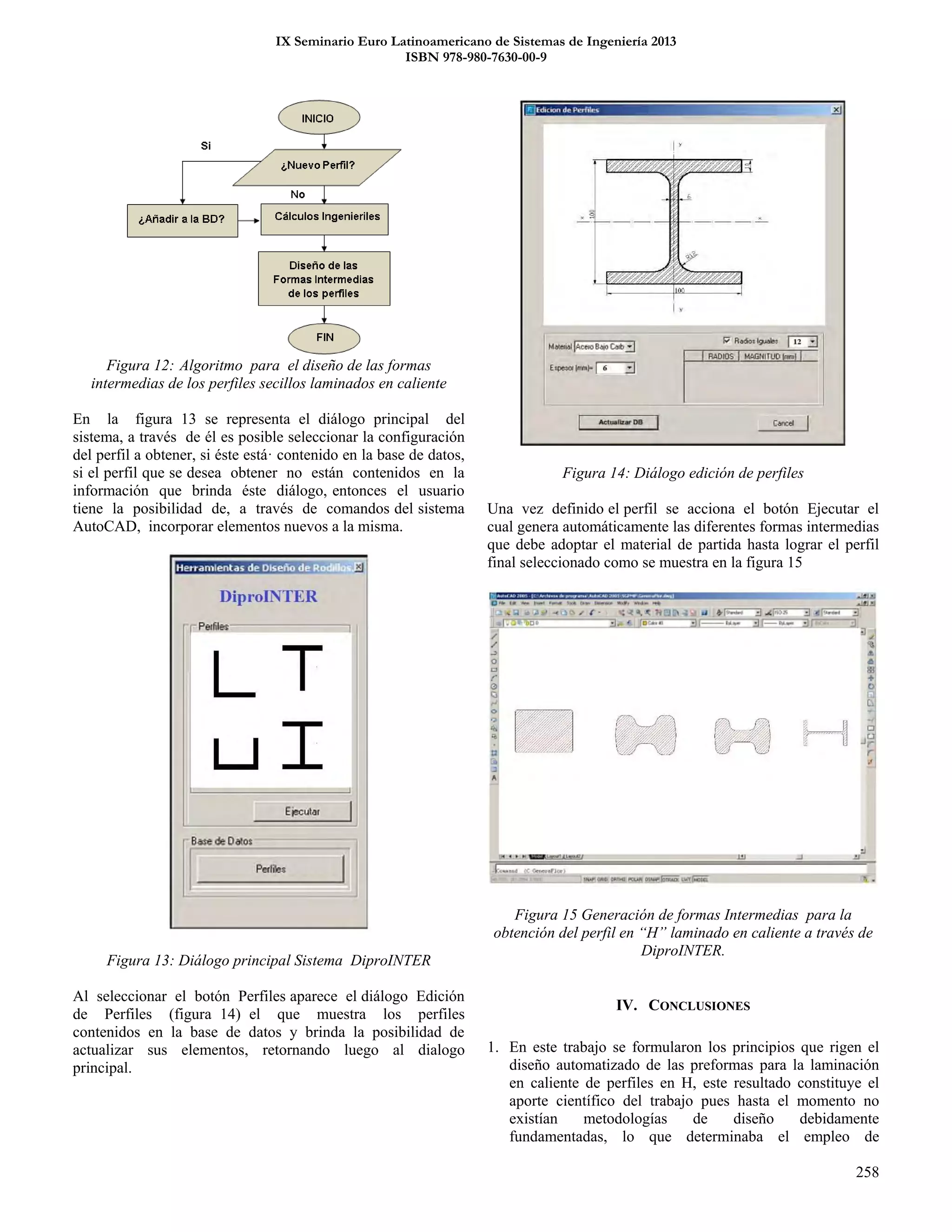






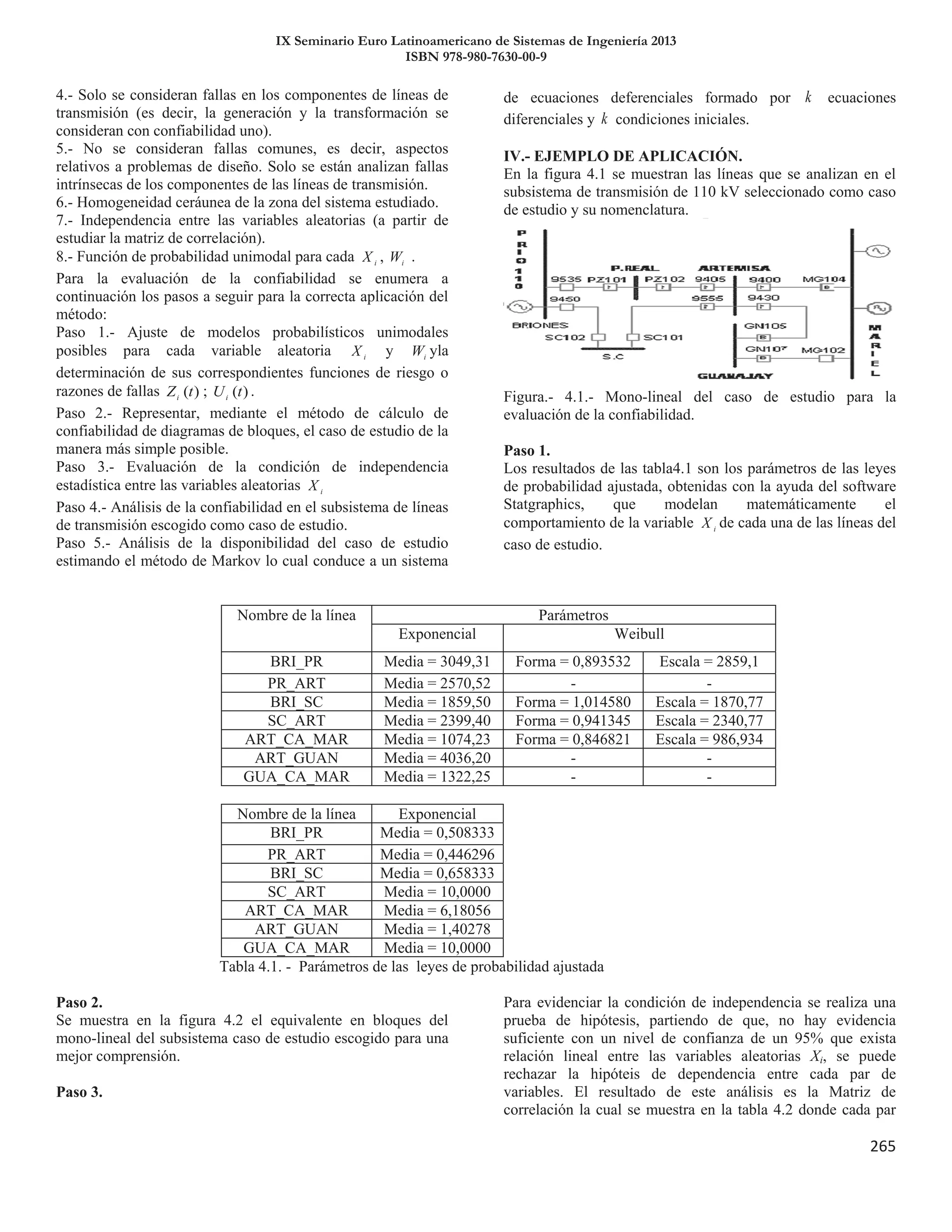
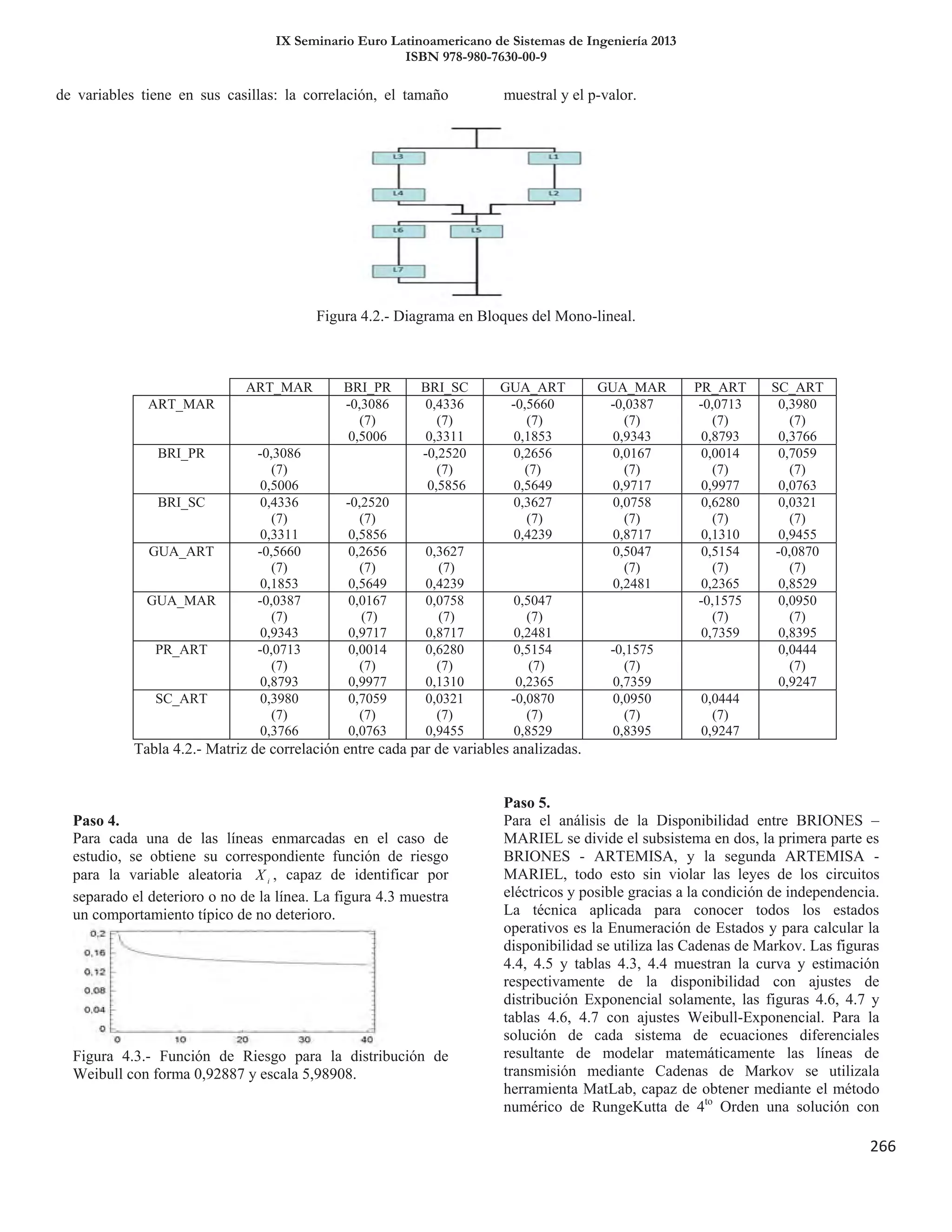




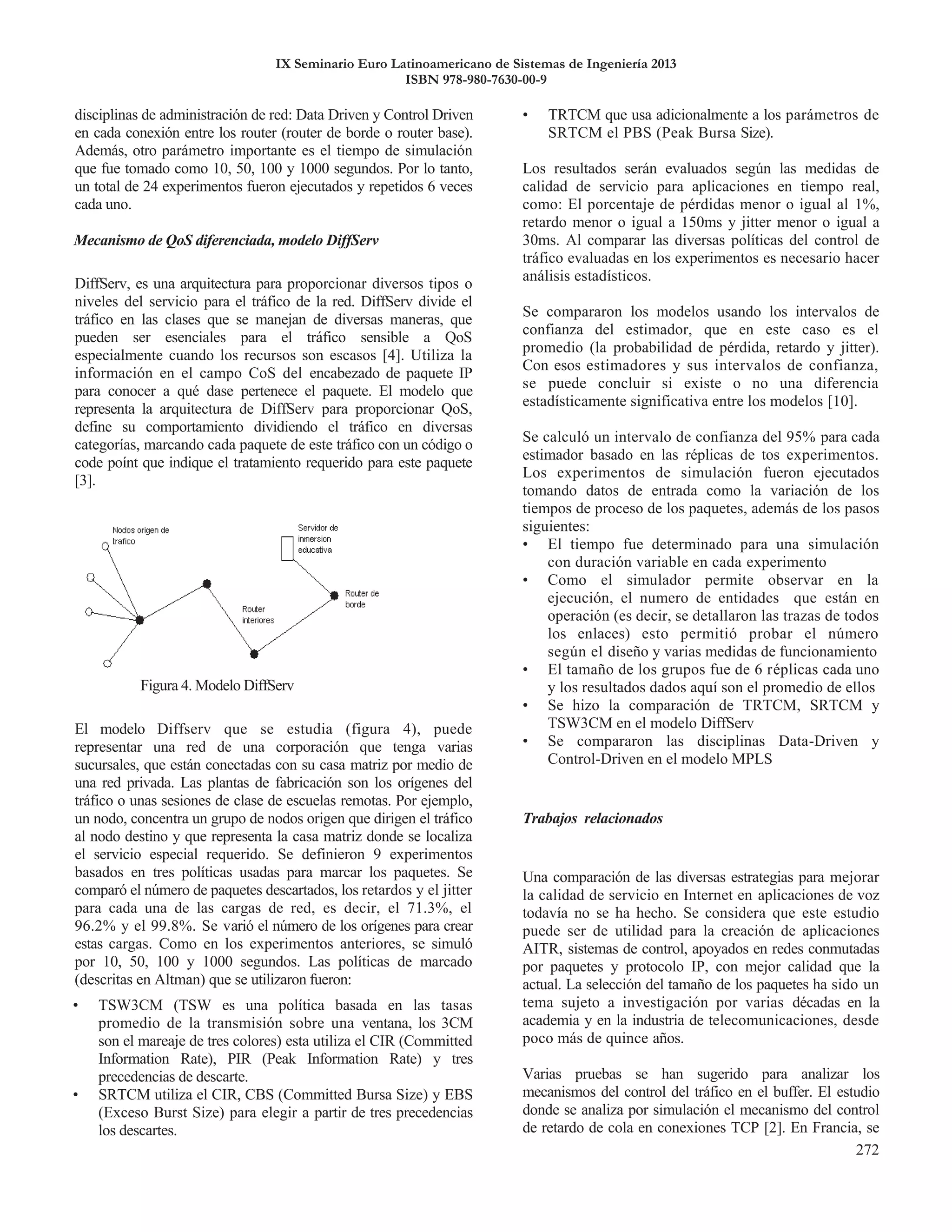







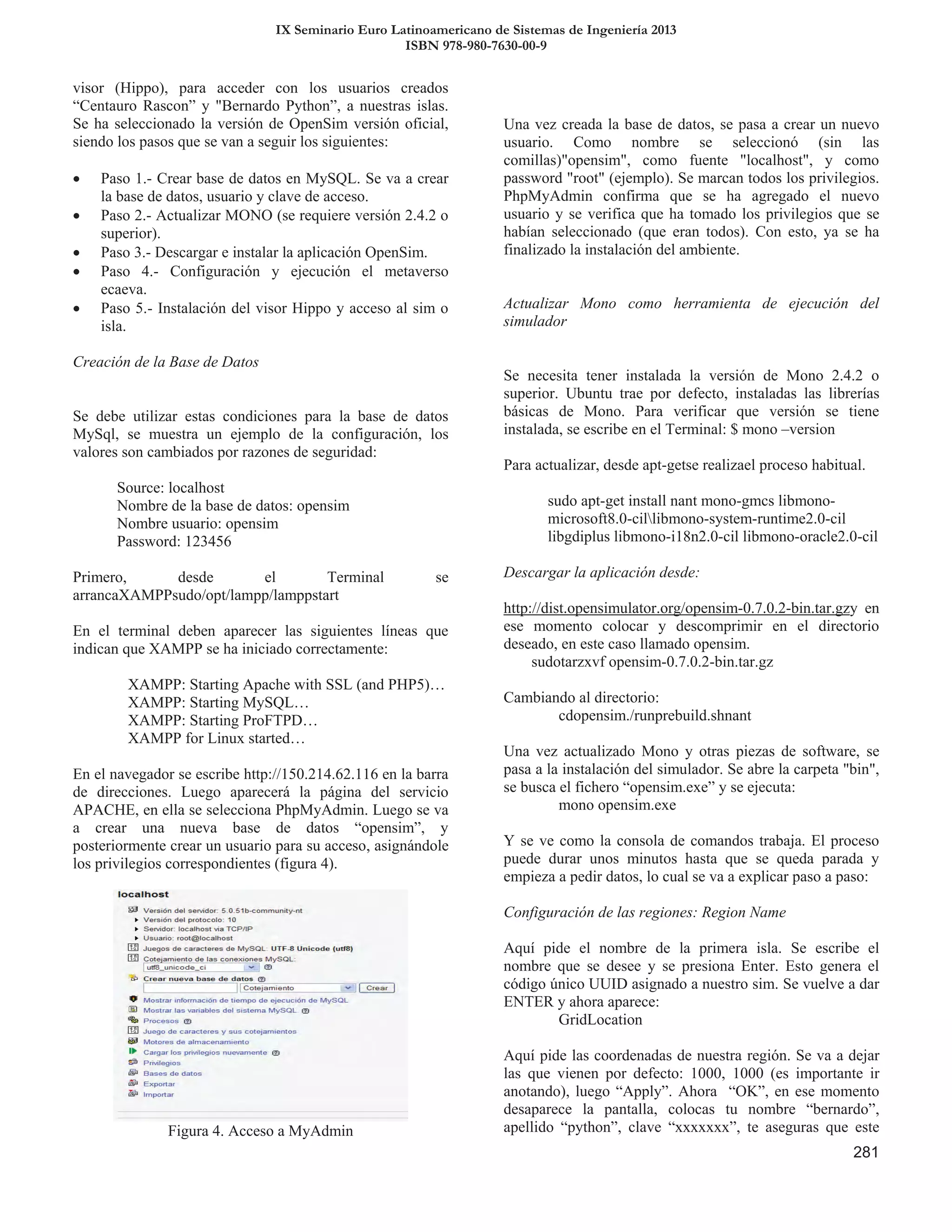




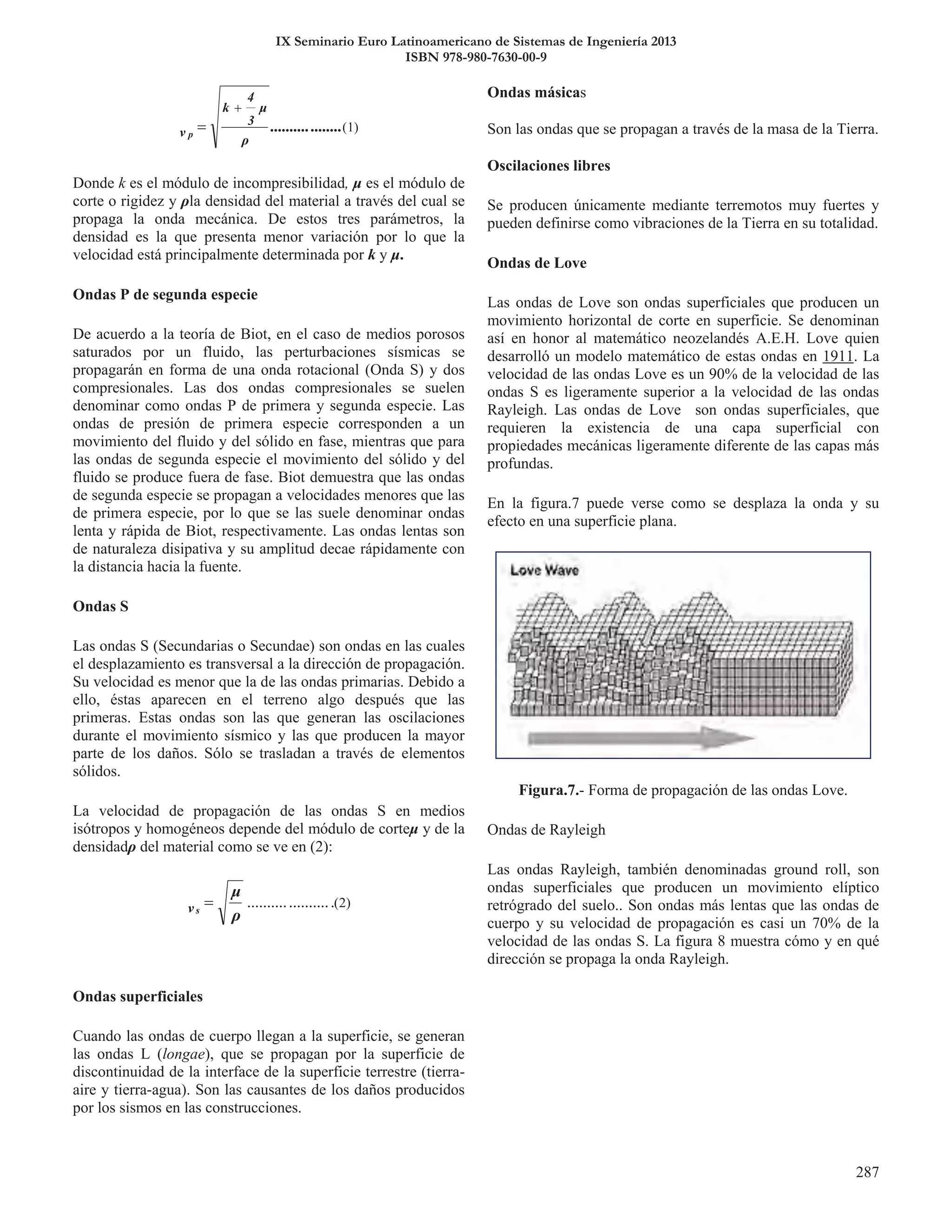

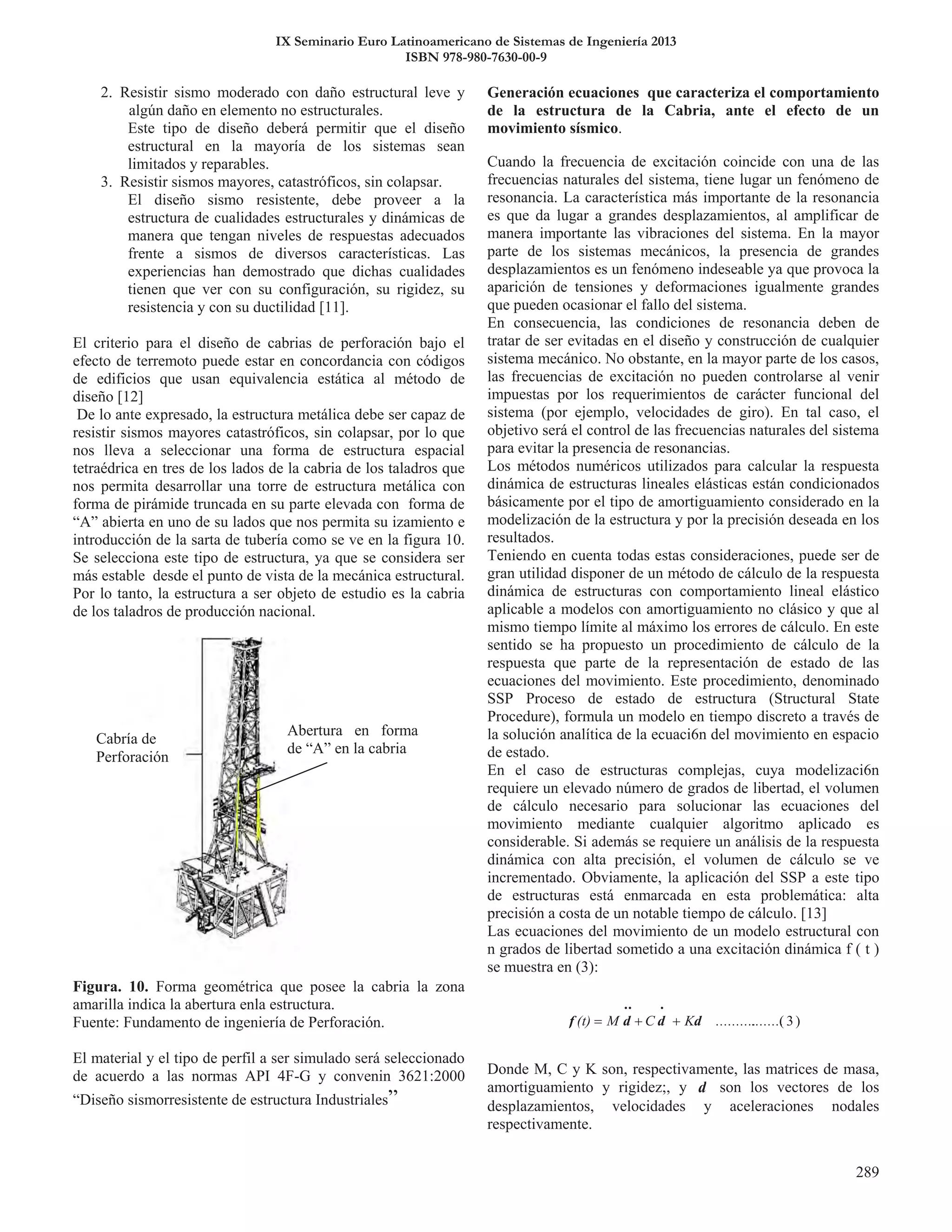



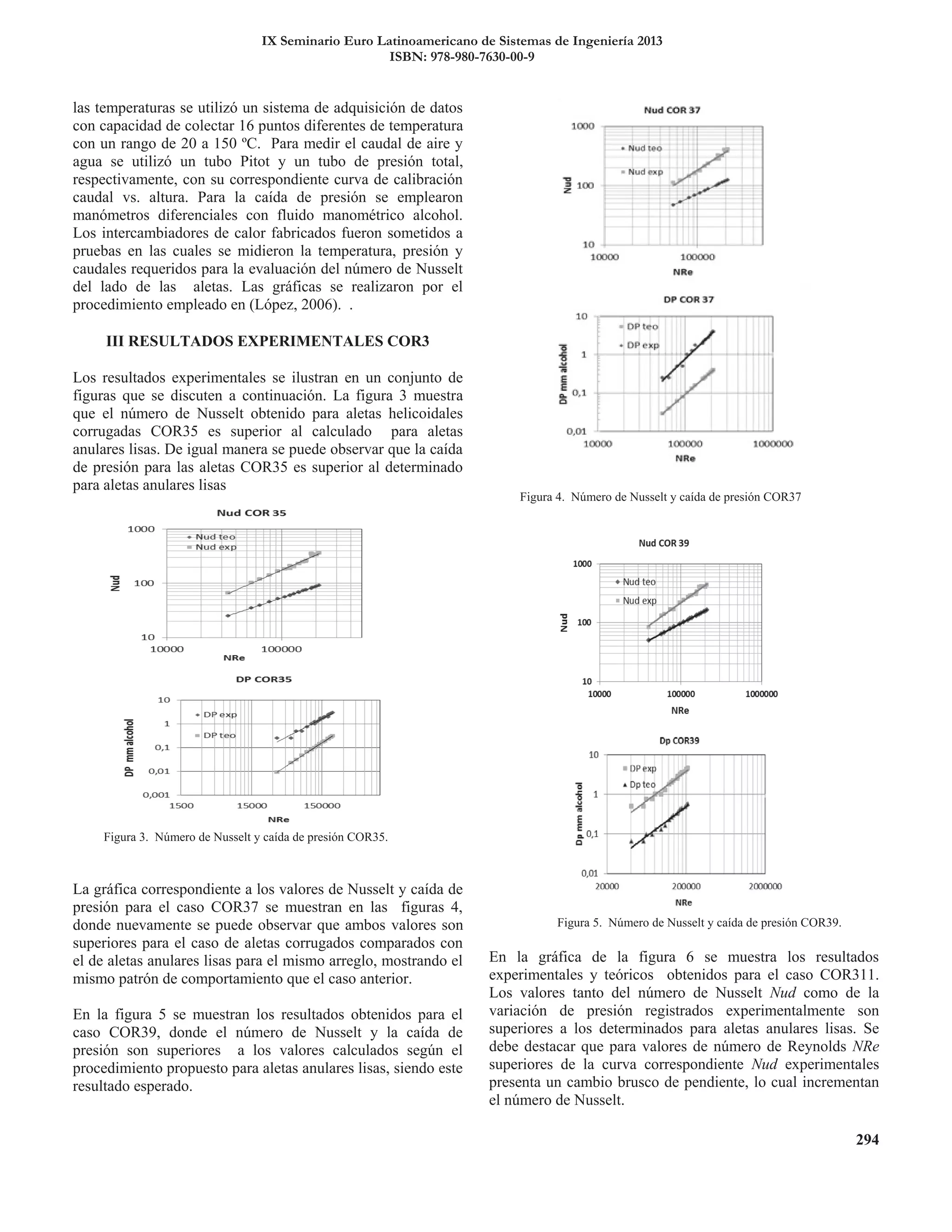
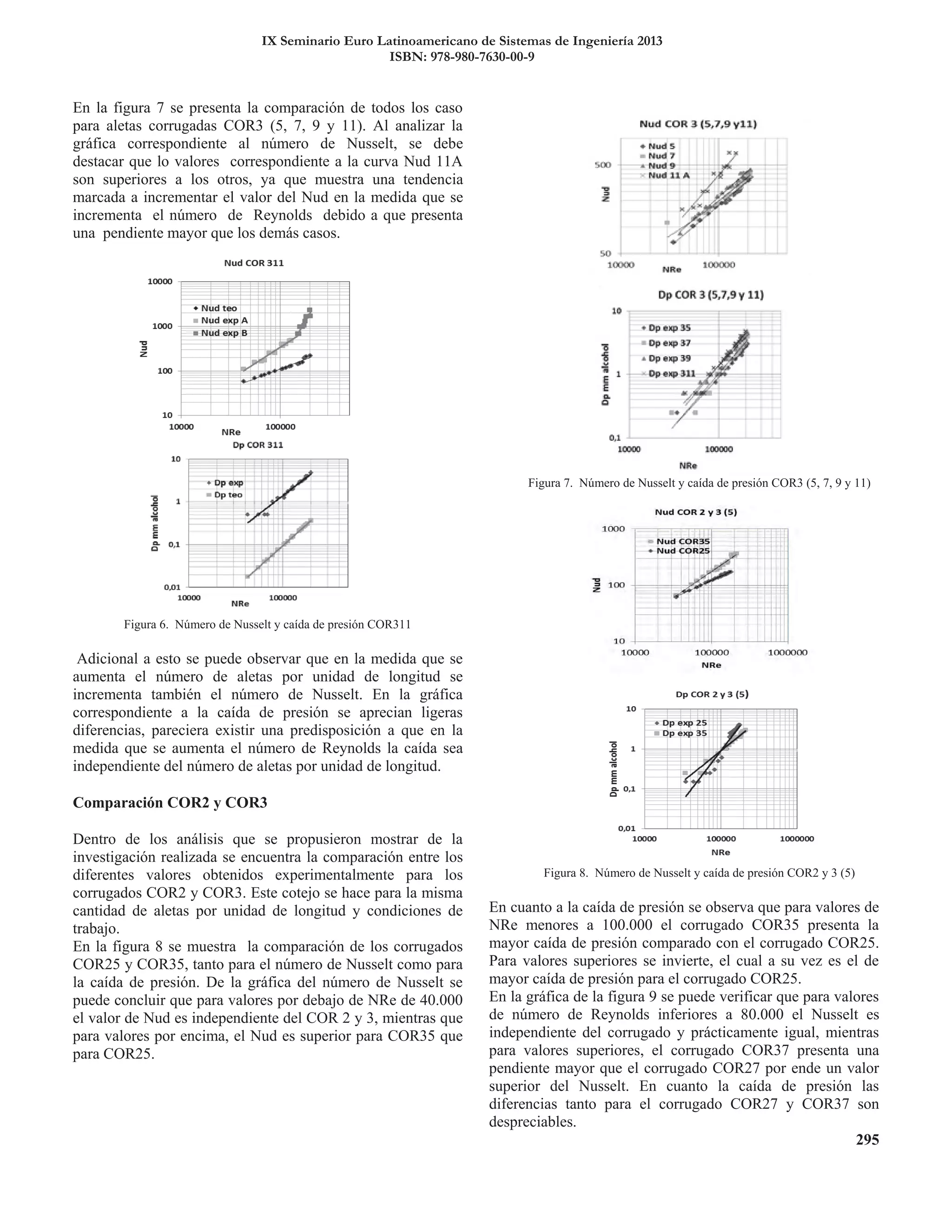

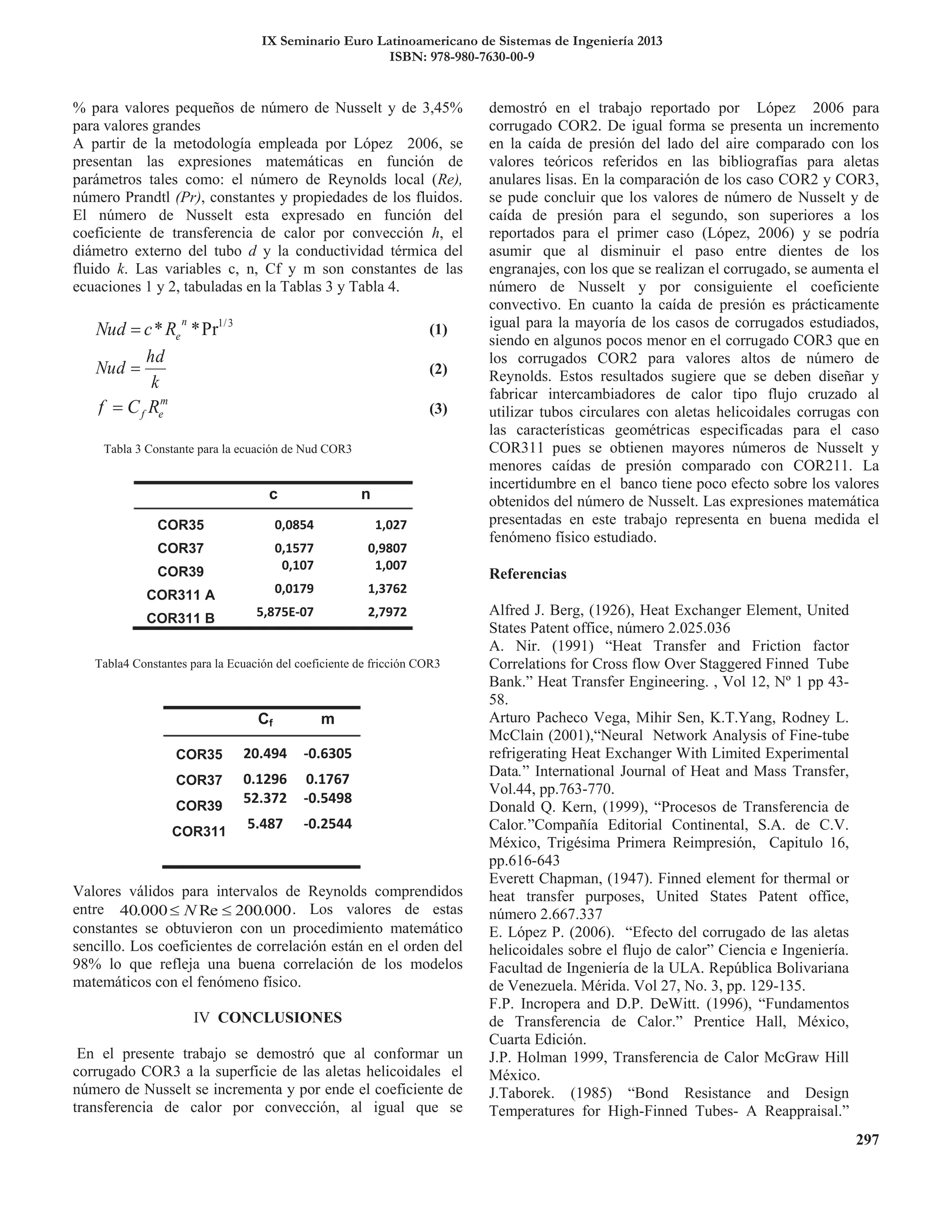



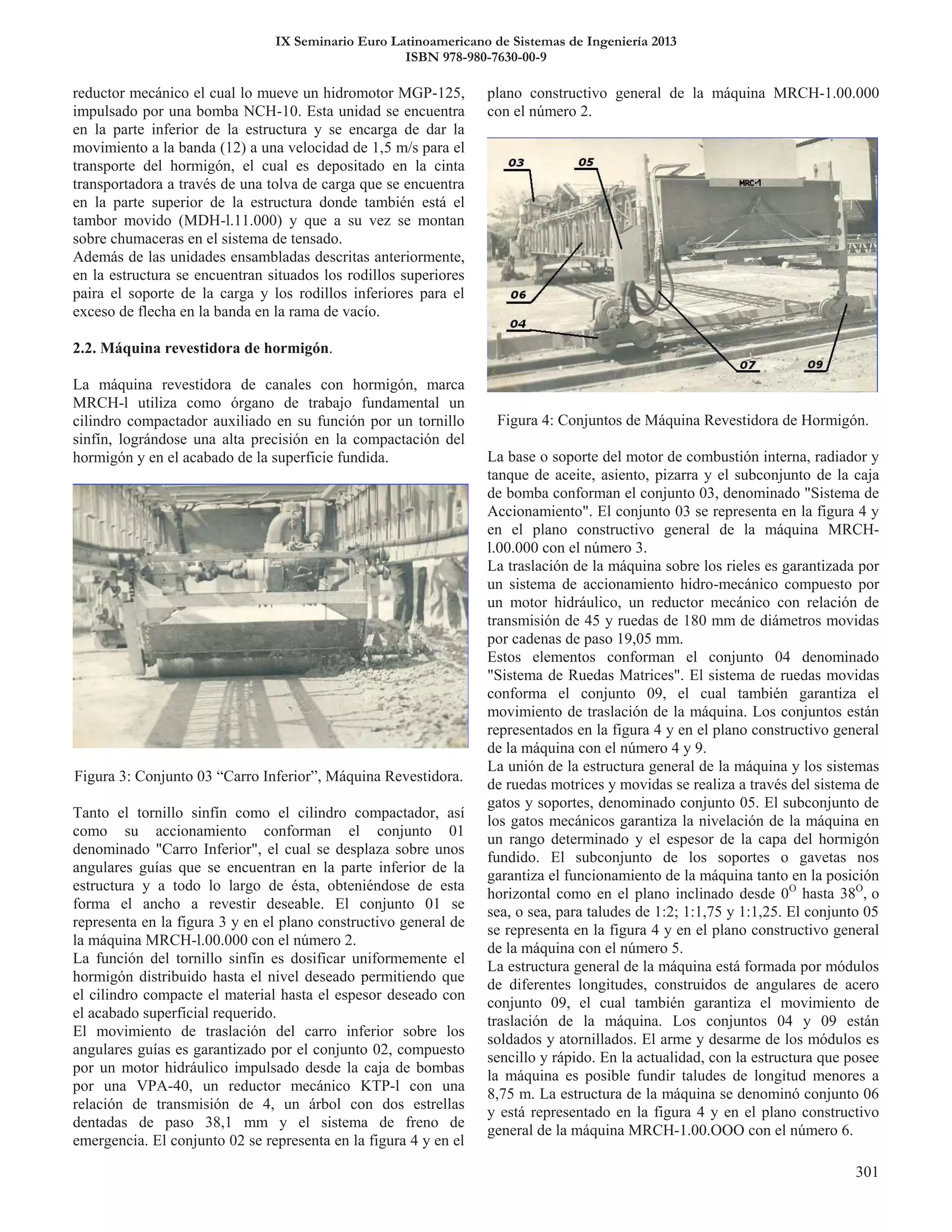
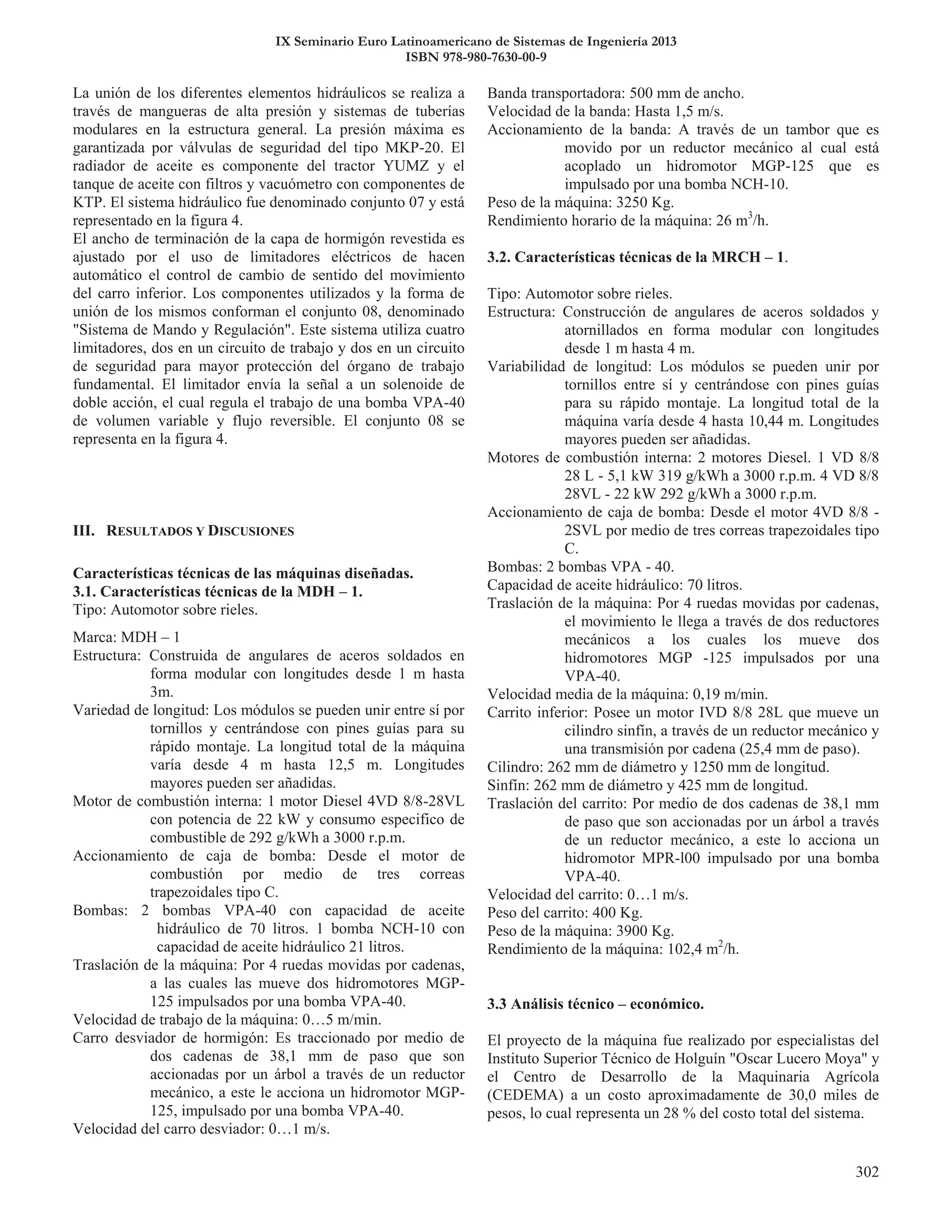

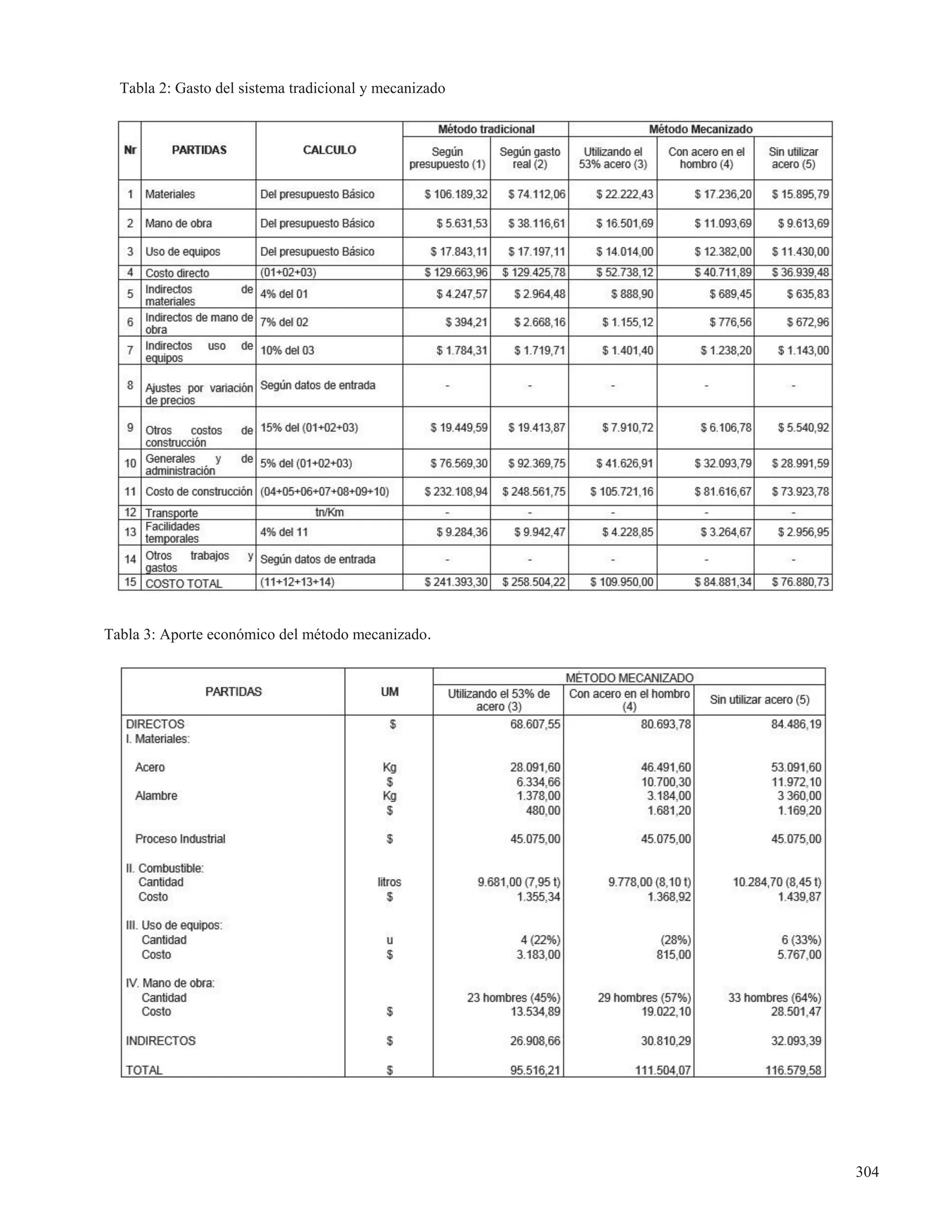





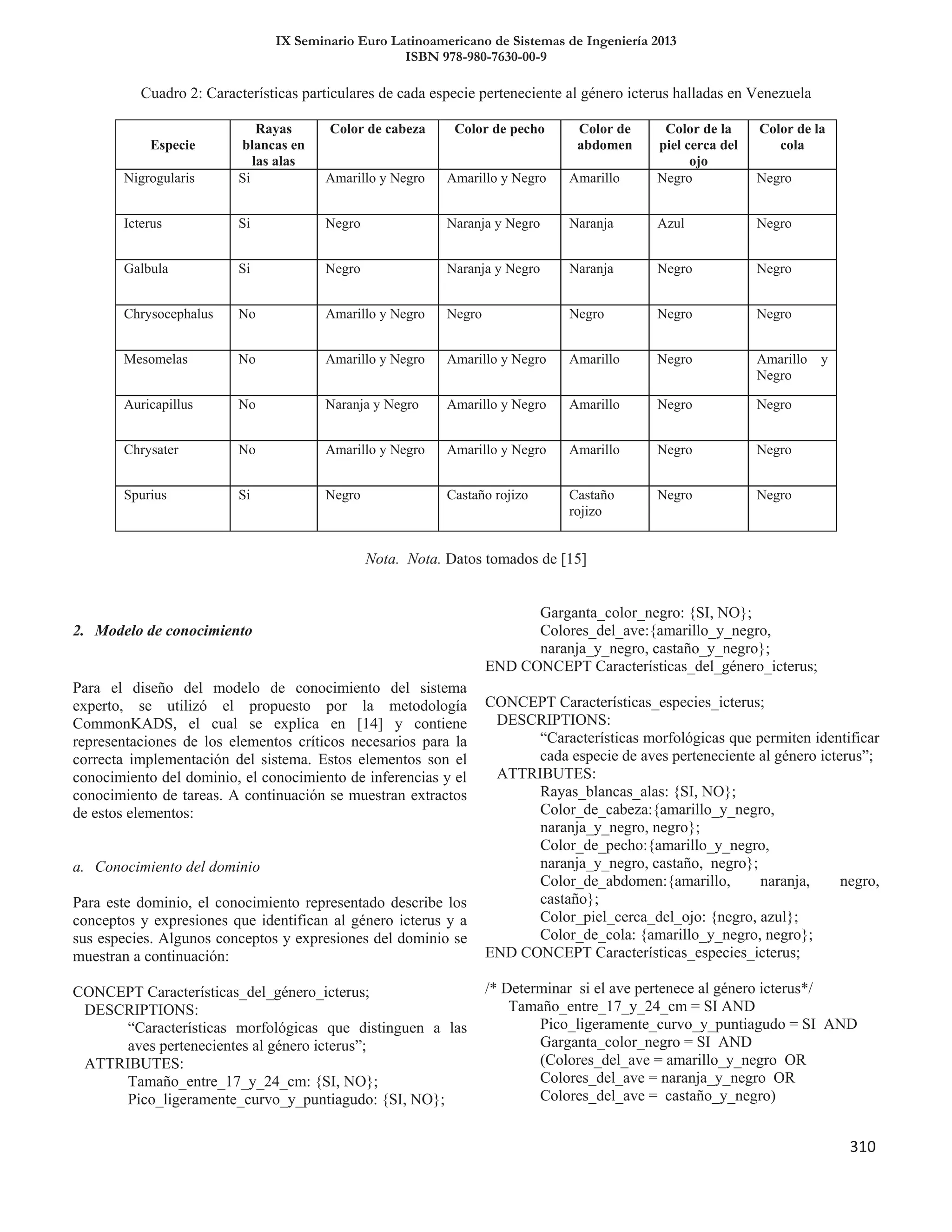

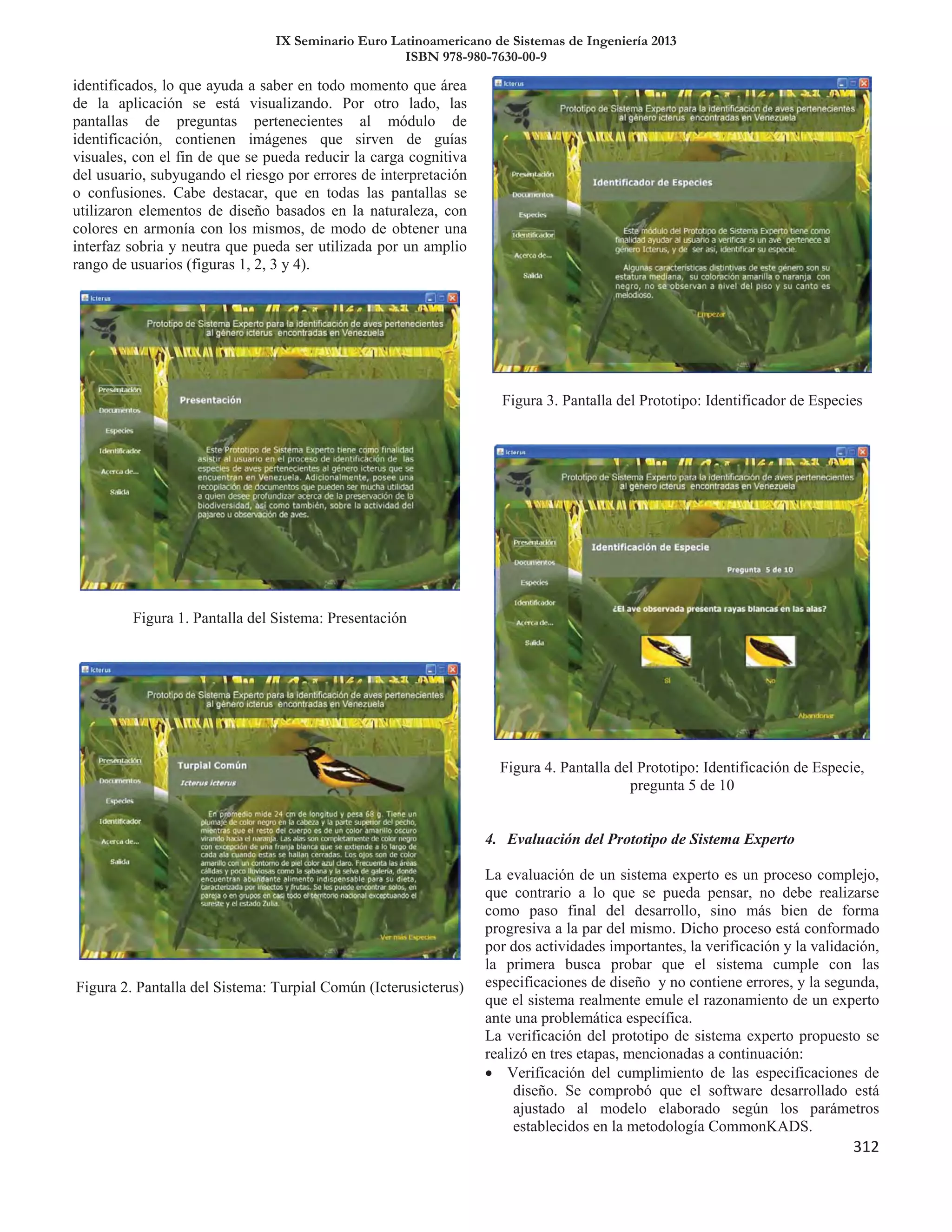
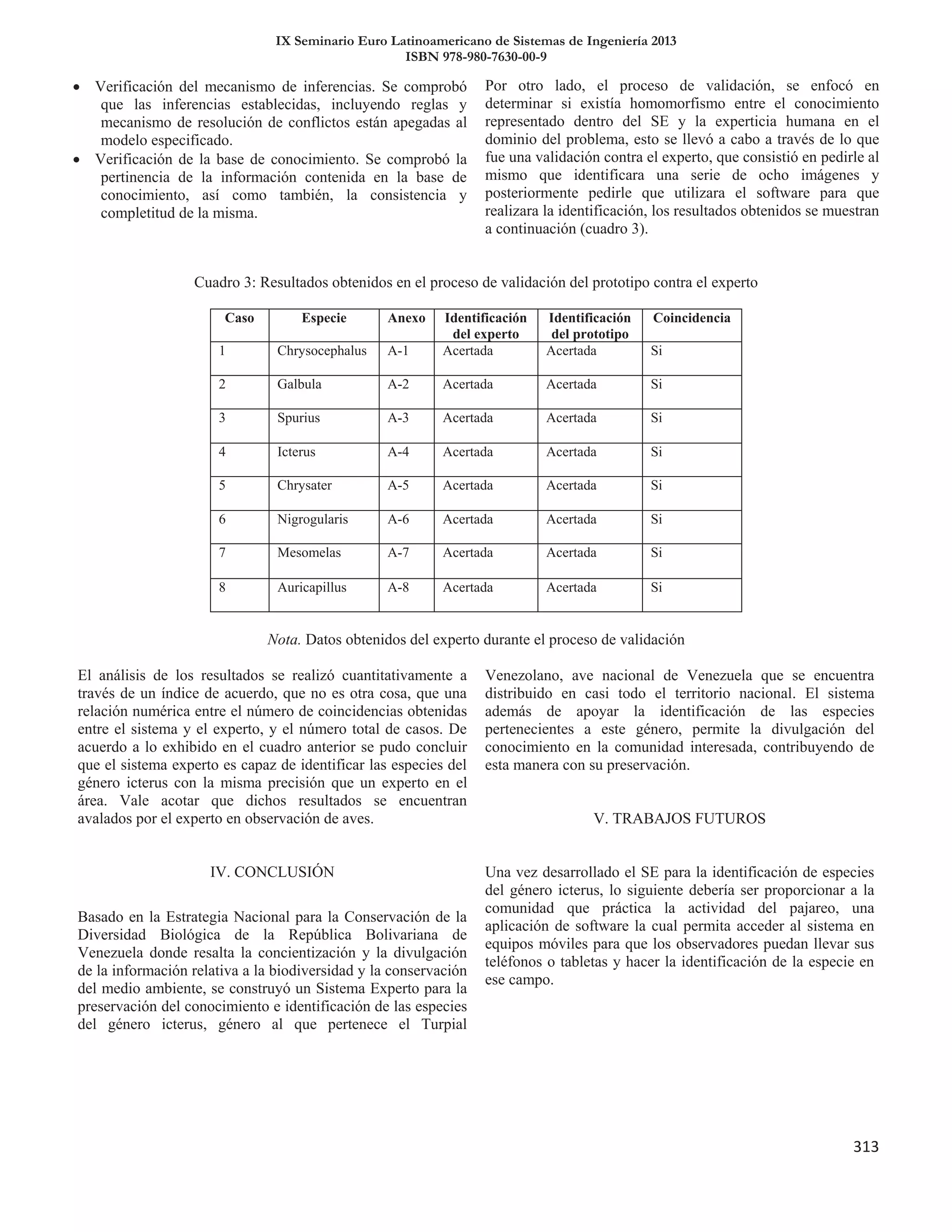














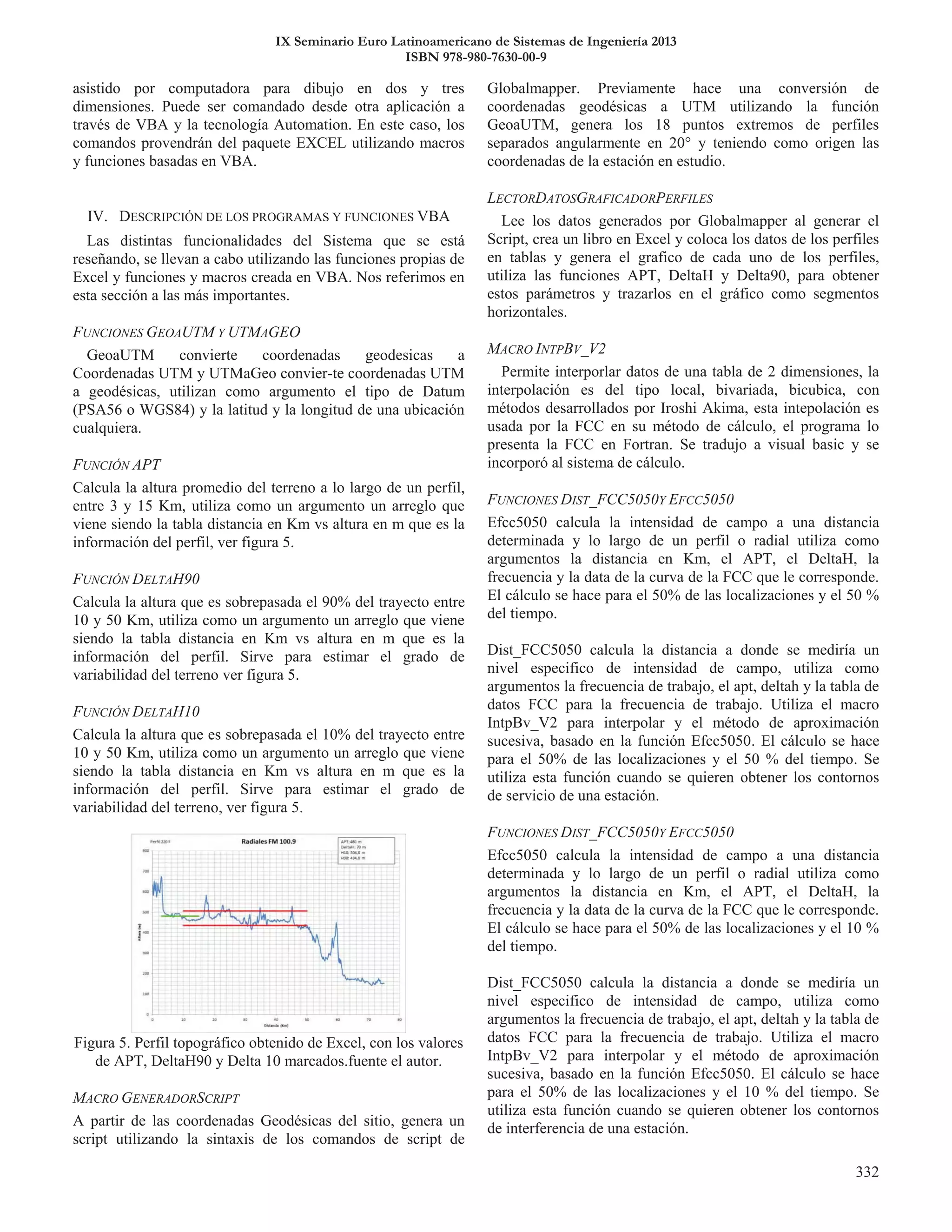
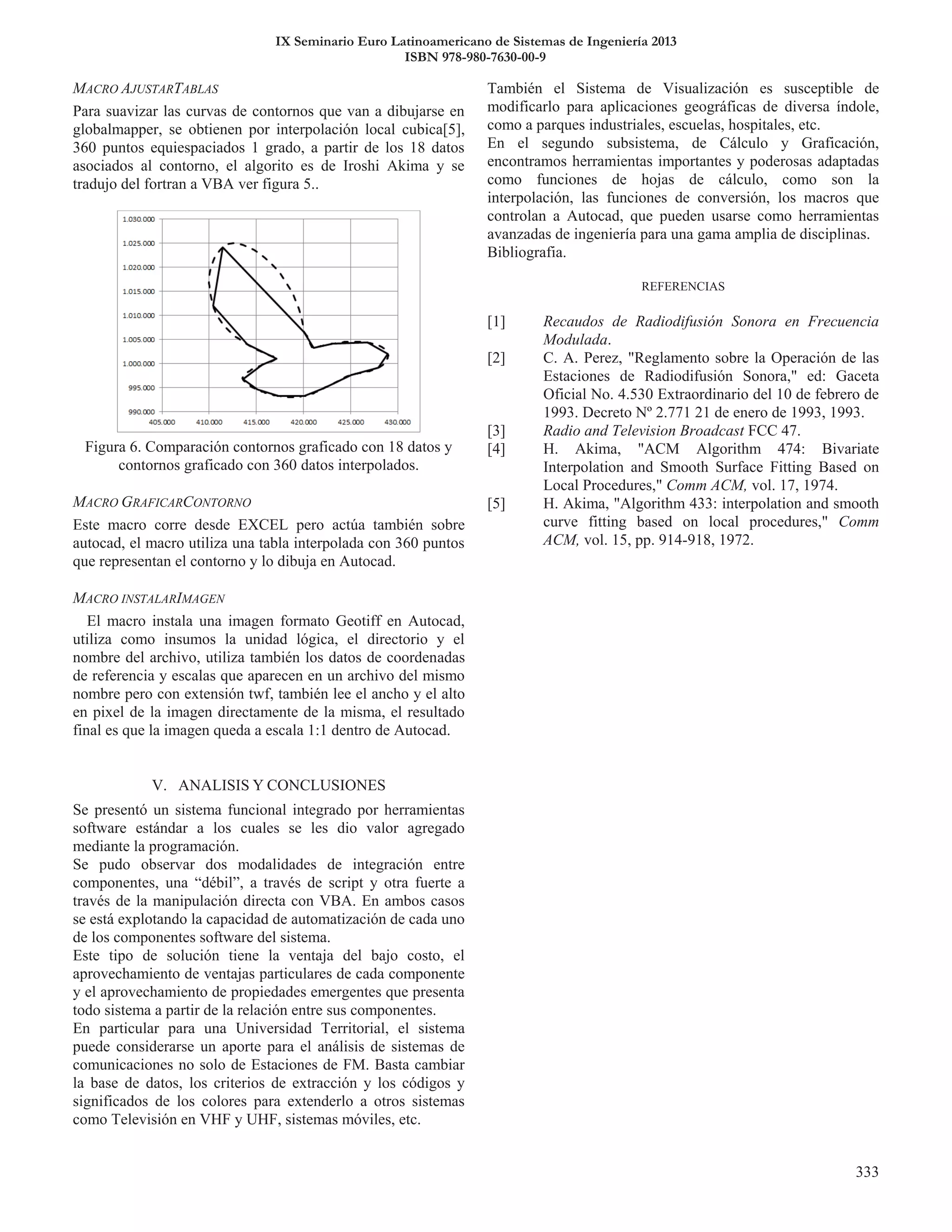
























![IX Seminario Euro Latinoamericano de Sistemas de Ingeniería 2013
ISBN: 978-980-7630-00-9
365
Para estar seguros del todo, fíjate en la columna de Vendedor.
Si no te es familiar tener un aparato de esa marca conectado,
has encontrado al intruso. En caso que reconozcas todos los
dispositivos conectados, puedes estar tranquilo.
I.CONCLUSIONES
Se han presentado 6 puntos básicos para asegurar la calidad,
privacidad y economía de nuestra red WIFi en nuestro hogar o
trabajo. El lector debe asegurarse el tener una política de
actualización de software tanto de su computador como de su
router. El Lector debe ser cuidadoso en que sitios navega y a
quién le comparte su correo electrónico y/o autoriza a ver sus
datos en las redes sociales.
REFERENCES
[1] Antonio Mañas Sandoval y Miguel Ángel Sacristán Lima
(2000). Redes Inalámbricas. Universidad del Valle.
Santiago de Cali, Colombia.
[2] Stallings, W. Wireless comunications and networks.
Prentice Hall. USA.
[3] Berkley Varitronics Systems Inc. Wireless Products
Catalog
[4] Cisco Systems Inc. WLAN Design
[5] Fuller, R.;Pfund,A.; Padjen, R.; Oullet, E.; Blankenship,
T. Building a Cisco Wireless LAN. Callisma
Sitios
[1] http://www.ssh.com
[2] http://www.cisco.com
[3] http://www.cisco.com/warp/public/779/smbiz/prodconfig/
help/eaglair/ap3xx/index.shm.htm
Dianalla Anais Stuch Dorta es Ingeniero en Informática por la Universidad
Politécnica Territorial del estado Aragua, Técnico Superior Universitario por
el Instituto Universitario Experimental de Tecnología de La Victoria, Cursante
de la especialización en Redes de Computadoras en el Postgrado en
Telemática de la Universidad Politécnica Territorial del estado Aragua.
Certificado en Servidores Linux por el Instituto Universitario Experimental de
Tecnología de La Victoria. Se desempeña como Analista de sistemas en el
Instituto Universitario de Tecnología y Administración, Sede Maracay.](https://image.slidesharecdn.com/memoria-ix-selasi-2013-lv-150303085824-conversion-gate01/75/Memoria-ix-selasi-2013-lv-382-2048.jpg)
![IX Seminario Euro Latinoamericano de Sistemas de Ingeniería 2013
ISBN 978-980-7630-00-9
366
CONTROL FUZZY Y CONTROL EN CASCADA DE LA VELOCIDAD DE UN MOTOR DE CD
FUZZY CONTROL AND CASCADE CONTROL THE SPEED OF A MOTOR CD
1Marielsi Coromoto Futrille Viera, 2Modesto Angulo Aguilera
1U.P.T.A. Federico Brito Figueroa, Av. Universidad y Av Ricaurte, Urb. Industrial Soco, La Victoria 2121,
Venezuela
2Universidad de Oriente, Sede Mella, Ave. Las Americas s/n, Santiago de Cuba 90400, Cuba
e-mail: futrille@gmail.com, anguloaguilera@gmail.com
RESUMEN. En este trabajo se modelan y simulan un Sistema Rectificador Controlado Motor de Corriente Directa con subordinación
y límite de corriente. En una primera parte se presenta una metodología para sintetizar los reguladores clásicos de corriente y
velocidad por métodos óptimos. Luego se sustituye el regulador de velocidad por un controlador por lógica fuzzy. En este último caso,
el regulador fuzzy, se muestra el procedimiento de diseño empleando la Toolbox Fuzzy Logic del Matlab. Finalmente se compara y
analiza la respuesta. La simulación se hizo empleando el Matlab y el Simulink como lenguaje de simulación. Los resultados de este
trabajo pueden emplearse para el diseño y análisis de reguladores de los sistemas de accionamientos eléctricos, y también para la
enseñanza de estas temáticas.
Palabras Claves. Lógica Fuzzy, Motor, Control en Cascada, Mando Subordinado, Modulo Óptimo, Optimo Simétrico.
ABSTRACT. With this Work has been model and simulate Controlled Rectifier System Direct Current Motor with subordination and
current limit. The first part presents a methodology to synthesize classic and current regulatory speed optimal methods. Then he
replaced the speed controller for a fuzzy logic controller. In the latter case, the fuzzy controller is shown the design process using the
Fuzzy Logic Toolbox of Matlab. Finally has been compared and analyzed the response. The simulation was done using the Matlab and
Simulink simulation language. The results of this work can be used for the design and analysis of regulators of electrical drive systems,
and also for the teaching of these subjects
Keywords: Fuzzy Logic, Motor, Cascade Control, Command Subordinated, Optimal Module, Symmetric Optimal
I. INTRODUCCIÓN
El desarrollo impetuoso de la industria y la técnica moderna es
debido fundamentalmente a la introducción en estas de los
denominados sistemas automatizados de dirección (SAD), los
cuales han posibilitado el incremento de la productividad del
trabajo, con una mejor y más amplia utilización de los
recursos materiales y humanos, dando lugar, a un acelerado
desarrollo de las fuerzas productivas.
Este trabajo presenta el diseño de un Sistema Automatizado de
Dirección del sistema Rectificador Controlado-Motor con
regulación de velocidad y subordinación y límite de corriente,
así como se muestra en la figura1 para luego ser comparado
con un control Fuzzy de velocidad.
Como es sabido, el sistema rectificador controlado-motor así
como se muestra en la figura1, ha sustituido en innumerables
aplicaciones al Ward Leonard debido a que es más eficiente,
más confiable, necesita menos mantenimiento, ocupa menos
espacio y tiene una mayor rapidez de respuesta. Este
accionamiento eléctrico tiene un excelente comportamiento,
tanto en estado estacionario como transitorio [1].
Figura 1 Esquema simplificado del sistema rectificador
controlado-motor de CD con regulación de velocidad y
subordinación de corriente.](https://image.slidesharecdn.com/memoria-ix-selasi-2013-lv-150303085824-conversion-gate01/75/Memoria-ix-selasi-2013-lv-383-2048.jpg)




![IX Seminario Euro Latinoamericano de Sistemas de Ingeniería 2013
ISBN 978-980-7630-00-9
371
REGULADOR FUZZY
Se diseñó un regulador fuzzy para la velocidad, del tipo
Mandani, de dos entradas, el error y la derivada del error de
velocidad, y una salida, el mando. Las funciones de
membresías escogidas fueron trapezoidales. Los conjuntos
difusos
NG Negativo Grande.
NM Negativo Mediano.
NP Negativo Pequeño.
0 Cero
PP Positivo Pequeño.
PM Positivo Mediano.
PG Positivo Grande
Funciones de membresía
Figura11 Implementación del regulador de velocidad Fuzzy
Figura 12. Control en lazo cerrado con regulador Fuzzy
Figura10 Funciones de Membresía utilizada
Y los Universos de Discurso
Entradas: Error [-300,300],
Derivada del Error [-300, 300]
Salida: Mando[-175,175]
Las reglas fueron obtenidas de la simulación anterior con
mando subordinado. Observándose la relación entre el error, u
razón de cambio (derivada) y el mando, garantizándose
además con estas reglas que la respuesta sea lo más rápida
posible y sin sobreimpulso [7]. Se generó para este caso un
total de 49 reglas.
En la simulación se sustituyó el regulador PI de velocidad, por
el regulador fuzzy obtenido, elaborado con la ayuda de la
Fuzzy LogicToolbox, Matlab. Finalmente se le agregaron
ganancias a las entradas y salida para un ajuste fino [4],
además de mantener la saturación para limitar la corriente a
valores permisibles en el motor, quedando finalmente el
regulador fuzzy como:
Figura 13.Velocidad del motor con Regulador Fuzzy](https://image.slidesharecdn.com/memoria-ix-selasi-2013-lv-150303085824-conversion-gate01/75/Memoria-ix-selasi-2013-lv-388-2048.jpg)




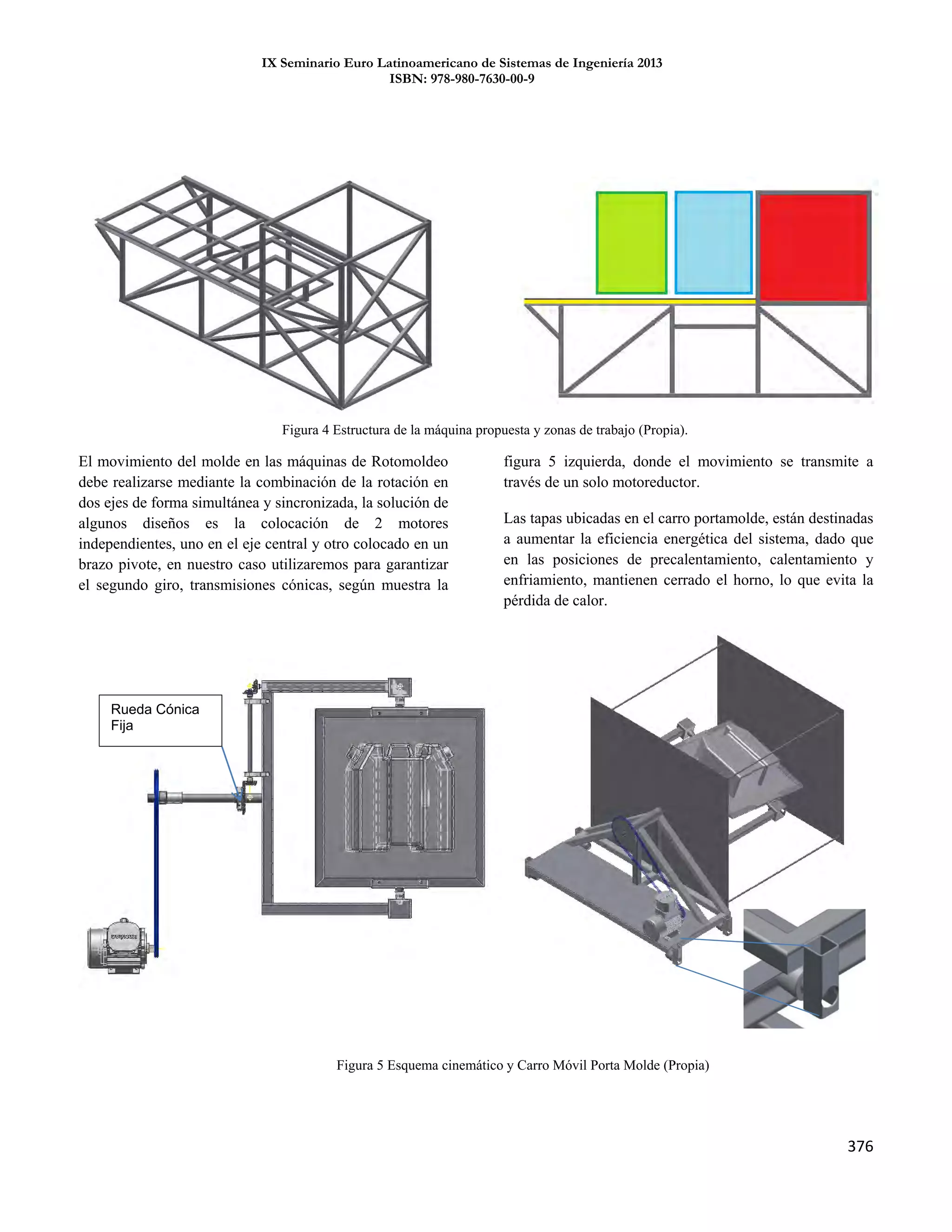
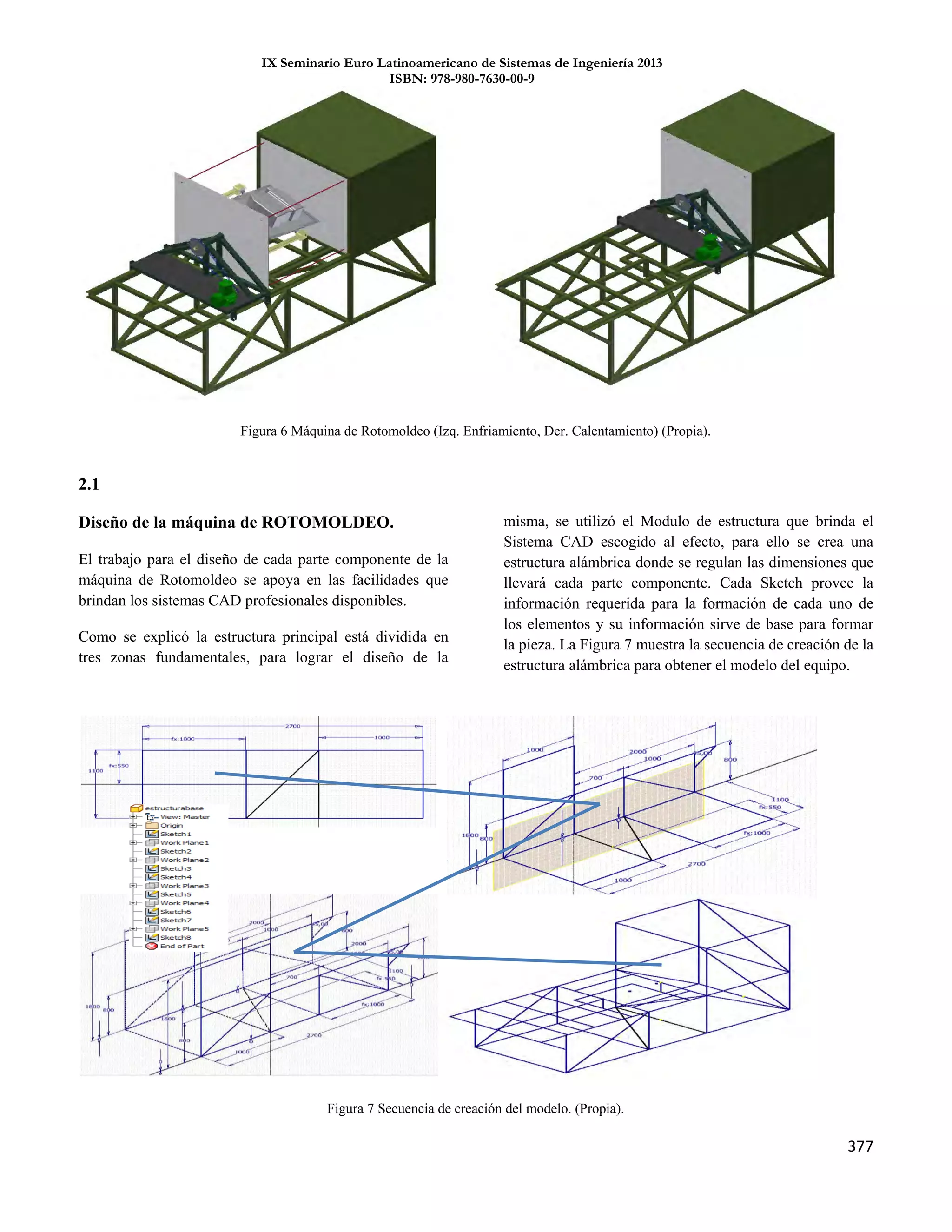
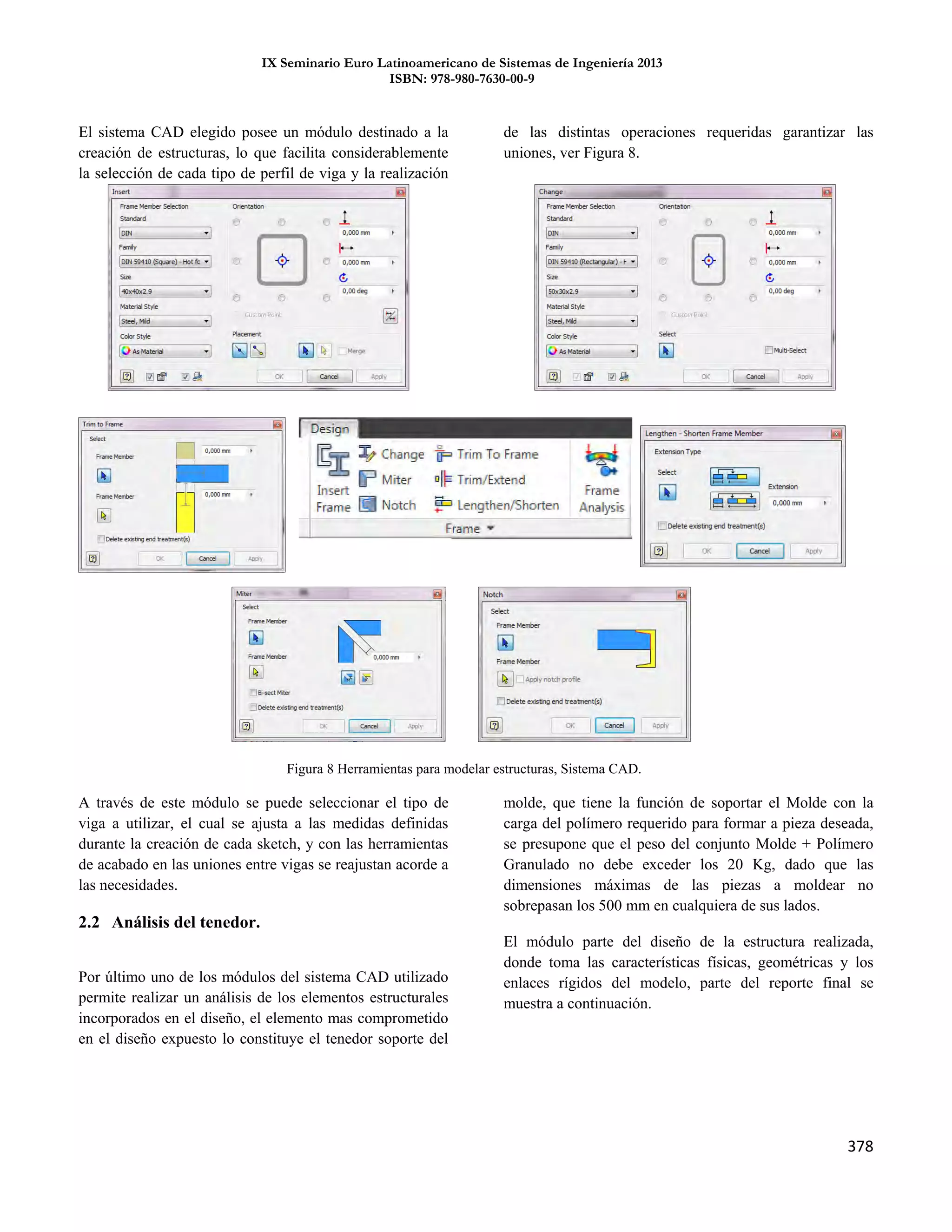




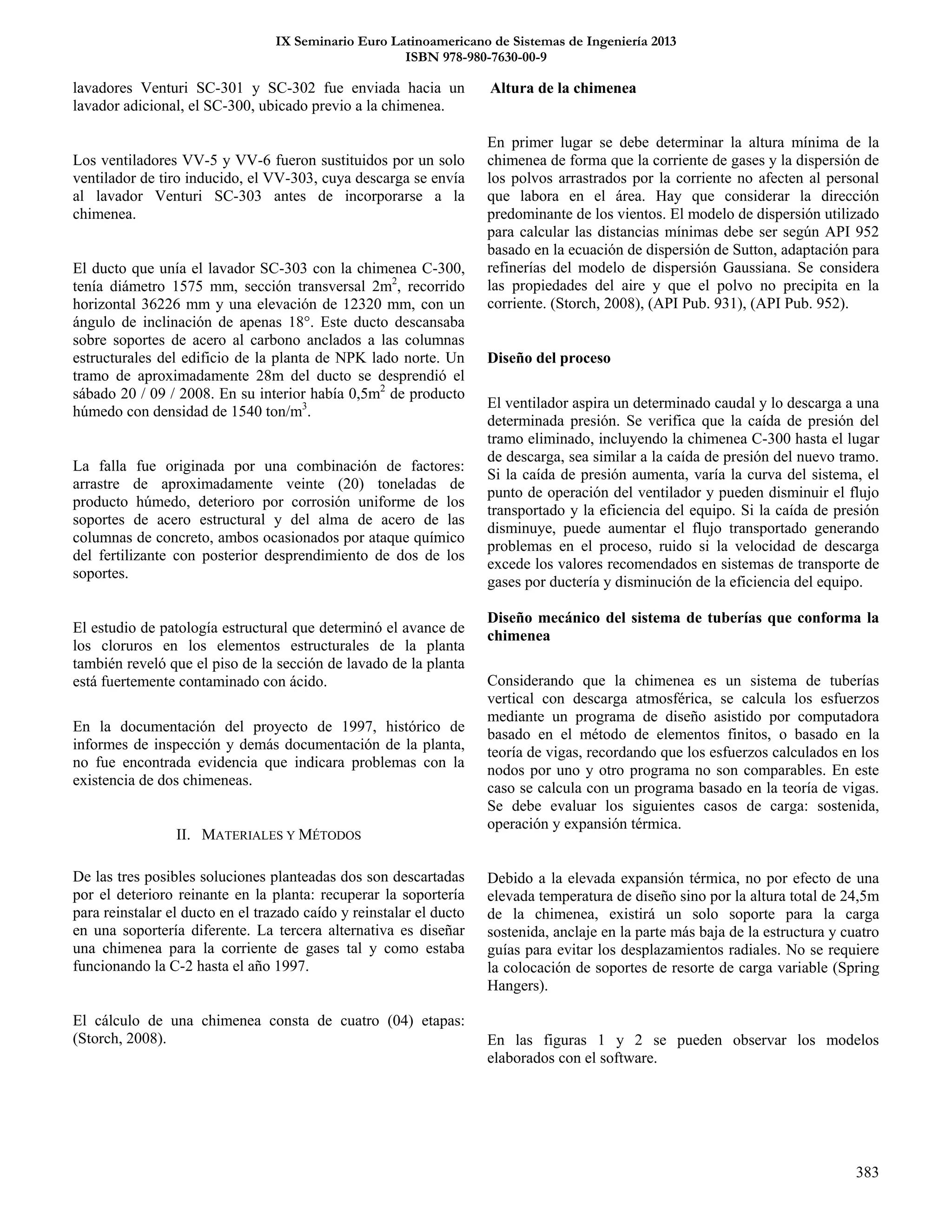
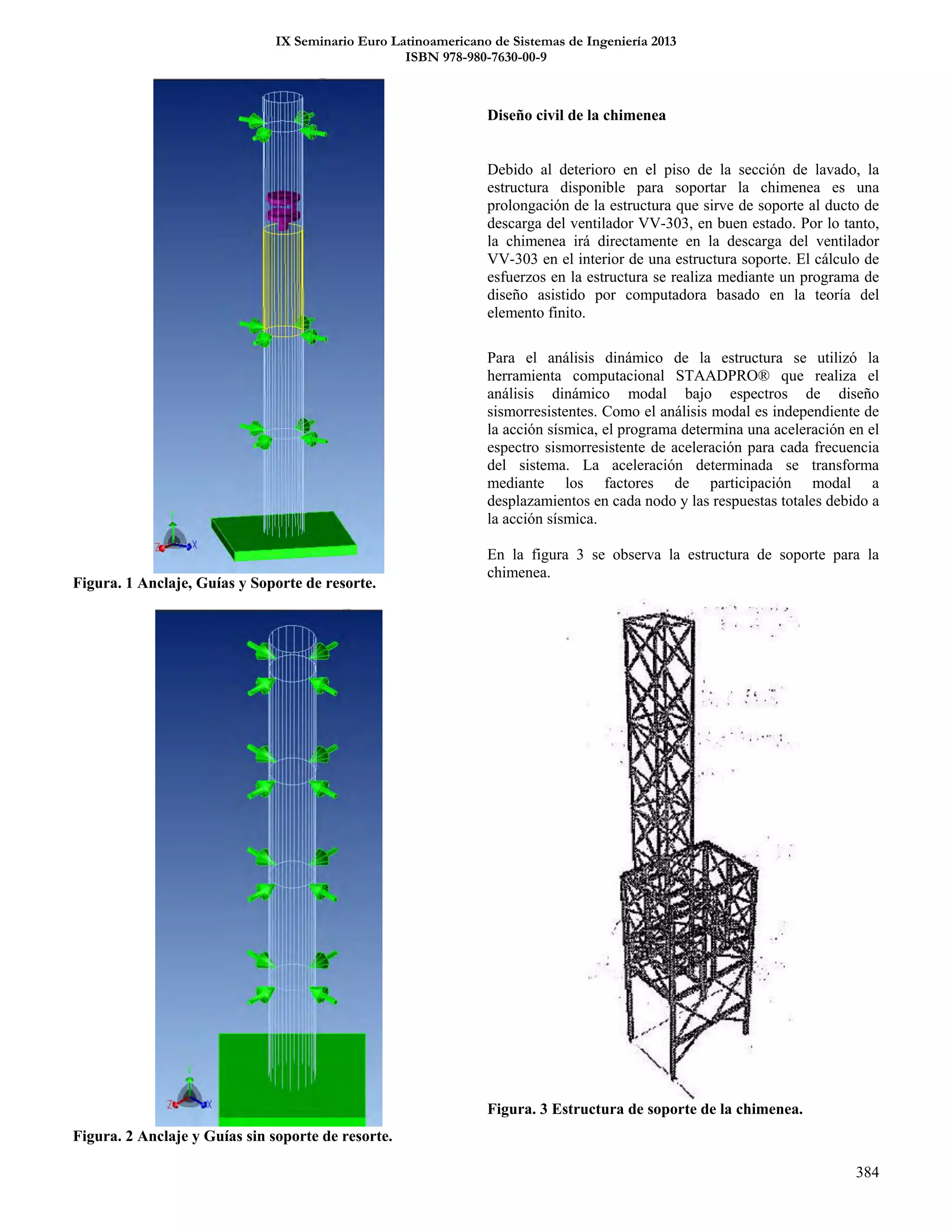
![IX Seminario Euro Latinoamericano de Sistemas de Ingeniería 2013
ISBN 978-980-7630-00-9
385
El procedimiento y los criterios de diseño están acorde con las
normas PDVSA de diseño de estructuras y con (AISC, 1993),
(COVENIN 1618, 1998), (COVENIN 1756-1, 2001).
Evaluación de los materiales posterior a la falla
El ducto original estaba fabricado en acero inoxidable
austenítico de bajo carbono ASTM A 240 Tp 316L, un diseño
de ingeniería con vida útil calculada de veinte (20) años y
estuvo solamente diez (10) años en operación. Se le hizo una
evaluación de los mecanismos de deterioro presentes,
corrosión producida por el fluido de trabajo y el medio e
impacto de la caída del ducto para determinar la vida útil
remanente y utilizar el material en la construcción de la
chimenea.
RESULTADOS Y DISCUSIÓN
La altura de 24,5 m es suficiente para evitar la dispersión del
polvo en el edificio de la planta de fertilizante NPK y en la
planta de producción de ácido fosfórico, instalaciones en la
trayectoria del viento según la distribución anual de vientos
registrada en el Complejo Petroquímico Morón.
La caída de presión en el ducto existente es de 1,8 pulg H20
(0,066 psi). La presión de descarga del ventilador VV-303 es
de 2 pulg H20 y la caída de presión prevista en la chimenea es
de 1,9 pulg H20, similar a la caída de presión en el trazado
caído. No se espera variación de condiciones de operación del
ventilador ni incremento de ruido.
Los esfuerzos calculados durante el análisis con la herramienta
computacional de los soportes originales en el trazado original
tomando en cuenta el peso añadido del producto en el ducto
caído superan los esfuerzos admisibles para los esfuerzos y
elementos estructurales del edificio de NPK.
El material del ducto original estaba en buen estado, sin
presencia de picaduras, corrosión uniforme o generalizada. No
fue evaluada corrosión bajo tensión por esfuerzos, mecanismo
de falla predominante para el acero inoxidable en ambiente de
cloruro. Utilizar este material eliminó los tiempos de procura y
redujo a solo un mes el tiempo de ejecución del proyecto.
En el diseño de la chimenea se tomaron en cuenta todos los
factores técnicos requeridos, sin embargo no se optimizó el
diseño en función del costo de material estructural o mano de
obra sino en función del menor tiempo de diseño y ejecución
posible, un mes para emitir la ingeniería de detalle y un mes
de ejecución.
CONCLUSIONES
La segunda chimenea diseñada para la planta de fertilizantes
fosfatados NPK es factible técnicamente cumpliendo con los
códigos en Ingeniería mecánica y civil aplicables al diseño de
estos componentes, sin impactar negativamente en el proceso,
el ambiente ni la seguridad industrial.
REFERENCIAS
[1]- AISC, LRFD Specification for Structural Steel Buildings,
En: Manual of Steel Construction. Load & Resistance Factor
Design, (LRFD), Part 6, USA, 1993.
[2]- API, Publicación N° 931, Chapter 6: Dispersion of gases,
En: Manual on Disposal of Refinery Wastes Volume on
Atmospheric Emissions, API, USA, 1974.
[3]- API, Publicación N° 952, Gaussian Dispersion Models
Applicable to Refinery Emissions, API, USA, 1977.
[4]- COVENIN, Nº 1618 Estructura de acero para
edificaciones. Método de los Estados Límites, COVENIN,
Venezuela, 1998.
[5]- COVENIN, Nº 1756-1 Edificaciones Sismorresistentes,
COVENIN, Venezuela, 2001.
[6]- COVENIN, Nº 2003 Acciones del viento sobre las
construcciones, COVENIN, Venezuela, 1989.
[7]- PDVSA, Nº 90615.1.013 Cargas Sísmicas en Recipientes
Verticales, Chimeneas y Torres. PDVSA, Caracas, 1999.
[8]- PDVSA, Nº JA-221 Diseño sismorresistente de
Instalaciones Industriales, PDVSA, Caracas, 1999.
[9]- PDVSA, Nº JA-222 Diseño sismorresistente de
Instalaciones Industriales, PDVSA, Caracas, 1999.
[10]- PDVSA, Nº JB-251 Diseño de estructuras de acero,
PDVSA, Caracas, 1999.
[11]- PDVSA, Nº A-261 Criterios y acciones mínimas para el
diseño de estructuras industriales, PDVSA, Caracas, 2001.
[12]- PDVSA, Nº JA-252 Diseño de fundaciones, PDVSA,
Caracas, 2002.](https://image.slidesharecdn.com/memoria-ix-selasi-2013-lv-150303085824-conversion-gate01/75/Memoria-ix-selasi-2013-lv-402-2048.jpg)
![IX Seminario Euro Latinoamericano de Sistemas de Ingeniería 2013
ISBN 978-980-7630-00-9
386
[13]- Storch de Gracia, J. M., & García Martín, T., Capítulo 2.
Química, Física e Ingeniería de los accidentes y de la
extinción, En: Seguridad Industrial en Plantas Químicas y
Energéticas. Fundamentos, evaluación de riesgos y diseño 2°
Ed. (Ediciones Díaz de Santos), Primera parte, ISE, Madrid,
España, pp. 76-79, 2008.](https://image.slidesharecdn.com/memoria-ix-selasi-2013-lv-150303085824-conversion-gate01/75/Memoria-ix-selasi-2013-lv-403-2048.jpg)

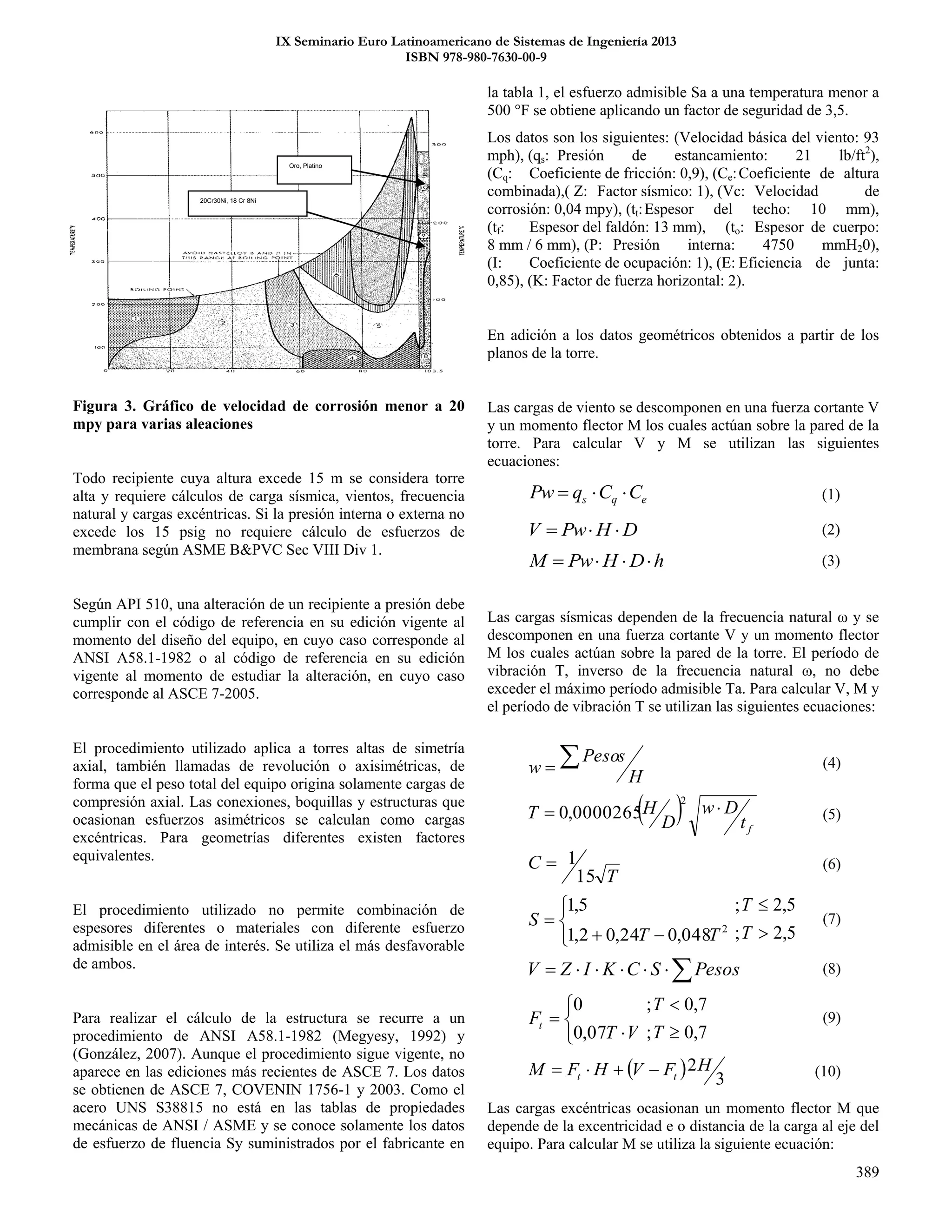

![IX Seminario Euro Latinoamericano de Sistemas de Ingeniería 2013
ISBN 978-980-7630-00-9
391
Conocidos estos resultados, se puede modelar el equipo en
elementos finitos para calcular la distribución estimada de
esfuerzos con combinaciones de espesores diferentes y
materiales con diferente esfuerzo de fluencia, partiendo de los
dos casos calculados como validación del modelo.
CONCLUSIONES
El acero inoxidable austenítico de alto silicio UNS S388815
puede ser utilizado en los anillos de la zona ácida de las torres
de absorción C-02 y C-03 de la planta de ácido sulfúrico 218
del Complejo Petroquímico Morón.
El espesor de lámina de 8 mm cumple con los códigos de
referencia aplicables.
El espesor de lámina de 6 mm no cumple con los códigos
aplicables, pero no se descarta teniendo en cuenta la
legislación Venezolana en edificaciones.
Los resultados obtenidos son un valor de referencia para
validar el modelado por elementos finitos de las torres.
REFERENCIAS
[1].- ANSI, Nº A58.1, Building Code Requirements for
Minimum Design Loads in Buildings and Other Structures,
ASCE / SEI, USA, 2006.
[2].- API, Nº 510 Pressure Vessel Inspection Code: In-Service
Inspection, Rating,
[3].- Repair, and Alteration, 9° Ed., ANSI / API, USA, 2006.
[4].- ASCE, N° 7, Minimum Design Loads for Buildings and
Other Structures, ANSI, USA, 1982.
[5].- COVENIN, Nº 1756-1 Edificaciones Sismorresistentes,
COVENIN, Venezuela, 2001.
[6].- COVENIN, Nº 2003, Acciones del viento sobre las
construcciones, COVENIN, Venezuela, 1989.
[7].- GONZÁLEZ, M., Diseño de torres altas, En: Apuntes de
Especialización de Ingeniería Mecánica en Plantas de
Procesos (USB) Tópico 3: Apuntes de MC7171 Equipos
Estáticos, USB, Caracas, Venezuela, pp. 79-80, 2007.
[8].- MEGYESY, E., Diseño de torres altas, En: Manual de
Recipientes a Presión. Diseño y Cálculo (Grupo Noriega
Editores), Parte 1: Diseño y manufactura de recipientes a
presión, traducción autorizada de MEGYESY, E., Pressure
Vessel Handbook 7° Ed, Limusa, Ciudad de México, pp. 50-
82, 1992.](https://image.slidesharecdn.com/memoria-ix-selasi-2013-lv-150303085824-conversion-gate01/75/Memoria-ix-selasi-2013-lv-408-2048.jpg)
![IX Seminario Euro Latinoamericano de Sistemas de Ingeniería 2013
ISBN 978-980-7630-00-9
393
y las demás arpas. Según API RP 573, en reformadores de
hidrógeno el equipo no puede operar fuera de las condiciones
de diseño por los elevados esfuerzos y desplazamientos
térmicos.
La mezcla fluye desde el distribuidor de entrada hacia los
tubos catalíticos a través de unos lazos de expansión
denominados pigtails. Cada tubo posee un lazo de expansión.
A la salida, existen dos colectores principales cuya descarga
hacia el reformador secundario A-702 se produce a través de
un sistema de tuberías denominado línea de transferencia.
Se establece como objetivo determinar las modificaciones
requeridas para colocar el reformador primario A-701 en
servicio tras las fallas de ciertos componentes estructurales,
soportería e internos afectados, cumpliendo con la práctica
recomendada API 573.
II. MATERIALES Y MÉTODOS
La solución a este problema se enfocó en varias etapas.
Análisis estático de cargas en soportes de tubos catalíticos.
Este análisis está orientado a conocer cuál es la causa de la
deformación de los perfiles estructurales que sirven de base a
los soportes de resorte de carga variable o spring hanger que
sirven de soporte a los tubos catalíticos en el área afectada por
el calor, observada entre las arpas 10 y 13.
Acorde al plano de construcción, el material es un acero JIS
SS-A, equivalente a un acero al carbono ASTM A 36.
La metodología empleada es la realización del cálculo
estructural de la viga soporte del soporte de resorte bajo su
estado normal de carga para 38 °C (100 °F, temperatura
ambiente) y 260 °C (500 °F, temperatura normal en el área
durante la operación). Una vez hallados estos esfuerzos se
determina la variación de esfuerzo del acero al carbono
estructural con una temperatura hasta 537 °C (1000 °F) con la
finalidad de determinar a partir de cual temperatura se excede
la fluencia y comienza la deformación plástica de la viga antes
de iniciar un tratamiento térmico de recocido a partir de 550
°C. a 900 °C (1650 °F) la resistencia a la fluencia del acero
estructural es prácticamente cero.
Figura 1. Estado de Cargas utilizado en el cálculo de la viga.
Tabla 1. Esfuerzos máximos calculados en vigas.
38 °C (100 °F) 260 °C (500 °F)
ESFUERZO
MÁXIMO (ksi)
15,47 11,5
Tabla 2. Propiedades del ASTM A 36 a diferentes temperaturas.
TEMP. (°F) yS (ksi) E (ksi)
100 36 29.4 0.001224
200 33 28.8 0.001146
300 31.8 28.8 0.001104
400 30.8 27.9 0.001104
500 29.3 27.3 0.001073
600 27.6 26.5 0.001042
700 25.8 25.5 0.001012
800 24.1 24.2 0.000996
900 22.8 22.5 0.001013
1000 21.4 20.4 0.001049
Los resultados de las tablas 1 y 2 se grafican en la figura 2.
VARIACIÓN DE LA RESISTENCIA CON INCREMENTO DE
TEMPERATURA
0
5
10
15
20
25
30
35
40
0 200 400 600 800 1000 1200
TEMPERATURA [°F]
ESFUERZO[KSI]
ESFUERZO CALCULADO
EN CALIENTE
ESFUERZO CALCULADO
EN FRIO
RESISTENCIA A LA
FLUENCIA
Figura 2. Esfuerzos máximos y admisibles.
En la figura 1 se observa que a una temperatura de 537 °C
los esfuerzos máximos son menores a la resistencia admisible.
El incremento de la temperatura ambiente por efecto de la
llama no varía los esfuerzos máximos sino disminuye la
resistencia de fluencia. La deformación plástica encontrada en
sitio es indicativo que la temperatura excedió los 537 °C.
Razón por la cual se requiere metalografía en sitio para
descartar un recocido del acero estructural.
En adición a la deformación plástica por disminución de la
resistencia de fluencia, mantener la temperatura elevada por
un período prolongado activa dos mecanismos de falla:
termofluencia y oxidación. En la tabla 3 está la temperatura
umbral de falla por termofluencia y en la tabla 4 la rata de
corrosión por oxidación.](https://image.slidesharecdn.com/memoria-ix-selasi-2013-lv-150303085824-conversion-gate01/75/Memoria-ix-selasi-2013-lv-410-2048.jpg)

![IX Seminario Euro Latinoamericano de Sistemas de Ingeniería 2013
ISBN 978-980-7630-00-9
395
Tabla 4. Opciones para sustituir el perfil C180X75X7.
PERFIL
PESO
(kg/m)
%
Variación
Ix
(cm4
)
%
Variación
Iy
(cm4
)
%
Variación
IPN 180 21,9 2,82% 1450 0,00 81,3 -48,87
UPN200 25,30 18,78% 1910 31,72 148 -6,92
IPN 180 21,90 2,82% 1450 0,00 81,3 -48,87
UPN180M6 29,44 38,22% 1583 9,17 198 24,53
UPN180M5 28,20 32,40% 1551 6,97 191 20,13
UPN180M4 26,96 26,58% 1518 4,69 182 14,47
W8X18 26,7 25,35% 2580 2,38 332 108,81
W6X16 24,1 13,15% 1350 -6,90 184 15,72
W8X15 22,7 6,57% 2020 39,31 142 -10,69
W6X20 29,9 40,38% 1730 19,31 553 247,80
IPE220 26,2 23,00% 2770 91,03 205 28,93
UPN220 29,4 38,03% 2690 85,52 196 23,27
Tabla 5. Opciones para sustituir el perfil C150X75X9.
PERFIL
PESO
(kg/m)
%
Variación
Ix (cm4
)
%
Variación
Iy
(cm4
)
%
Variación
UPN 160 18,90 -21,12% 925 -11,90 85 -42,18
UPN 160M4 23,26 -2,90% 1036 -1,31 132 -10,20
UPN 160M5 24,36 1,65% 1059 0,82 138 -6,12
UPN 180 22,00 -28,92% 1350 28,57 114 -22,45
W6X16 24,1 0,58% 1350 28,57 184 25,17
IPN 160 17,9 24,51% 935 -10,95 54,7 -62,79
Tabla 6. Opciones para sustituir el perfil C150X75X6,5.
PERFIL
PESO
(kg/m)
%
Variación
Ix
(cm4
)
%
Variación
Iy
(cm4
)
%
Variación
UPN 160 18,90 1,78% 925 8,82 85 -36,09
UPN 160M4 23,26 25,28% 1036 21,91 132 -0,75
UPN 160M5 24,36 31,16% 1059 24,54 138 3,76
W6X15 22,4 20,62% 1210 42,35 388 191,73
IPN 160 17,9 -3,61% 935 10,00 54,7 -58,87
Tabla 7. Opciones para sustituir el perfil H200X100X5,5X8.
PERFIL
PESO
(kg/m)
%
Variación
Ix (cm4
)
%
Variación
Iy
(cm4
)
%
Variación
HEA200 42,3 39,74% 3690 46,43 1340 258,29
HEA180 35,5 17,28% 2510 -0,40 925 147,33
IPN200 26,20 25,36% 2140 20,90 117 -13,33
Análisis de soportes de resorte
La metodología empleada en este caso es la evaluación de
propuestas o alternativas de sustitución de los soportes de
resorte de carga variable dañados o comprometidos
mecánicamente durante el incidente. Los parámetros de
comparación son el desplazamiento, carga en frío y carga en
caliente listados en las tablas 8 y 9. Cada tubo catalítico posee
su propio soporte.
Tabla 8. Soportes de tubos catalíticos
Carga en frío [Kgf] 650
Carga en caliente [Kgf] 477
Desplazamiento [mm] 173
Tabla 9. Soportes del distribuidor de entrada
Carga en frío [Kgf] 1175
Carga en caliente [Kgf] 835
Desplazamiento [mm] 173
En el mercado nacional, se evalúa los soportes de resorte del
reformador primario de un tren de producción de amoniaco
Urea ubicado en el Complejo Petroquímico Ana María
Campos CPAMC, actualmente fuera de servicio. El
desplazamiento, carga en frío y carga en caliente son similares
a lo requerido y se listan en la tabla 10. Posteriormente, se
valida estos cálculos mediante un análisis de esfuerzos de los
tubos catalíticos en un programa computacional utilizando un
modelado por elementos finitos (Ayestarán, 2012).
Tabla 10. Soportes de resorte ubicados en CPAMC.
Carga en frío [Kgf] 450
Carga en caliente [Kgf] 344
Desplazamiento [mm] 212
Debido a que los soportes de resorte no tienen la misma
configuración y que cada soporte proveniente del CPAMC
pueden soportar dos tubos catalíticos, se diseña un nuevo
arreglo de instalación para los soportes de resorte
seleccionados.
Se diseña un banco de pruebas para calibrar los soportes
seleccionados. La carga en caliente se obtiene a partir de la
constante de rigidez real de cada soporte de resorte y el
desplazamiento de 173 mm de los soportes originales. El
modelado por elementos finitos requiere conocer los valores
reales de carga en frío, carga en caliente y desplazamiento de
cada soporte de resorte utilizado. (Ayestarán, 2012).
No se debe operar el reformador primario sin soportación
adecuada de los tubos catalícos debido a que los tubos pueden
fallar por fatiga térmica en las zonas en las cuales la
combinación de esfuerzos de membrana y expansión térmica a
elevadas temperaturas exceda el umbral de resistencia
admisible del material. Sin un sistema de soportes adecuado,
los tubos se pueden inclinar o doblar en servicio adicionando
momentos flectores en los respectivos pigtails y distribuidor
de entrada (API 573, 2003). Estas fallas liberan al ambiente](https://image.slidesharecdn.com/memoria-ix-selasi-2013-lv-150303085824-conversion-gate01/75/Memoria-ix-selasi-2013-lv-412-2048.jpg)
![IX Seminario Euro Latinoamericano de Sistemas de Ingeniería 2013
ISBN 978-980-7630-00-9
396
una mezcla de vapor de agua, gas natural e hidrógeno a una
temperatura superior a la de autoignición, lo cual provocará
otro evento como el sucedido.
Aunque el reformador primario está fabricado a partir de
tubos, accesorios de tubería y soportes de tubería no es un
sistema de tubería y no debe ser tratado como tal. Es un
recipiente a presión sometido a fuego directo. En la
información de diseño no especifica el código de referencia.
Para la reparación, debe aplicarse el código API 510 el cual
permite aplicar como código de referencia el código de
recipientes a presión ASME Sec VIII Div 1.
El análisis de esfuerzos debe realizarse entre dos anclajes.
Como el reformador primario carece de anclajes, el análisis se
realiza desde el precalentador de mezcla gas vapor
identificado como H-704 hasta el reformador secundario A-
702, incluyendo las tuberías asociadas.
Análisis de materiales
Todo componente a presión que requiera ser reemplazado,
incluyendo empaquetaduras, debe ser reemplazado por un
material cuya resistencia a los mecanismos de deterioro
existentes y resistencia admisible a la temperatura de trabajo
sean mayores o iguales a la resistencia de los componentes en
funcionamiento y a las resistencias de los materiales originales
del equipo.
Los materiales que requieren ser reemplazados son algunos
pigtails, las empaquetaduras y componentes de los colectores
de salida. Adicional a la selección de materiales adecuados, se
debe verificar que el espesor de los lazos de expansión o
pigtails sea mayor al espesor de presión.
III. RESULTADOS Y DISCUSIONES
El equipo está diseñado de manera que en condiciones
normales de parada y operación su estructura permite el
óptimo soporte de todos sus elementos internos con un factor
de seguridad no menor de dos.
La presencia de altas temperaturas durante cierto período de
tiempo en el área interna de la parte superior del reformador
primario A-701 disminuyó la resistencia de fluencia de los
perfiles estructurales internos que resisten las cargas y
momentos propios de la soportación de las arpas, lo cual
originó su deformación plástica y desplazamiento tanto en
sentido horizontal dirección sur – norte como en sentido
vertical descendente. Las altas temperaturas exceden el umbral
de falla por termofluencia y de oxidación.
La altura del techo del reformador disminuyó en la zona
afectada por el calor. Antes de colocar los nuevos perfiles
estructurales debe efectuarse un levantamiento dimensional de
la estructura para llevarla a sus condiciones originales debido
a que en condición deformada las nuevas secciones
estructurales podrían no coincidir con lo existente.
Todos los perfiles con deformación plástica, que hayan
sufrido daños, cambios en su microestructura o disminución
de sus propiedades mecánicas deben ser sustituidos y deben
ser apuntalados previo a su sustitución para prevenir una
redistribución de cargas estructurales en el equipo.
Los perfiles estructurales seleccionados para sustituir los
perfiles originales se listan en la tabla 11.
Tabla 11. Perfiles a utilizar en el reformador primario.
PERFIL PROPUESTA 1 PROPUESTA 2
C200X90X8 HEA180 UPN 220
C180X75X7 IPE 220 IPE 220
C150X75X9 UPN 180 UPN 180
C150X75X6,5 UPN 160 UPN 160
H200X100X5,5X8 IPN 200 IPN 200
Las opciones seleccionadas para sustituir los perfiles
estructurales originales incrementan el peso de la estructura.
Para compensar este incremento, en una parada mayor previa
se cambió el refractario del techo del horno del reformador
desde primario denso por módulos de fibra cerámica, lo cual
implicó una reducción de peso superior a cincuenta (50)
toneladas, un orden de magnitud superior al peso adicionado
en elementos estructurales.
Los soportes de resorte provenientes del CPAMC se pueden
instalar en el reformador primario A-701 de la Instalación
180A. Se listan en la tabla 12. Su instalación requiere un
arreglo distinto al existente. Para instalar el arreglo no se debe
modificar las vigas que conforman la estructura del
reformador primario, sea de forma temporal o permanente.
Todo soporte de resorte debe ser calibrado en el banco de
pruebas, incluyendo los soportes en operación no
reemplazados.
Tabla 12. Soportes a utilizar en el reformador primario.
Carga en frío [Kgf] 450
Carga en caliente [Kgf] 344
Desplazamiento [mm] 212
No se debe operar el reformador primario sin soportación
adecuada de los tubos catalícos.
El reformador primario es un recipiente a presión a fuego
directo y debe ser inspeccionado y reparado acorde con los
códigos de recipientes a presión, aunque el banco de tubos
catalíticos haya sido fabricado con elementos de tubería.](https://image.slidesharecdn.com/memoria-ix-selasi-2013-lv-150303085824-conversion-gate01/75/Memoria-ix-selasi-2013-lv-413-2048.jpg)
![IX Seminario Euro Latinoamericano de Sistemas de Ingeniería 2013
ISBN 978-980-7630-00-9
397
El arreglo de instalación de soportes de resorte debe respetar
los resultados del cálculo de esfuerzos por elementos finitos
realizado.
El análisis de esfuerzos debe realizarse entre dos anclajes.
Como el reformador primario carece de anclajes, el análisis se
realiza desde el precalentador de mezcla gas vapor
identificado como H-704 hasta el reformador secundario A-
702, incluyendo las tuberías asociadas.
Todo componente a presión que requiera ser reemplazado,
incluyendo empaquetaduras, debe ser reemplazado por un
material cuya resistencia a los mecanismos de deterioro
existentes y resistencia admisible a la temperatura de trabajo
sean mayores o iguales a la resistencia de los componentes en
funcionamiento y a las resistencias de los materiales originales
del equipo.
El reformador primario debe ser modelado como un
conjunto integrado para verificar que el arreglo seleccionado
cumple con los códigos aplicables. El cálculo de esfuerzos en
el conjunto integrado determinó que el arreglo es aplicable
IV. CONCLUSIONES
Existen alternativas estructurales, de soportería y de
materiales para colocar el reformador primario A-701 en
servicio.
REFERENCIAS
[1]- Ayestarán, A., & Vega, C., Análisis Estructural por
Elementos Finitos del Reformador Primario A-701, ubicado
en la Planta de Amoniaco de Pequiven – Complejo Morón. 1°
Jornadas Tecnológicas. Morón, Venezuela, Junio 2012.
[2]- API, Deterioro de reformadores, En: Nº 573
Recommended Practice. Inspection of Fired Boilers and
Heaters, Chapter 6: Deterioration mechanisms, 2° Ed., ANSI
/ API, USA, 2003.
[3]- API, Nº 510 Pressure Vessel Inspection Code: In-Service
Inspection, Rating, Repair, and Alteration, 9° Ed., ANSI /
API, USA, 2006.
[4]- ASME, ASME Boiler and Pressure Vessel Code B&PVC.
Section VIII Division 1 Rules for Construction of Pressure
Vessels, ASME, New York, USA, 2007.
[5]- Budynas, & Nysbett, Shigley’s Mechanical Engineering
Design, 8° Ed, McGraw Hill, USA, 2006.](https://image.slidesharecdn.com/memoria-ix-selasi-2013-lv-150303085824-conversion-gate01/75/Memoria-ix-selasi-2013-lv-414-2048.jpg)

![IX Seminario Euro Latinoamericano de Sistemas de Ingeniería 2013
ISBN 978-980-7630-00-9
398
INTRODUCCIÓN
La conservación del medio ambiente, a efecto de que el
hombre pueda habitar en un mundo que le ofrezca las mejores
condiciones de vida posibles y evitar la destrucción de nuestro
planeta.
El sol es considerado una de las fuentes de energía más
prometedoras, pues se considera una fuente inagotable, debido
a esto las tecnologías de aprovechamiento de energía solar han
tenido un gran auge en el mercado, donde la tecnología que
mayor ha impactado es la fotovoltaica, la cual convierte
directamente la energía solar en electricidad [1].
El principio físico que rige el funcionamiento de una célula
fotovoltaica, puede ser explicado tomando como base una
unión p-n de material semiconductor (normalmente silicio)
sensible a la luz solar. Cuando ésta incide sobre la unión
(generalmente sobre el lado n), los fotones que la constituyen
suministran la cantidad de energía necesaria a los electrones
de valencia del semiconductor, para romper el enlace que los
mantenía unidos a sus átomos respectivos.
Las celdas fotovoltaicas tienen curvas características V-I
que definen el comportamiento de las mismas ante diferentes
condiciones de operación. La potencia de una celda solar está
dada por el producto de la corriente y el voltaje de la misma.
El punto de máxima potencia (MPPT, Maximum Power
Point Tracking) es el producto del voltaje en el punto máximo
(VMPPT) y corriente en el punto máximo (IMPPT) para los cuales
la potencia extraída del arreglo fotovoltaico es máxima
(PMPPT). El punto de máxima potencia varía continuamente,
pues depende de factores como la temperatura de la celda
solar y de las condiciones de irradiancia [2].
Los algoritmos de seguimiento del punto de máxima
potencia (MPPT) se utilizan en sistemas fotovoltaicos para
maximizar la energía entregada por los mismos, dicho
seguimiento se realiza básicamente variando el valor de ciclo
útil de un convertidor de potencia. Existen gran variedad de
algoritmos de seguimiento de punto de máxima potencia como
por ejemplo [3]: perturba y observa, basados en lógica difusa,
basado en redes neuronales artificiales, RCC (Ripple
Correlation Control) [4], conductancia incremental (INC)
[5, 6, 7] entre otros.
En los sistemas fotovoltaicos existe la posibilidad de
implementar un dispositivo adicional con el fin de aumentar la
captación de radiación solar y por ende la energía suministrada
por la instalación, tal dispositivo es un seguidor solar.
Un seguidor solar fig. 1, es un equipo conformado por una
parte fija y una móvil, que consta de 2 grados de libertad, cuya
finalidad es la de proporcionar una mayor captación de la
radiación solar, permitiendo que los paneles se encuentren de
manera perpendicular con los rayos de sol durante el día y
dentro del rango de movimiento.
Figura 1: Diseño de Seguidor Solar
I. DESARROLLO
A. Modelo panel solar
El circuito equivalente de una celda PV, tiene su
configuración física y sus características eléctricas fig. 2.
Figura 2.- Esquemático de la celda PV [Townsend, 1989]
La juntura entre la capa N (red de carga negativa) y P (red
de carga positiva) crea el efecto de un diodo. Cuando la celda
PV recibe la irradiación solar se obtiene una fuente de
corriente constante y las pérdidas eléctricas internas son
representadas por una resistencia fig. 3.
Figura 3.- Circuito Eléctrico equivalente de la celda PV
[Eckstein, 1990]
La fuente de corriente IL representa la corriente eléctrica
generada debida a la radiación luminosa incidente sobre la
superficie activa de la celda (efecto fotovoltaico), la corriente
es unidireccional y es función de la radiación incidente,
temperatura y voltaje. La juntura P-N es representada por el](https://image.slidesharecdn.com/memoria-ix-selasi-2013-lv-150303085824-conversion-gate01/75/Memoria-ix-selasi-2013-lv-416-2048.jpg)
![IX Seminario Euro Latinoamericano de Sistemas de Ingeniería 2013
ISBN 978-980-7630-00-9
399
diodo en paralelo con la fuente de corriente, que es atravesado
por una corriente interna unidireccional ID que depende de la
tensión en las terminales de la celda y la temperatura, la
resistencia en serie Rs representa las pérdidas eléctricas interna
en la celda [8].
Una única célula, es capaz de proporcionar una tensión de
apenas 0,5V y una potencia entre 1 y 2W. Para elevar la
potencia suministrada, las células se conectan en serie y en
paralelo, dando lugar a lo que se denomina panel o módulo
fotovoltaico.
La siguiente expresión (1) describe la relación que existe
entre la tensión (V) y la corriente (I) entregada por el módulo
[9], donde np y ns son las células conectadas en paralelo y en
serie; RP y RS las resistencias intrínsecas paralelo y serie
asociadas a la célula, K es la constante de Boltzman (1.38 *
10-23
J/K) y q es la carga del electrón. El factor A determina la
desviación de las características de una unión p-n ideal, e IS la
corriente inversa de saturación. IL representa la corriente
generada por la radiación solar (G). Dicha corriente exhibe
una relación respecto de la radiación y la temperatura.
(1)
P = I * V (2)
P n
p
V I
L
I
s
e
q
V
ns
P RS
V np
AKT
1
V
n
S
P R
S
P n
p
R
p
(3)
(4)
La expresión (1) (considerando la dependencia de los
parámetros con T y G), proporciona las curvas características
de I-V de un panel fotovoltaico, y su producto nos entrega la
potencia suministrada. Se muestra en la fig. 4 las curvas de un
panel determinado, así como la dependencia de las variables
con la temperatura y la radiación solar. En la curva se
representa el punto de máxima potencia (Vmppt), indicando el
punto óptimo de operación, para un uso eficiente del panel.
Puntos importantes de esta curva son la tensión a circuito
abierto (Voc) y la corriente de cortocircuito (Isc). La tensión
en circuito abierto representa la máxima tensión que
proporciona el panel a corriente cero (sin carga), la corriente
máxima en cortocircuito representa la máxima corriente que se
puede extraer del panel (carga en cortocircuito).
Figura 4.- Características I-V y P-V de un panel fotovoltaico.
B. Algoritmo “Perturbar y Observar (P&O)”
El algoritmo de perturbar y observar funciona bajo el
siguiente criterio, si el voltaje de operación V, del arreglo
fotovoltaico se perturba en cierta dirección y la potencia del
mismo incrementa significa que el punto de operación se ha
movido hacia el MPPT, por lo que el voltaje de operación
deberá perturbarse en la misma dirección, de otra forma si la
potencia extraída del arreglo fotovoltaico disminuye, el punto
de operación se ha movido en dirección opuesta de la
ubicación del MPPT, por lo tanto deberá ser perturbado en
dirección contraria a la que tenía [6].
En la fig. 5 se muestra el diagrama de flujo del algoritmo
P&O utilizado, donde la potencia medida (pact) es comparada
con la potencia anterior (pant), esto determina si aplica la
misma perturbación (pert es una variable binaria que indica la
dirección de la perturbación) o se deberá invertir en el
siguiente ciclo. La variable step representa el tamaño de la
perturbación y pwm es el valor del ciclo útil utilizado.
Figura 5.- Algoritmo Perturbar y Observar
I n
p
I
L
I
s
e
q
V
ns
IRS
np
AKT
1
V
n
S
IR
S
n
p
R
p
dP
dV
MPPT
0](https://image.slidesharecdn.com/memoria-ix-selasi-2013-lv-150303085824-conversion-gate01/75/Memoria-ix-selasi-2013-lv-417-2048.jpg)
![IX Seminario Euro Latinoamericano de Sistemas de Ingeniería 2013
ISBN 978-980-7630-00-9
400
P
o
v
i 2
r
i
P
i
P
o
C. Análisis Transitorio
Se utiliza un convertidor DC-DC para modificar la potencia
a la salida de los paneles fotovoltaicos, esta energía será
almacenada en un banco de baterías y se utilizará para él
funcionamiento del seguidor solar y un conversor DC-AC.
SEPIC (Single Ended Primary Inductor Converter) se ha
utilizado esta topología porque el voltaje de salida puede ser
más alto o más bajo que la entrada, además la salida no es
invertida como en el caso de la topología Cuk.
Figura 6.- Circuito equivalente de Thevenin de un panel
solar conectado a un conversor.
Figura 7.- Diseño del conversor Sepic
El circuito Sepic fig.7 funciona en modo de corriente del
inductor discontinuo (DICM) o el modo de tensión del
condensador (DCVM). Este tipo de convertidor tiene la
particularidad que la resistencia de entrada es proporcional a la
conmutación de frecuencia. Por lo tanto, mediante el ajuste del
ciclo de trabajo del interruptor principal, se puede hacer que la
resistencia de entrada del convertidor sea igual a la salida,
obteniendo una salida equivalente a la del panel. Esto asegura
la máxima transferencia de potencia.
La fig.6 muestra el circuito equivalente del panel solar
conectado a un seguidor de MPPT. El panel solar se modela
mediante un circuito equivalente de Thevenin, que consta de
una fuente vg conectada con una resistencia rg en serie a la
salida, alrededor del MPPT. Donde vg y rg están sujetos al
nivel de radiación solar y la temperatura. La entrada de voltaje
y la equivalente resistencia de entrada del conversor son vg y
rg, respectivamente. Suponiendo que no existe pérdida en el
convertidor, la potencia de entrada Pi en el seguidor es igual a
la potencia de salida Po del panel solar.
(5)
La variación de Pi con respecto a vi y ri será la siguiente
(6)
En el MPPT, la variación de potencia Pi es igual a cero y ri
igual a rg. Por lo tanto
(7)
Donde Vi es la tensión de entrada. Esta ecuación da las
características de entrada requeridas por el MPPT, donde vi
tiene una pequeña variación de señal de δri.
En la fig.6 el convertidor que está conectado al panel solar es
un SEPIC operando en DICM o DCVM [10], [11].
Para analizar este circuito, se analizara entre los dos estados de
conducción del transistor MOSFET, en estado encendido y
estado apagado. Para eso, se tendrá en cuenta el ciclo útil de
trabajo de la señal PWM que es usada para disparar el
transistor en los diferentes modos de conducción.
0 < t <DT
Durante este periodo de trabajo, el transistor es activado,
obteniendo el circuito equivalente que se muestra en la fig.8,
con sus respectivas tensiones y corrientes. Durante este
proceso, el inductor L1 es cargado con la tensión de la fuente
de entrada, mientras que el inductor L2 es cargado con la
energía almacenada por el condensador C1. Adicionalmente la
carga se encuentra aislada de la tensión de entrada y es
alimentada con la energía almacenada en el condensador de
salida C2:
Figura 8. Circuito equivalente
La tensión a través del inductor L1 está determinada por la
relación
DT
i
L
dt
di
LVV LL
IONL
1
1
1
11
(8)
La tensión que aparece a través del inductor L2 es igual a
ƏP
i
2
v
i
r
i
Əv
i
v
i
2
r
i
2
Ər
i
δv
i
δr
i
Əv
i
Ər
i
Əv
i
Ər
i
V
i
2 r
g
](https://image.slidesharecdn.com/memoria-ix-selasi-2013-lv-150303085824-conversion-gate01/75/Memoria-ix-selasi-2013-lv-418-2048.jpg)

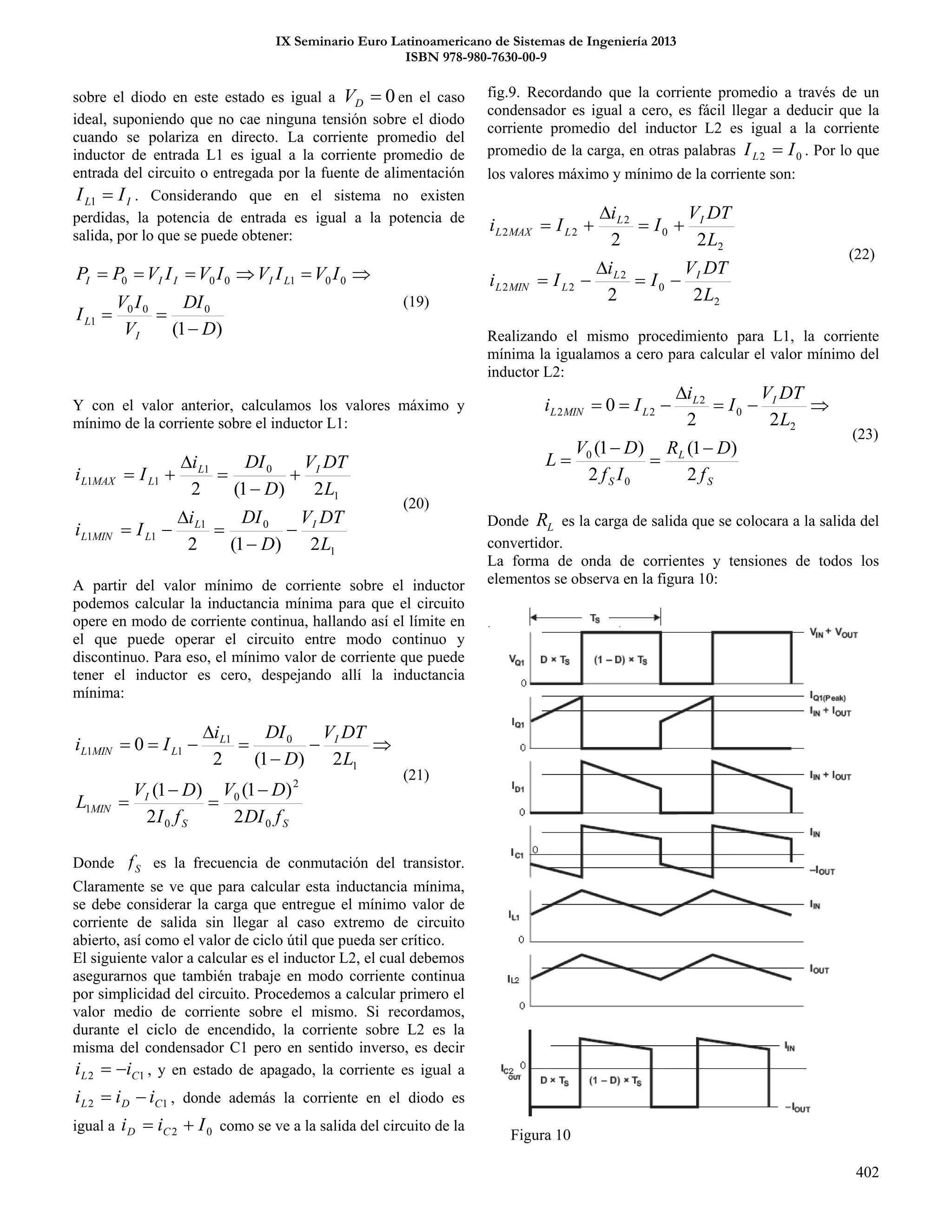

![IX Seminario Euro Latinoamericano de Sistemas de Ingeniería 2013
ISBN 978-980-7630-00-9
404
Figura 14.- Respuesta de Corriente
Figura 13.- Respuesta de Potencia
Se usó un panel fotovoltaico Isofotón I-110, que tiene una
tensión nominal 12V, una potencia máxima de 110W,
corriente de cortocircuito 6.54A, tensión de circuito abierto
21.6V, corriente de máxima potencia 6.1A, tensión de máxima
potencia 17.4V.
Inductor L1 = 1mF, L2 = 300uF, C1=100uF, C2=1000uF,
frecuencia de 73 kHz y ciclo de carga del 50% regulado por el
control de MPPT.
III. CONCLUSIONES
Una sección de conclusiones no se requiere. Aunque una
conclusión puede repasar los puntos principales del
documento, no reproduzca lo del resumen como conclusión.
Una conclusión podría extender la importancia del trabajo o
podría hacer pensar en aplicaciones y extensiones.
REFERENCIAS
[1] Rashid Muhammad H. and Lana Char “Solar Power
Conversion” Power Electronics Handbook, Capítulo 26,
pp. 661 – 672, Academic Press, Segunda edición, 2007.
[2] N. Femia, G. Petrone, G. Spagnuolo and M. Vitelli
“Optimizing Duty-cycle Perturbation of P&O MPPT
Techinque” Power Electronics Especialists Conference,
2004. PESC 2004. 35th Annnual. vol. 3, pp 1939 – 1944,
20 –25 Junio 2004.
[3] Trishan Esram and Patrick L. Chapman “Comparision of
Photovoltaic Array Maximum Power Point Tracking
techniques”, IEEE Transactions on energy conversion, vol
22 (2), Junio de 2007.
[4] Trishan Esram and Patrick L. Chapman “Comparision of
Photovoltaic Array Maximum Power Point Tracking
Arrays Using Ripple Correlation Control” IEEE
Transactions on Power Electronics, vol. 21 (5),
Septiembre 2006.
[5] Chad Alberts, Justin Brown, Rpbert Button, Anna Flower
and Srinivasa Vemuru “Solar Array Peak Power Tracker”,
American Socierty, 31 Marzo de 2006 – 1 Abril 2006.
[6] Dezso Sera, Tamas Kerekes, Remus Teodorescu and
Frede Blaabjerg “Improved MPPT algorithms for rapidly
changing enviromental conditions”, Power Electronics
and Motion Control Conference, 2006. EPE-PEMC
2006, pp 1614–1619, 12th International. 30 Agosto 2006
1 Septiembre 2006.
[7] J. Kouta, A. El-Ali, N. Moubayed, and R. Outlib
“Improving the incremental conductance control
method of a solar energy conversion system”,
International Conference on Renewable Energy and
Power Quality (ICREPQ'08), Santander, Spain, March
12-14 2008.
[8] Castro, Energias Renováveis e Producao Descentralizada,
Introducao a energía fotovoltaica, Rui M.G. Castro,
Universidad Técnica de Lisboa, 2004.
[9] J.A. Grow, C.D. Manning : “Development of a
photovoltaic array model for use in power-electronics
simulation studies”. IEE Proc. On Electric Power
Applications, vol. 146, no. 2, pp, 193-200, March 1999.
[10]B. Lin and Y. Lee, “Power-factor correction using Cuk
converters in dis-continuous-capacitor-voltage mode
operation,” IEEE Trans. Ind. Electron., vol. 44, pp. 648-
653, Oct. 1997.
[11]D. Maksimovic and S. Cuk, “A unified analysis of PWM
converters in discontinuous modes,” IEEE Trans. Power
Electron., vol. 6 pp. 476-490, Mar. 1991.](https://image.slidesharecdn.com/memoria-ix-selasi-2013-lv-150303085824-conversion-gate01/75/Memoria-ix-selasi-2013-lv-422-2048.jpg)

![IX Seminario Euro Latinoamericano de Sistemas de Ingeniería 2013
ISBN 978-980-7630-00-9
406
bagazo requerida, posibilita mantener la presión del vapor
dentro de los límites establecidos, independientemente de
las variaciones en la carga.
2. Mantener una correcta relación aire/bagazo, lo cual
garantiza que la combustión sea completa dentro de los
límites de diseño de la caldera.
3. Mantener el nivel de agua en el domo superior dentro de
los límites óptimos de operación.
El central “Héctor Molina Riaño” perteneciente al grupo
AZCUBA se dedica a la obtención de azúcar crudo, como
producto principal, electricidad, cachaza y miel para ser
utilizada en la elaboración de alcoholes en la destilería
anexa a este central. La capacidad potencial de molida es de
10000 toneladas por día, índice que lo ubica entre los
centrales más grandes de todo el país.
La meta esencial para este central azucarero en estos
momentos consiste en aumentar la producción de azúcar
para la zafra venidera, así como elevar la eficiencia
económica del proceso de producción. Pero existe un
problema y es que actualmente el control de nivel en el
domo superior de la caldera bagacera “Retal GV-45-18”
que se encuentra ubicada en el área de generación de vapor
de este central no se efectúa de forma correcta pues el nivel
no sigue el valor de referencia y además se ve
considerablemente afectado por las constantes
fluctuaciones en la demanda de vapor y la calidad del
bagazo, elementos que constituyen perturbaciones para el
proceso. Todo esto provoca ineficiencia en la generación de
vapor, un aumento considerable del índice de tiempo
perdido y por consiguiente un incumplimiento del plan de
producción.
Por tanto en aras de asegurar un incremento de la eficiencia
del proceso de generación de vapor, a través de un control
efectivo del flujo de agua de alimentación; se propone el
diseño de controladores, utilizando estrategias de control
basado en modelo interno (IMC) y control predictivo
basado en modelos (CPBM), que sustituyan las actuales
limitaciones de la estrategia basada en PID que allí se
emplea.
2. PARTE EXPERIMENTAL
Caldera bagacera Retal GV-45-18
El generador de vapor (GV) “Retal GV-45-18”, está
compuesto por cuatro domos, es del tipo acuotubular y de
tiro natural. Además, se encuentra diseñado para la
combustión alternativa o combinada de dos tipos de
combustibles: bagazo y fuel-oil. Actualmente, su operación
se realiza en la mayoría de los centrales sólo con bagazo y
en una minoría solo con fuel-oil.
Un esquema tecnológico simplificado del GV “Retal GV-
45-18” se muestra en la Figura 1, en la que se puede
apreciar sus partes fundamentales [1].
Figura 1: Esquema tecnológico simplificado del GV “Retal
GV-45-18”. 1. Horno 2. Alimentadores 3. Sobrecalentador
4. Economizador 5. Calentador de aire 6. Domos y haces de
tubos 7. Sistema de Tiro.
De acuerdo con las características del domo superior del
GV “Retal GV-45-18”, la gama de operación normal del
nivel es de ±50 mm a partir del nivel de referencia (250
mm). Debido a las características constructivas de estos
GV, como las de trabajar a presiones medias, ser de
vaporización rápida y estar sometida a cambios bruscos en
la carga, la regulación del nivel se convierte en una
necesidad indispensable. En esta regulación intervienen las
siguientes variables:
. Nivel de agua en el domo superior del GV: nivel que
alcanza la mezcla de agua-vapor en el domo superior del
GV y que constituye la variable controlada. Se mide en mm
a partir de un punto de referencia usando el transmisor de
presión diferencial.
. Flujo de vapor demandado por el generador: vapor
utilizado por el equipo o proceso tecnológico conectado al
GV; su flujo gravimétrico constituye la perturbación
predominante para condiciones de operación estable, por lo
que se toma como perturbación fundamental. Se mide en t/h
usando un transmisor de presión diferencial SITRANS P.
. Agua de alimentación al domo superior del GV:
constituye la variable manipulada. Sobre esta variable
actúan a su vez como perturbaciones secundarias, las
variaciones de presión en el domo del GV y las variaciones
de presión que se producen en la descarga de alimentación.
El flujo de agua de alimentación se manipula mediante una
válvula neumática.
Modelo del proceso de variación de nivel en función del](https://image.slidesharecdn.com/memoria-ix-selasi-2013-lv-150303085824-conversion-gate01/75/Memoria-ix-selasi-2013-lv-424-2048.jpg)
![IX Seminario Euro Latinoamericano de Sistemas de Ingeniería 2013
ISBN 978-980-7630-00-9
407
flujo de agua de alimentación
El proceso de nivel en el domo presenta un comportamiento
dinámico complejo lo cual hace en extremo trabajoso la
obtención de un modelo matemático mediante la técnica de
modelado de sistemas. Por tanto en la síntesis de
controladores suelen utilizarse aproximaciones, a estas
dinámicas complejas, obtenidas mediante la identificación
de sistemas. Las señales utilizadas con más frecuencia son
los escalones y las señales binarias pseudo aleatorias
(SBSA).
Según [2] las SBSA se codifican mediante secuencias de
ceros y unos que satisfacen una ecuación de diferencias del
tipo mostrado en (1):
(1)
donde:
(+): Operador de suma módulo 2.
x(t): Variable binaria que asume valores 0 o 1.
ai: Coeficientes binarios que asumen también valores 0 o 1.
m: Orden de la secuencia.
D: Operador de retardo, de manera que Dm x( t )= x(t-m).
Según [2] el orden de la secuencia se escoge generalmente
de 5o 6 y se recomienda realizar al menos dos réplicas de la
misma. Un orden mayor implicaría un experimento
excesivamente largo, dificilmente realizable en la práctica.
Las SBSA son secuencias periódicas con período N según
(2).
(2)
Otro parámetro de diseño de la SBSA es el tiempo de
retención o conmutación de la SBSA, el cual debe
estimarse atendiendo a consideraciones prácticas y a la
dinámica del proceso en cuestión. Aunque, según
[3], el tiempo de retención de la señal (Tr) puede ser
calculado como se muestra en (3).
(3)
donde:
τdom : Constante de tiempo dominante del sistema.
αs Factor que representa la constante de velocidad de
respuesta en lazo cen·ado. Su valor por defecto para
aplicaciones de control de procesos es 2.
Un diagrama genérico del proceso de variación de nivel en
el domo superior del GV se muestra en la Figura 2.
Figura 2: Diagrama genérico del proceso de variación de
nivel en el domo superior
En la Tabla 1 se muestran las condiciones de operación del
proceso de variación de nivel.
Tabla l. Condiciones de operación del proceso de variación
de la temperatura.
La Tabla 2 muestra las condiciones y caractelisticas para
las cuales se generaron las SBSA para el proceso de
identificación de la variable de interés. De forma gráfica la
Figura. 3 muestra la SBSA a utilizar y aplicar en la variable
manipulada así como la respuesta del nivel en el domo ti·as
su aplicación.
Tabla 2. Características de la SBSA generada.
Figura 2. Gráfico de comportamiento del nivel ante la
SBSA en la corriente del posicionador.
Debido a la complejidad del proceso, para describir su
comportamientos dinámicos se va a proponer una función
transferencial de segundo orden con retardo de tiempo tal
como muestra (4), [4]](https://image.slidesharecdn.com/memoria-ix-selasi-2013-lv-150303085824-conversion-gate01/75/Memoria-ix-selasi-2013-lv-425-2048.jpg)
![IX Seminario Euro Latinoamericano de Sistemas de Ingeniería 2013
ISBN 978-980-7630-00-9
408
(4)
Los valores estimados para los parámetros del modelo
matemático se muestran en la Tabla 3. Para poder llevar a
cabo una estimación exitosa fue necesario realizar un
tratamiento de los datos obtenidos en la identificación,
entiéndase suavizado e interpolación de los mismos.
Tabla 3. Parámetros del modelo matemático del proceso de
nivel ante variaciones en el flujo de agua.
Para la validación de los parámetros estimados según la
estructura de modelo seleccionada se utilizaron tanto
técnicas estadísticas (coeficiente de ajuste o aproximación
(Fit), coeficiente de determinación o proporción de la
varianza (VAF)) como técnicas basadas en comparación de
datos [5]. Los resultados de validación para el modelo
matemático con los parámetros estimados se muestran en la
Figura. 3.
Figura 3. Gráfico de validación del modelo matemático con
los valores de los parámetros estimados, Fit=
82 %, VAF=96.7%.
Modelo del proceso de variación de nivel en función del
flujo de vapor demandado (perturbación)
En este caso por cuestiones de seguridad no fue posible
generar fluctuaciones en el flujo de vapor demandado a
partir de la aplicación de señales físicas tradicionales,
elemento que constituye una desventaja para el
experimento. Por lo que se decidió recurrir a los históricos
del sistema de control y adquisición de datos (SCADA)
para recoger variaciones de nivel provocadas a partir de
fluctuaciones en el flujo de vapor demandado durante un
tiempo determinado utilizando un período de muestreo de
15 s. De esta forma no se suponen comportamientos
arbitrarios de la perturbación, sino, se parte de su
comportamiento real, para obtener un modelo matemático
que permita analizar la robustez del controlador durante su
etapa de diseño.
Figura 4. Gráfico de comportamiento del nivel ante las
variaciones en el flujo de vapor.
Debido a la complejidad del proceso, para describir sus
comportamiento dinámico se va a proponer una función
transferencial de segundo orden con retardo de tiempo y un
cero tal como muestra (5).
(5)
Donde k es la ganancia estática, T1, T2 son las constantes
de tiempo para cada polo, T3 es la constante de tiempo
asociada al cero y τ es el retardo de tiempo [4].
Los valores estimados para los parámetros del modelo
matemático se muestran en la Tabla 4:
Tabla 4. Parámetros del modelo matemático del proceso de
nivel ante variaciones en el flujo de vapor.
Para la validación de los parámetros estimados según la
estructura de modelo seleccionada se utilizaron tanto
técnicas estadísticas (coeficiente de ajuste o aproximación
(Fit), coeficiente de determinación o proporción de la
varianza (VAF)) como técnicas basadas en comparación de
datos [5]. Los resultados de validación para el modelo
matemático con los parámetros estimados se muestran en
las Figura 5.
Figura 5. Gráfico de validación del modelo matemático con
los valores de los parámetros estimados. Fit=83.15 %,
VAF=97.16%.](https://image.slidesharecdn.com/memoria-ix-selasi-2013-lv-150303085824-conversion-gate01/75/Memoria-ix-selasi-2013-lv-426-2048.jpg)
![IX Seminario Euro Latinoamericano de Sistemas de Ingeniería 2013
ISBN 978-980-7630-00-9
409
3. RESULTADOS Y DISCUSIÓN
Diseño de controladores para el proceso de variación de
temperatura en el horno secador
Teniendo en cuenta la presencia de perturbaciones
considerables en el flujo de vapor, se propone como
esquema de control el mostrado en la Figura 6. Para este
esquema se llevará a cabo el diseño de controladores que
sean capaces de suplir las limitaciones de la estrategia de
control PID que en estos momentos existe en el proceso
bajo estudio, de forma tal que redunde en una operación
mucho más eficiente y contribuya a un ahorro de energía en
la operación del generador de vapor. Tres controladores van
a ser estudiados y comparados: el controlador PID con
estructura convencional, el controlador IMC estándar y un
CPBM.
Figura 6. Esquema genérico utilizado para el diseño de los
controladores.
Todos estos controladores van a ser diseñados con el
objetivo de que describan un comportamiento dinámico
acorde a las especificaciones de diseño establecidas según
exigencias de operación para el proceso. El análisis del
desempeño de cada uno de los controladores se realizará en
base al por ciento de pico máximo (%Mp), tiempo de
establecimiento (Te) según el criterio del 2% y rechazo a
perturbaciones.
Especificaciones de diseño
A continuación se presentan las especificaciones de diseño
a tener en cuenta para la síntesis de cada uno de los
controladores. Con respecto a la velocidad de respuesta
nominal del proceso controlado, es posible comprobarla a
través del tiempo de establecimiento. Para el proceso bajo
estudio utilizando el modelo nominal se consideraría un
buen tiempo de establecimiento cualquier tiempo por
debajo de 3 minutos. El error de estado estacionario nulo
debe ser comprobado para una referencia variable que tome
valores entre 200 y 300 mm. De igual forma el porciento de
pico máximo debe ser mínimo para entradas tipo paso
escalón. El retardo de tiempo propio del proceso de
variación de nivel no llega a alcanzar el valor de la
constante de tiempo fundamental del sistema identificado,
sin embargo debe tenerse en cuenta. Como
modelo matemático de la perturbación se va a tomar el
modelo presentado en (5) y va a representar las variaciones
del nivel ante cambios en el flujo de vapor.
Controlador PID estándar
A partir de los métodos clásicos de diseño de controladores
PID estándar [6] se obtienen los valores iniciales de los
parámetros de la función transferencial para el controlador
PI resultante. Se debe resaltar que los valores finales no se
obtuvieron solamente de forma analítica, sino que se
necesitó de una etapa de prueba y error para lograr un
ajuste fino de estos. Logrando finalmente obtener la
función transferencial del PI que se muestra en (6).
(6)
Controlador IMC
En el diseño del controlador IMC [3], [7] se tuvo en cuenta
el retardo de tiempo presente en el modelo identificado y el
mismo fue reemplazado por una aproximación de Pade de
primer orden quedando definidas de esta forma, según el
modelo nominal de la planta, las componentes invertible y
no invertible del controlador. Estas se muestran en la
ecuación 7.
(7)
La función transferencial del controlador IMC resultante se
presenta en la ecuación 8, en función de la constante de
tiempo del filtro pasa bajo (Tf).
(8)
Existen varios criterios para la selección de Tf [3], [7]. Sin
embargo estos criterios solo aseguran un valor de partida
que debe ser mejorado a partir del método de prueba y
error. Un buen valor para Tf dado el modelo nominal de
la planta es Tf = 3.8.
Controlador predictivo basado en modelos
Para el diseño del CPBM [8], [9] fueron utilizados como
modelos de referencia para la planta y la perturbación los
modelos lineales descritos en (4) y (5) respectivamente.
Como función de coste a optimizar se utilizó la descrita en
(9), donde lo que se trata es de encontrar los valores
óptimos del flujo de agua (Qa), de forma tal que se
minimice el funcional J. Este funcional está definido como
una fórmula cuadrática del error entre la salida predicha y
la trayectoria de referencia más el esfuerzo de control. Con
el objetivo de llevar la salida al punto de operación deseado](https://image.slidesharecdn.com/memoria-ix-selasi-2013-lv-150303085824-conversion-gate01/75/Memoria-ix-selasi-2013-lv-427-2048.jpg)


![IX Seminario Euro Latinoamericano de Sistemas de Ingeniería 2013
ISBN 978-980-7630-00-9
412
DISEÑO DE UN CONTROLADOR MULTIVARIABLE IMC DESACOPLADO PARA UNA
UNIDAD MANEJADORA DE AIRE
DESIGN OF AN IMC DECOUPLING MULTIVARIABLE CONTROLLER FOR AN AIR
HANDLING UNIT
Ernesto Fernández Rodríguez1
, Osmany Oramas Padrón1
, Marcos A. Pérez Milián2
1
Departamento de Automática y Computación del ISPJAE. Av. 114 #11901, Marianao, CP 19390, La Habana,
Cuba.
2
Centro Nacional de Biopreparados. Carretera Bejucal, Mayabeque, Cuba
e-mail: erne@electrica.cujae.edu.cu.
RESUMEN: En este artículo se propone una estrategia de control por desacople basada en control por modelo interno entre la
temperatura de impulsión y la humedad relativa de una Unidad Manejadora de Aire (UMA) la cual controla el clima de un local de
formulaciones del Centro Nacional de Biopreparados (Bio-Cen). Para el diseño del controlador, primero se obtienen los modelos
matemáticos de ambos procesos utilizando técnicas de identificación de sistemas mediante la aplicación de una señal binaria
pseudoaleatoria (SBSA), después se obtienen los modelos matemáticos de la interacción entre ambas variables utilizando una señal
tipo paso escalón. Finalmente se muestran los resultados obtenidos mediante simulación, así como la comparación del controlador
propuesto con la actual estrategia de control con que opera el proceso, con el objetivo de demostrar el mejor desempeño de la
propuesta realizada para el seguimiento de referencias y ante perturbaciones. Para realizar una propuesta más completa se tienen en
cuenta en los resultados la evolución de las acciones de control para cada controlador.
Palabras Claves: Control por desacople, señal binaria pseudoaleatoria, clima, IMC
Abstract: In this paper it is propose a decoupling control strategy based in internal model control of the drive temperature and
relative humidity of Air Handling Unit (AHU) which controls the climate of a formulations local in (Bio-Cen). To design the controller,
first mathematical models are obtained in both processes using system identification techniques by applying a pseudo-random
binary signal (PRBS), then it is get the mathematical models of interaction between the two variables using a step signal. Finally,
the results obtained in the simulation are shown, as well as the comparison between the current control strategy and the proposed
controller, in order to demonstrate the better performance of the proposal controller, following references and rejecting perturbations.
Para realizar una propuesta más completa se tienen en cuenta en los resultados la evolución de las acciones de control para cada
controlador.
Keywords: Decoupling control, pseudo-random binary signal, climate, IMC
1. INTRODUCCIÓN
El Centro Nacional de Biopreparados (Bio-Cen) produce
medicamentos que están destinados primordialmente al
sistema de atención de la salud cubana y una parte de la
producción se destina a la exportación y comercialización en
divisas en aras de ayudar al autofinanciamiento del sistema y
a la adquisición de nuevas tecnologías. Este centro es una de
las principales instituciones de la biotecnología en Cuba y
acumula experiencia en distintas tecnologías de producción
de vacunas, biofármacos, medios de cultivo para
microbiología y antianémicos. El centro cuenta con la planta
de Producción de Parenterales 3 la cual está dedicada
fundamentalmente a la formulación, llenado y liofilización
de productos fármacos tales como el Heberpenta líquido, el
Heberprot-P y el Interferón. En ella se encuentra la sala de
Formulaciones I donde al llegar la solución del producto
previamente preparado, se le añade el Ingrediente
Farmacéutico Activo (IFA), y los excipientes como el
manitol y la albúmina. En esta sala se detectaron deficiencias
en el control de temperatura y humedad relativa por
parte de la UMA 1006 debido aperturbaciones ya que el flujo
de agua de enfriamiento y deshumificación se encuentra en
mal estado y este en ocasiones no llega con la temperatura
requerida de 8 °C, además existe un mal diseño en el circuito
de abastecimiento de agua que provoca que el caudal
suministrado a la manejadora no sea el correcto. El control
PID, presente en la planta, con el ajuste actual no garantiza
un control eficiente de la temperatura y la humedad relativa
debido a su vulnerabilidad frente a perturbaciones lo cual
provoca que muchos lotes tengan que ser desechados ya que
el producto no sale con la calidad requerida. En el año 2012
se realizaron dos proyectos que mejoraron el sistema de
control de la UMA utilizando estrategias de control por
modelo interno (IMC), con las cuales se redujo el efecto de
las perturbaciones aunque no lograron eliminarlas, pues no
se consideraron las interacciones entre la temperatura de
impulsión y la humedad relativa, ya que fueron trabajadas
ambas variables de forma independiente. [1]](https://image.slidesharecdn.com/memoria-ix-selasi-2013-lv-150303085824-conversion-gate01/75/Memoria-ix-selasi-2013-lv-430-2048.jpg)
![IX Seminario Euro Latinoamericano de Sistemas de Ingeniería 2013
ISBN 978-980-7630-00-9
413
Con la presente investigación se prevé eliminar el efecto de
la interacción entre ambas variables. Para ello se ha de
retomar el estudio de las investigaciones precedentes, pero
aportando mejoras en cuanto al modelado de la dinámica del
sistema y el diseño del algoritmo de regulación. El objetivo
del artículo no radica en precisar las deficiencias de los
estudios anteriores, sino más bien en mostrar los beneficios y
las mejoras que se introducen a partir de la presente
propuesta. La idea radica en la posibilidad de elevar el
rendimiento de la UMA ante posibles perturbaciones,
logrando minimizar sus efectos con la implementación de un
sistema de control multivariable utilizando técnicas de
control por desacople.
2. MATERIALES Y MÉTODOS
Descripción tecnológica
La UMA 1006 se encuentra ubicada en el piso técnico de la
planta PP3 la cual recibe el aire del retorno, éste en su
recorrido pierde sus propiedades por eso es preciso adherirlo
con un aire de renovación para cambiar el dioxígeno y así no
recircular el mismo aire, después de esta mezcla pasa a
través de un pre-filtro, luego pasa a través de un filtro bolsa
de 0.5 micras, ambos filtros tienen un indicador de presión
para saber sus estados. Este aire choca con las baterías de
frío por las cuales circula agua fría proveniente de un
enfriador la cual lo enfría y deshumidifica, en dependencia
de la humedad relativa detectada por el sensor ubicado en los
conductos de retorno del aire se regula el flujo de agua fría a
través de la válvula de tres vías, controlando así la humedad
relativa que debe ser del 60 ± 10%. Luego pasa por los
recalentadores para el control de la temperatura. Estos
recalentadores consisten en dos baterías de resistencias, una
analógica y una digital. En el banco de resistencias analógico
se realiza el control de la temperatura de forma continua,
regulando la cantidad de corriente con que opera el mismo.
A mayor corriente eléctrica suministrada, mayor será la
temperatura generada (Estos valores de temperatura deben
estar entre 20 ± 2ºC). El valor de corriente necesario para la
temperatura adecuada se determina mediante una tabla que
emplea los valores de temperatura del flujo de impulsión y
de retorno para lo cual se encuentran instaladas dos sondas
en los respectivos conductos de ventilación. El controlador
realiza el análisis con cada par de valores de temperatura
censados y envía la señal de control en el rango de 0-10 V
hacia el banco de resistencias. Si no se logra la temperatura
adecuada se enciende el banco de resistencia digital
suministrando más calor, lo que sobre este no se tiene un
control continuo. Más adelante el ventilador hace circular el
aire por la red de ductos a través de la instalación, la falta de
flujo se detecta con un detector de flujo que manda una señal
digital 0 o 1, además se censa el valor de la presión del aire
de impulsión con presostatos diferenciales (transmisor de
presión diferencial), este valor es enviado al DDC y éste a su
vez manda una señal de 0-10V hacia el convertidor de
frecuencia de esta forma se controla el caudal de aire de
salida, posteriormente en el área existe un filtro Hepa para
garantizar que el aire que llega sea lo más limpio posible. [2]
El proceso cuenta con un cuarto de supervisión en el cual se
encuentra el sistema de control y adquisición de datos
(SCADA) donde se visualizan los valores de las diferentes
variables de interés y se puede actuar sobre el proceso
cambiando las condiciones de trabajo. El diagrama
tecnológico del proceso de clima es el que se ilustra en la
Figura 1. [2]
Figura 1: Diagrama tecnológico simplificado de la UMA
1006.
Requerimientos
El objetivo fundamental del diseño radica en la eliminación
de las perturbaciones que pueden ocurrir en ambas variables
debido a la interacción que existe entre ellas. En principio las
variaciones de la temperatura del agua fría que afecten el
control de temperatura de impulsión no deben reflejarse
como perturbaciones en el control de la humedad relativa, así
mismo variaciones de temperatura en el local que afecten el
control de la humedad relativa, no deben reflejarse como
perturbaciones en el control de la temperatura de impulsión.
Para mejorar y hacer más eficiente el sistema de control de
clima en el local, hay que lograr, para ambas variables, un
tiempo de establecimiento (Ts) inferior a los 25 minutos y un
porciento de pico máximo (%Mp) mínimo para entradas de
tipo paso escalón. Para la temperatura de impulsión se debe
lograr un error de estado estacionario (Eee) nulo para una
referencia de 19°C y en cuanto a la humedad relativa un
error de estado estacionario nulo para referencia del 60%.
Identificación del sistema
La identificación de sistemas para la obtención de modelos
matemáticos es el enfoque resulta generalmente más directo
y puede producir resultados a más corto plazo. Las señales
utilizadas con más frecuencia son los escalones y las SBSA.
La restricción más importante de esta solución es la](https://image.slidesharecdn.com/memoria-ix-selasi-2013-lv-150303085824-conversion-gate01/75/Memoria-ix-selasi-2013-lv-431-2048.jpg)
![IX Seminario Euro Latinoamericano de Sistemas de Ingeniería 2013
ISBN 978-980-7630-00-9
414
necesidad de introducir perturbaciones indeseables en el
proceso que a menudo tropiezan con la resistencia de los
operadores.
Según [3] las SBSA se codifican mediante secuencias de
ceros y unos que satisfacen una ecuación de diferencias del
tipo mostrado en (1):
(1)
donde:
(+): Operador de suma módulo 2.
x(t): Variable binaria que asume valores 0 o 1.
ai: Coeficientes binarios que asumen también valores 0 o 1.
m: Orden de la secuencia.
D: Operador de retardo, de manera que Dm x(t)= x(t-m).
Según [3] el orden de la secuencia se escoge generalmente
de 5 o 6 y se recomienda realizar al menos dos réplicas de la
misma. Un orden mayor implicaría un experimento
excesivamente largo, difícilmente realizable en la práctica.
Las SBSA son secuencias periódicas con período N según
(2).
N 2m
1 (2)
Otro parámetro de diseño de la SBSA es el tiempo de
retención o conmutación de la SBSA, el cual debe estimarse
atendiendo a consideraciones prácticas y a la dinámica del
proceso en cuestión. Aunque, según [4], el tiempo de
retención de la señal (Tr) puede ser calculado como se
muestra en (3).
(3)
donde:
dom: Constante de tiempo dominante del sistema.
s: Factor que representa la constante de velocidad de
respuesta en lazo cerrado. Su valor por defecto para
aplicaciones de control de procesos es 2.
Procesos de variación de temperatura de impulsión y
humedad relativa
En la Figura 2a se muestra el diagrama en bloques genérico
del proceso de variación de la temperatura de impulsión y en
la Tabla 1 aparecen las condiciones de operación. La Figura
2b muestra el diagrama en bloques genérico del proceso de
variación de la humedad relativa y en la Tabla 2 se observan las
condiciones de operación. [2]
Figura 2: Diagramas en bloques genéricos. (a) Variación de
la temperatura de impulsión. (b) Variación de la humedad
relativa.
Variables manipuladas: Tensión en el banco de resistencias
y tensión en la válvula de agua fría.
Variables controladas: Temperatura de impulsión y
humedad relativa del aire extraído.
Perturbaciones: Flujo del agua fría y temperatura del aire.
Tabla 1: Condiciones de operación del proceso de variación
de la temperatura de impulsión.
Variable Límites
físicos
Límites de
operación
Punto de
operaciónControlada
[°C]
12 – 26 15 - 20 19
Manipulada
[V]
0 – 10 4 - 10 7
Perturbación
[m3
/s]
0 – 3*10-3
0 - 3*10-3
1.8*10-3
Tabla 2: Condiciones de operación del proceso de variación
de la humedad relativa.
Variable Límites
físicos
Límites de
operación
Punto de
operaciónControlada
[%]
20 – 80 50 - 70 60
Manipulada
[V]
0 – 10 3 – 7 4
Perturbación
[°C]
14 – 26 17 - 22 19
Generación y aplicación de la SBSA
La Tabla 3 muestra las condiciones y características para las
cuales se generaron las SBSA para la identificación de los
procesos de interés. De forma gráfica en las Figuras 3 y 4 se
observan las SBSA a utilizar y aplicar en cada variable
manipulada, así como las respuestas de las variables a
controlar. En estos gráficos asociados a mediciones reales del
proceso y los gráficos de validación de modelos, el
comportamiento de las variables se presenta en función de
las muestras adquiridas según el período de muestreo
seleccionado en cada caso. [2]
Tabla 3. Características de las SBSA generadas.
Figura 3: Temperatura de impulsión. (a) SBSA utilizada en
los experimentos de identificación. (b) Comportamiento de la
temperatura ante la SBSA aplicada.](https://image.slidesharecdn.com/memoria-ix-selasi-2013-lv-150303085824-conversion-gate01/75/Memoria-ix-selasi-2013-lv-432-2048.jpg)
![IX Seminario Euro Latinoamericano de Sistemas de Ingeniería 2013
ISBN 978-980-7630-00-9
415
Figura 4: Humedad relativa. (a) SBSA utilizada en los
experimentos de identificación. (b) Comportamiento de la
humedad relativa ante la SBSA aplicada.
Figura 3: Temperatura de impulsión. (a) SBSA utilizada en
los experimentos de identificación. (b) Comportamiento de la
temperatura ante la SBSA aplicada.
Figura 4: Humedad relativa. (a) SBSA utilizada en los
experimentos de identificación. (b) Comportamiento de la
humedad relativa ante la SBSA aplicada.
Para la aplicación de estas SBSA se utilizó un SCADA
realizado con el software DESIGO INSIGHT®. Este
SCADA permite la visualización y registro de las variables
fundamentales a controlar en la UMA, así como la
modificación por el usuario de los valores de las variables
manipuladas. El autómata es un controlador modulador de la
serie PXC64-U. Este sistema se compone esencialmente de
paneles de control que trabajan con autonomía. Para el
monitoreo y control central, los paneles de control digital
deberán estar conectados, mediante un Bus de datos (C-Bus) a
la computadora central. Este controlador modulador cuenta
con módulos de entradas digitales, para este caso 16 entradas
digitales, 6 módulos de relés y 8 módulos universales de
entrada - salida.
Obtención de los modelos matemáticos y su validación
Para llevar a cabo la identificación de cada uno de los
procesos se tuvieron en cuenta varias estructuras de modelos
matemáticos, así como la estimación de los parámetros en
cada caso. Partiendo de un compromiso, entre el
conocimiento de la dinámica del proceso y la necesidad de
un modelo simple para futuras aplicaciones, se propone
como estructura, en ambos casos, una función transferencial
de segundo orden con retardo de tiempo y un cero tal como
muestra (4). [5]
(4)
Donde k es la ganancia estática; T1 y T2 son las constantes de
tiempo para cada polo; T3 es la constante de tiempo asociada
al cero y τ es el retardo de tiempo. Se considera que T1 es la
constante de tiempo dominante (o sea la mayor constante de
tiempo, asociada a la dinámica de cada proceso), mientras
que T2 es la menor constante de tiempo (representa la
dinámica del actuador + las dinámicas secundarias de los
procesos). [5] Aunque se analizaron otras estructuras de
mayor complejidad estas no ofrecían mejoras significativas
en el desempeño dinámico de los procesos en estudio. Los
valores estimados para los parámetros de cada modelo
matemático a partir de la herramienta descrita en [6] se
muestran en la Tabla 4.
Para la validación de los parámetros estimados según las
estructuras de modelos seleccionados se utilizaron tanto
técnicas estadísticas como técnicas basadas en comparación
de datos entre las que se encuentran el error de simulación
(ES), el error de predicción final (EPF) y el coeficiente de
determinación o proporción de la varianza (VAF). Los
resultados de validación para los modelos matemáticos con
los parámetros estimados para cada proceso se muestran en
la Figura 5. [2]
Tabla 4: Parámetros de los modelos matemáticos de cada
Figura 5: Validación de los modelos matemáticos. (a)
Temperatura de impulsión. ES=2.53 %, EPF=0.22 %,
VAF=94.38 % (b) Humedad relativa. ES=1.03 %, EPF=0.84
%, VAF=96.64 %.
Modelos de las interacciones entre variables
Para obtener el modelo del comportamiento de la
temperatura ante variaciones en la humedad relativa, se
aplicó un paso escalón de 0-10 V en la válvula de agua fría
(Figura 6a) manteniendo constante la tensión en el banco de
resistencias y se obtuvo el comportamiento gráfico de la
variación de temperatura (Figura
6b) con un período de muestreo de 30 segundos. Para obtener
el modelo del comportamiento de la humedad relativa ante
variaciones en la temperatura, se aplicó un paso escalón de 0-
10 V en el banco de resistencias (Figura 7a) manteniendo
constante la tensión en la válvula de agua fría y se obtuvo
el comportamiento gráfico de la variación de humedad
relativa (Figura 7b) con un período de muestreo de 10
segundos.](https://image.slidesharecdn.com/memoria-ix-selasi-2013-lv-150303085824-conversion-gate01/75/Memoria-ix-selasi-2013-lv-433-2048.jpg)
![IX Seminario Euro Latinoamericano de Sistemas de Ingeniería 2013
ISBN 978-980-7630-00-9
416
Figura 6: (a) Paso escalón en la válvula aso escalón en el
banco de resistencias. (b) Respuesta de la humedad relativa
ante variaciones de la temperatura.
Figura 7: (a) Paso escalón en el banco de resistencias. (b)
Respuesta de la humedad relativa ante variaciones de la
temperatura.
Dada la necesidad de un modelo simple para futuras
aplicaciones, se propone como estructura, en ambos casos
una función transferencial de segundo orden con retardo de
tiempo tal como muestra (5). [5]
(5)
Los valores estimados para los parámetros de cada modelo
matemático a partir de la herramienta descrita en [6] se
muestran en la Tabla 5.Los resultados de validación para los
modelos matemáticos con los parámetros estimados para
cada proceso se muestran en la Figura 6. [2]
Tabla 5: Parámetros de los modelos matemáticos de las
interacciones de las variables.
Modelo
Parámetros de los modelos matemáticos
K T1 [s] T2 [s] τ[s]
Temperatura -0.57 522 318 120
Humedad -0.64 385 371 100
Figura 8: Validación de los modelos matemáticos. (a)
Temperatura. ES=0.23 %, EPF=0.54 %, VAF=97.41 % (b)
Humedad relativa. ES=0.08 %, EPF=0.16 %, VAF=98.12%.
Diseño del controladores para las variables de interés en
la UMA
Aunque el objetivo fundamental de este trabajo es el diseño
de un controlador multivariable utilizando técnicas de
desacople e IMC se reajustarán los controladores existentes en
la planta para cada variable (PID) con los lazos de control
trabajando de forma independiente. De esta forma será
posible la comparación de los controladores resultantes y así
verificar si la propuesta realizada en este trabajo mejora los
índices de desempeño de los controladores actuales.
Controladores PID convencionales
A partir de los métodos clásicos de diseño de controladores
PID convencionales [7] y los modelos obtenidos para cada
proceso, sin considerar interacciones entre ambos procesos,
se obtienen los valores de los parámetros de la función
transferencial para cada controlador. Las funciones
transferenciales de los controladores PID se muestra en (12)
para la temperatura de impulsión y en (13) para la humedad
relativa.
(12)
(13)
Controlador multivariable IMC desacoplado (IMC-D)
El diseño de este controlador se divide en dos partes
siguiendo la Figura 9 primero se diseñan los controladores
IMC (GC1 y GC2) y después se lleva a cabo el desacople a
partir del modelo multivariable de la planta (cálculo de GI1 y
GI2).
Figura 9: Sistema de control multivariable utilizando
desacople por compensadores.
Teniendo en cuenta que de las posibles estructuras de
controladores IMC la única que puede ser implementada,
según los medios técnicos existentes en la planta, es la
estructura IMC-PID y que esta es superior a la estructura
IMC clásica [1], en este trabajo serán diseñados, para ambos
procesos, controladores del tipo IMC-PID. En el diseño de
ambos controladores se tuvo en cuenta el retardo de tiempo
presente en cada modelo identificado y el mismo fue
reemplazado por una aproximación de Pade de primer orden.
Quedando definidas de esta forma según el modelo de la
planta las componentes invertible y no invertible [8] para el
controlador de temperatura tal como se muestran en (18) y
para el controlador de humedad relativa tal como se](https://image.slidesharecdn.com/memoria-ix-selasi-2013-lv-150303085824-conversion-gate01/75/Memoria-ix-selasi-2013-lv-434-2048.jpg)
![IX Seminario Euro Latinoamericano de Sistemas de Ingeniería 2013
ISBN 978-980-7630-00-9
417
muestran en (19).
(18)
(19)
La función transferencial de los controladores resultantes se
presentan en (20) y (21), en función de las constantes de
tiempo de los filtros pasa bajo.
(20)
Existen varios criterios para la selección de la constante de
tiempo del filtro f [4 y 8]. Sin embargo según [8] todos
estos criterios solo aseguran un valor de partida que debe
ser mejorado a partir del método de prueba y error. Un buen
valor de f para el control de la temperatura sería f =175 y
para la humedad relativa sería f = 80 , para estos valores se
va a garantizar que no exista sobre impulso de la variable
controlada y un aceptable rechazo a las perturbaciones.
Para diseñar la estrategia de desacople y el cálculo de los
compensadores GI1 y GI2 [9] se consideran las interacciones
entre ambas variables tal como se muestra en la Figura 9.
Esto trae consigo que cambien las acciones de control que
para los controladores PID anteriores eran v1 y v2,
quedando para los IMC-PID diseñados como u1 y u2 tal
como se muestra en (22).
Partiendo de la Figura 9 es posible definir la salida del
sistema controlado como (23).
Donde G(s) se muestra en (24):
Sustituyendo en (24) los modelos obtenidos en la etapa de
identificación se llega a (25).
Las salidas del sistema de control teniendo en cuenta los
compensadores quedan como en (26).
y1 (G11 G12GI 2 )v1 (G11GI 1 G12 )v2
y2 (G21 G22GI 2 )v1 (G21GI 1 G22 )v2 (26)
Para eliminar las interacciones, o sea, que v1 solo afecte a
y1 y que v2 solo afecte a y2, entonces deben cumplirse (27)
y (28):
Teniendo cuenta estas condiciones y redefiniendo las
salidas se obtienen los valores de ambos compensadores
en (29) y (30):
3. RESULTADOS Y DISCUSIÓN
En esta sección se presentan y analizan los resultados de
simulación a partir de los controladores diseñados (PID e
IMC-D). Se realizarán tres simulaciones fundamentales, la
primera para observar el comportamiento del sistema
siguiendo la referencia y ante perturbaciones y las otras dos
para observar el rechazo a perturbaciones que pueden
aparecer tanto en la temperatura de impulsión como en la
humedad relativa. Como perturbación al sistema de control
de la temperatura de impulsión se va a considerar una
variación de un 5 % en la humedad relativa y como
perturbación al sistema de control de la humedad relativa se
va a considerar una variación de 3 °C en la temperatura. Para
aplicar ambas perturbaciones se espera a que el sistema se
haya establecido en la referencia.
Las Figuras 14 y 15 muestran en detalles las respuestas de
los sistemas de control ante perturbaciones. Se presenta en
las Figuras 14a y 15a la comparación entre las respuestas de
los sistemas de control perturbados para cada variable,
mientras en las Figuras 14b y 15b se muestra el efecto en la
otra variable, producto del rechazo a la perturbación. Como
se esperaba mientras los controladores que existen en la
actualidad en la planta (PID) se ven afectados por la
interacción existente entre ambas variables el controlador](https://image.slidesharecdn.com/memoria-ix-selasi-2013-lv-150303085824-conversion-gate01/75/Memoria-ix-selasi-2013-lv-435-2048.jpg)
![IX Seminario Euro Latinoamericano de Sistemas de Ingeniería 2013
ISBN 978-980-7630-00-9
418
propuesto (IMC-D) es capaz de rechazar la perturbación sin
que se vean afectadas la temperatura y la humedad relativa
como variables controladas.
Figura 14: (a) Respuesta simulada de una perturbación en la
humedad relativa. (b) Respuesta simulada del control de
temperatura de impulsión ante una perturbación en la
humedad relativa.
Figura 15. (a) Respuesta simulada de una perturbación en la
temperatura de impulsión. (b) Respuesta simulada del control
de humedad relativa ante una perturbación en la temperatura
de impulsión.
En la Figura 16 es posible apreciar como a pesar de que
ambos controladores garantizan un seguimiento de la
referencia el controlador IMC-D logra mejores índices de
desempeño de acuerdo a los requerimientos establecidos. El
IMC-D presenta un menor tiempo de establecimiento y no
tiene sobre impulso para las dos variables controladas. En
relación a las perturbaciones (se aplican ambas al mismo
tiempo) el IMC-D muestra un mejor desempeño que el PID
en ambos casos al punto de garantizar que las variables
controladas no salen en ningún momento de su valor de
referencia, no siendo así en el caso del PID.
Figura 16: Respuesta simulada de los controladores. (a)
Temperatura de impulsión. (b) Humedad relativa.
4. CONCLUSIONES
En este trabajo se obtuvieron los modelos matemáticos que
describen el comportamiento de los procesos de variación de
la temperatura de impulsión y la humedad relativa, así como
los modelos de la influencia que existe entre ambas variables
en una Unidad Manejadora de Aire utilizada para el control
de clima de un local de formulaciones. Utilizando los
modelos matemáticos obtenidos se lograron sintetizar para
cada caso un controlador PID y un controlador IMC-D. Las
simulaciones realizadas con estos controladores para los
modelos de ambos procesos y las interacciones entre ellos,
demostraron que todos los controladores diseñados son
capaces de rechazar tanto el efecto del retardo de tiempo
como el de las perturbaciones, así como seguir las
referencias impuestas. Hay que destacar que en el caso del
PID esto lo logra en grandes intervalos de tiempo con
oscilaciones y no eliminan la influencia que existe entre
ambas variables. Al aplicar y simular una estrategia de
control por desacople basada en modelo interno los tiempos
de establecimiento disminuyeron significativamente y las
oscilaciones tanto en el seguimiento de referencia como en el
rechazo a perturbaciones desaparecieron.
RECONOCIMIENTOS
Los autores expresan sus agradecimientos a las autoridades
del Centro Nacional de Biopreparados por permitir el uso de
su manejadora de aire y sus instalaciones, para la realización
de los experimentos que se muestran en este trabajo. Así
como al departamento de Automatización.
REFERENCIAS
1. FERNÁNDEZ, E.et al. “Diseño de un controlador IMC
para la temperatura de impulsión de una UMA”. XI
Simposio Internacional de Automática 2013, ISBN 978-959-
7213-02-4.
2. FERNÁNDEZ RODRÍGUEZ, Ernesto., DÍAZ
RODRÍGUEZ, Adriana., TORRES PÉREZ, Keila.
“Identificación de la temperatura y la humedad relativa en
una unidad manejadora de aire”. Revista Cubana de
Ingeniería, Vol. IV, No.1, feb. 2013. Disponible en:
<http://rci.cujae.edu.cu/index.php/rci/article/view/139>.
Fecha de acceso: 28 May. 2013.
3. AGUADO BEAR, Alberto. Temas de Identificación y
Control Adaptable. ICIMAF, 2000. Ciudad de La Habana.
4. RIVERA, Daniel. “Una metodología para la identificación
integrada con el diseño de controladores
IMC-PID”. Revista Iberoamericana de Automática e
Informática Industrial RIAI Vol. 4, No. 4, (2007) 5-18.
5. LJUNG, Lennart. System Identification: Theory for the
user. 2ª Ed. Prentice Hall, Upper Saddle
River, USA, 1999.
6. LJUNG, Lennart. System Identification Toolbox 7 User´s
Guide. [en línea] The MathWorks, Inc., USA, [ref. marzo
2007]. Disponible en Web:
http://www.worldcat.org/title/system-identification- toolbox-
7-users-guide/oclc/288640483 [consultado en enero 2012].
7. ÅSTRÖM, K. J. y HÄGGLUND, T. Control PID
Avanzado. Prentice Hall, Lund, Suecia, 2009.](https://image.slidesharecdn.com/memoria-ix-selasi-2013-lv-150303085824-conversion-gate01/75/Memoria-ix-selasi-2013-lv-436-2048.jpg)



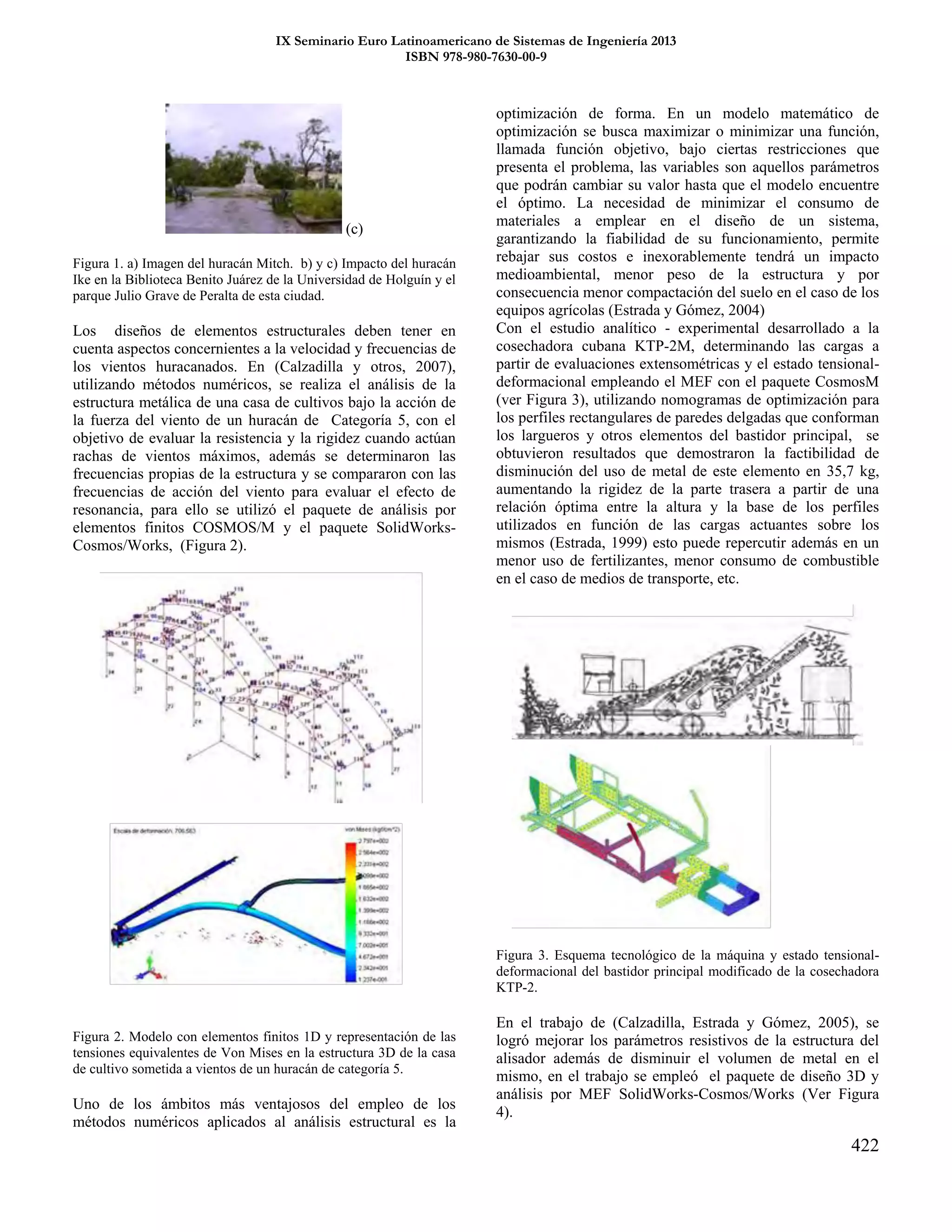
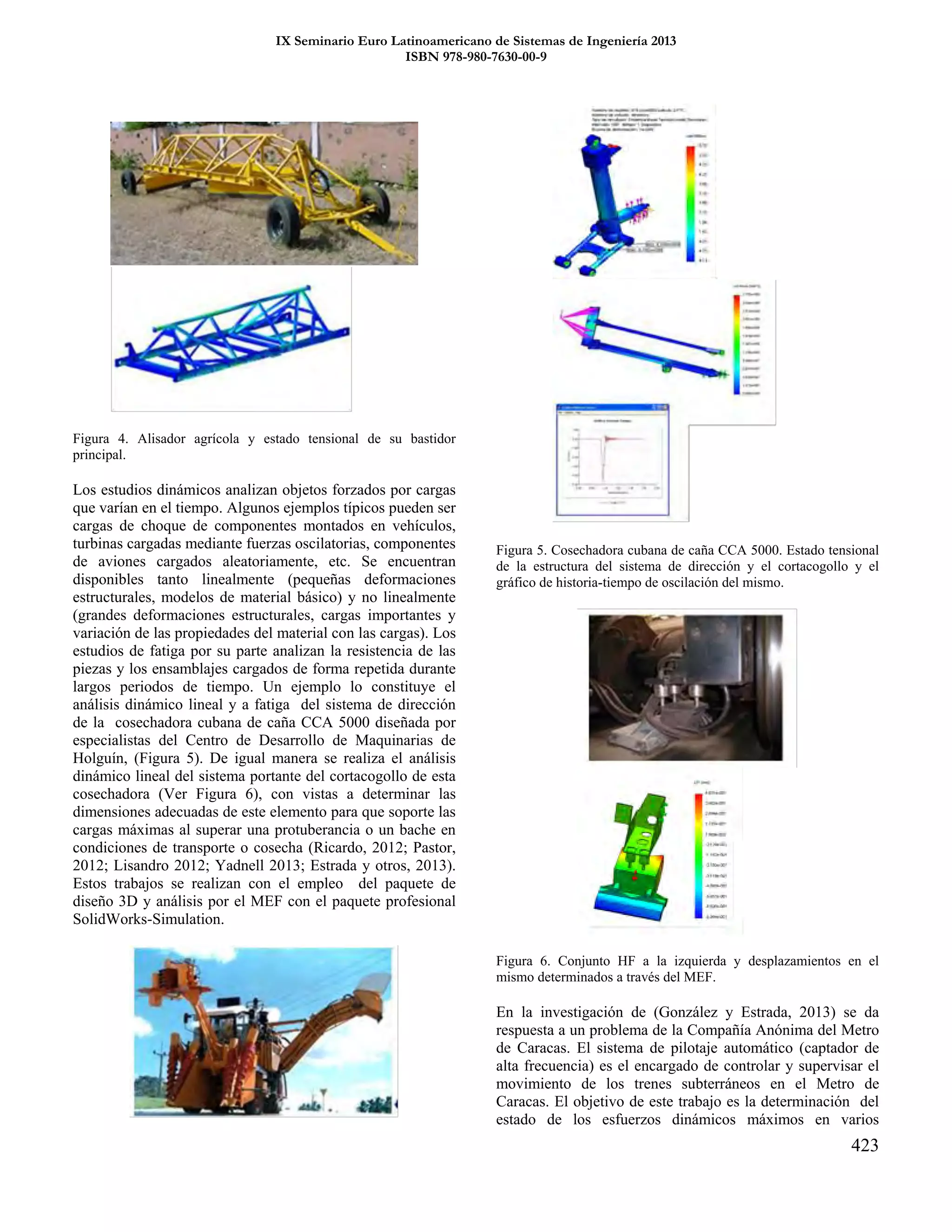


El IX Selasi 2013 se llevó a cabo del 12 al 15 de noviembre en La Victoria, Venezuela, organizado por la Universidad Politécnica Territorial del Estado Aragua y con un comité científico internacional. Este evento, que surgió como parte del proyecto 'Sistemas de Ingeniería para la Preparación y Toma de Decisiones', se ha consolidado como un espacio de intercambio científico en ingeniería desde su primera edición en 2005. La ciudad de La Victoria, con su historia rica y monumentos históricos, sirvió como un importante telón de fondo para este seminario internacional.