Descargar para leer sin conexión



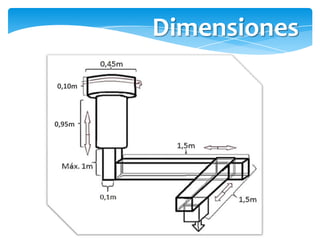

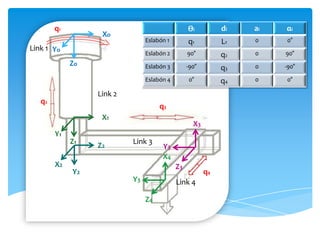
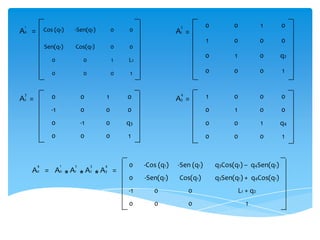


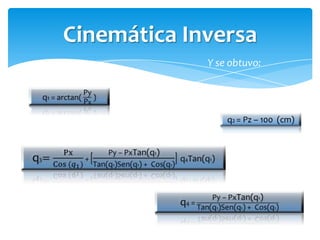

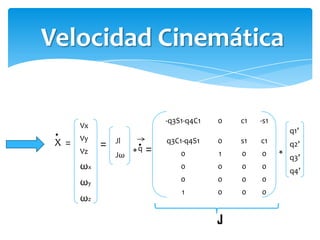
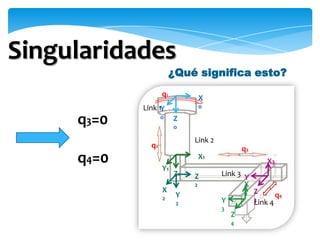
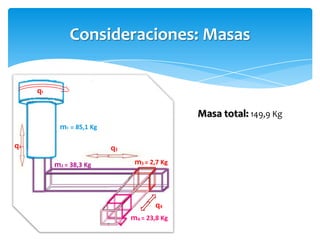
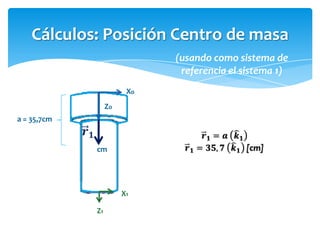
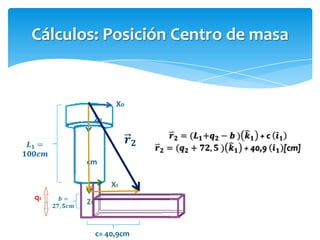
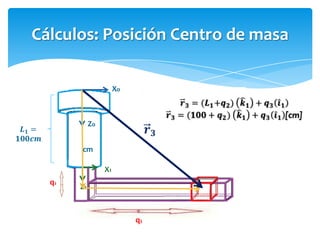
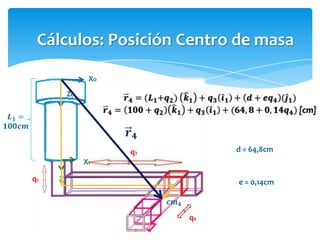
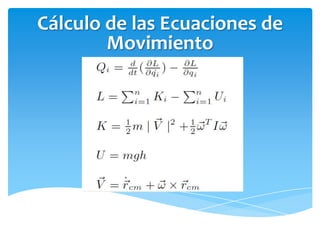
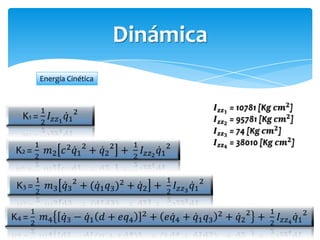
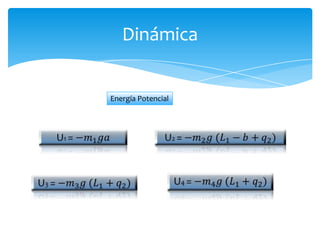
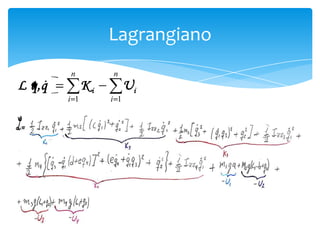
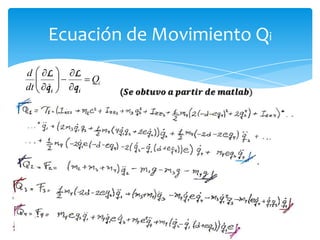


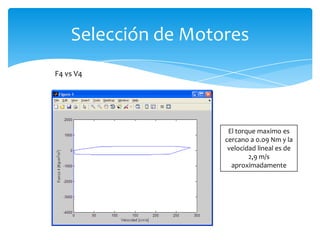
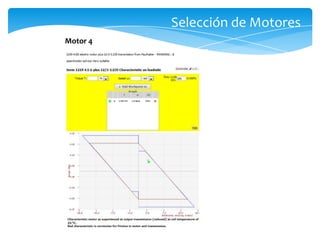








Este documento presenta el diseño de AMICU, un robot para cortar espejos. AMICU corta un vidrio en 4 cuadrantes usando 2 líneas rectas perpendiculares. Tiene 4 articulaciones y una herramienta de corte. Se calculan las ecuaciones cinemáticas directa e inversa, y se analizan las singularidades. También se calculan las ecuaciones de movimiento usando el lagrangiano. Se planifican trayectorias de corte y se seleccionan motores y sensores apropiados.











































