



































![Curva de velocidad
0.45
Velocidad [m/s]
2 4 6 8 10 12 14 16 18 20
Tiempo [unidades de T]
43](https://image.slidesharecdn.com/presentacincampus-110629220445-phpapp02/85/Presentacin-campus-43-320.jpg)

![90
Resultado: Ángulo de ataque
Ángulo de ataque [°]
86.5
2 4 6 8 10 12 14 16 18 20
Tiempo [unidades de T]
45](https://image.slidesharecdn.com/presentacincampus-110629220445-phpapp02/85/Presentacin-campus-45-320.jpg)
















![Centro de masa: x a=0.22 m, b=0.21 m
3
2.5
2
Distancia [m]
1.5
1
0.5
0
0 2 4 6 8 10 12 14 16 18 20
Tiempo [unidades de t]64](https://image.slidesharecdn.com/presentacincampus-110629220445-phpapp02/85/Presentacin-campus-64-320.jpg)
![Centro de masa: y a=0.22 m, b=0.21 m
0.225
0.22
0.215
Distancia [m]
0.21
0.205
0.2
0.195
0.19
0 2 4 6 8 10 12 14 16 18 20
Tiempo [unidades de t]65](https://image.slidesharecdn.com/presentacincampus-110629220445-phpapp02/85/Presentacin-campus-65-320.jpg)
![Centro de masa
1
0.8
0.6
0.4
0.2
y [m]
0
-0.2
-0.4
-0.6
-0.8
-1
1
0.8
0.6
0.4 0
0.2 0.5
0 1
-0.2 1.5
-0.4
-0.6 2
-0.8 2.5
-1 3
x [m]
z [m] 66](https://image.slidesharecdn.com/presentacincampus-110629220445-phpapp02/85/Presentacin-campus-66-320.jpg)
![1.6
Resultados
Velocidad [m/s]
2 4 6 8 10 12 14 16 18 20
Tiempo [unidades de T] 67](https://image.slidesharecdn.com/presentacincampus-110629220445-phpapp02/85/Presentacin-campus-67-320.jpg)
![Resultados
90
Ángulo de ataque [°]
78
2 4 6 8 10 12 14 16 18 20
Tiempo [unidades de T] 68](https://image.slidesharecdn.com/presentacincampus-110629220445-phpapp02/85/Presentacin-campus-68-320.jpg)
![Curva de velocidad
O n=10; v=0.9 m/s; elongación máxima
0.9
Velocidad [m/s]
2 4 6 8 10 12 14 16 18 20
69
Tiempo [unidades de T]](https://image.slidesharecdn.com/presentacincampus-110629220445-phpapp02/85/Presentacin-campus-69-320.jpg)
![Ángulo de ataque: 79,3°
90
Ángulo de ataque [°]
80
2 4 6 8 10 12 14 16 18 20
70
Tiempo [unidades de T]](https://image.slidesharecdn.com/presentacincampus-110629220445-phpapp02/85/Presentacin-campus-70-320.jpg)
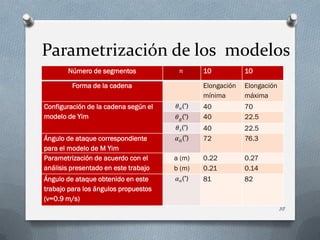
![MÉTRICAS
8 10 14
m [kg] 0.88 1.1 1.54
v [m/s] 0.9 > 0.9 > 0.9
P [W] 86.4 108 146.2
5.6 <5.6 <5.6
Ángulo [°] 45 < 45 <45
η
71](https://image.slidesharecdn.com/presentacincampus-110629220445-phpapp02/85/Presentacin-campus-71-320.jpg)


Este documento resume investigaciones previas sobre robots modulares y cadenas articuladas cerradas. Propone el desarrollo de un robot móvil modular con una cadena articulada cerrada que se mueva mediante rodadura. Describe los modelos cinemáticos y dinámicos requeridos para analizar el movimiento de la cadena, incluyendo parámetros como el ángulo de ataque, la elongación y la velocidad. El objetivo es explorar terrenos irregulares de forma eficiente y flexible.


























































































