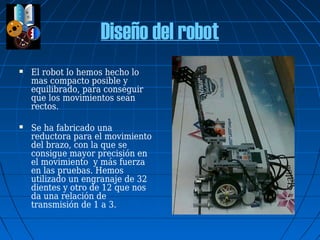
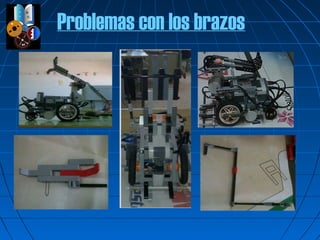
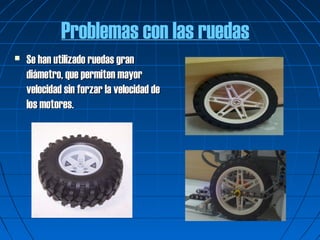
El documento describe el diseño de un robot, incluyendo detalles sobre su brazo retráctil con engranajes para mayor precisión, los sensores de luz, color y rotación que utiliza, el uso de ruedas grandes para mayor velocidad y el lenguaje de programación por bloques usado para controlar los motores de forma independiente.