Descargado 63 veces





![Definición del sistema de control
n
Esquemas de relés
– representación de sistemas sencillos: señales lógicas binarias t odo nada (digitales), o bloques secuenciales predefinidos, como
temporizadores y contadores.
– Deficiencias en cuanto a la representación de funciones secuenci ales
complejas y sobre todo en la manipulación de señales digitales d e
varios bits (por ejemplo, las obtenidas de una conversión A/D).
– Utilizado por electricistas o ingenieros con formación eléctrica
13
Autómatas Programables
ISA- U M H
©
T D O C - 99
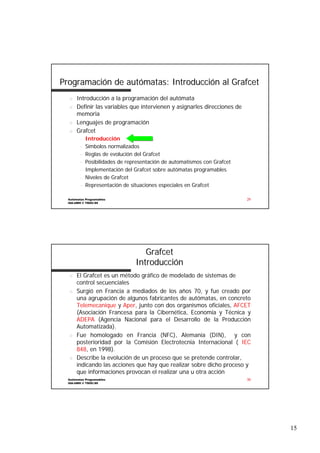
Definición del sistema de control
n
Esquema de relés
X1
Función Lógica :
X2
[( X 1 ⋅ X 2 ) + ( X 4 ⋅ X 5 ) + Y 1]⋅ X 3 = Y 1
X4
Y1
X5
X3
Y1
Autómatas Programables
ISA- U M H
©
14
T D O C - 99
7](https://image.slidesharecdn.com/presentaciongrafcet-140305234637-phpapp02/85/Presentaciongrafcet-7-320.jpg)



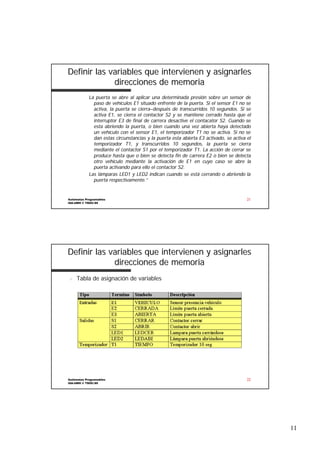
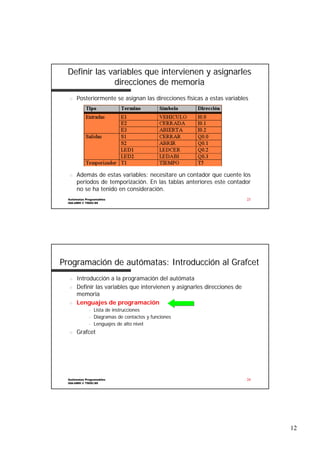













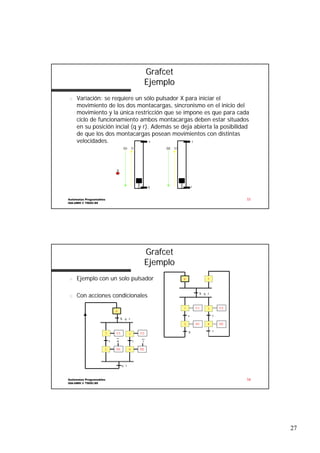
















El documento presenta una introducción a la programación de autómatas. Explica que la primera etapa consiste en definir el sistema de control mediante diferentes herramientas como descripciones literales, funciones algebraicas, esquemas de relés, diagramas lógicos o el Grafcet. A continuación, se debe identificar las variables involucradas y asignarles direcciones de memoria. Finalmente, introduce diferentes lenguajes de programación como listas de instrucciones, diagramas de contactos o lenguajes de alto nivel para implementar el programa en el autómata.











































