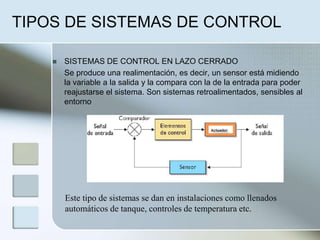
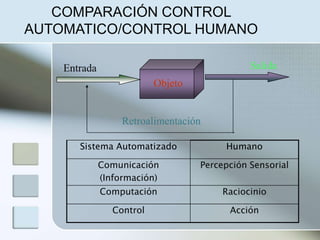
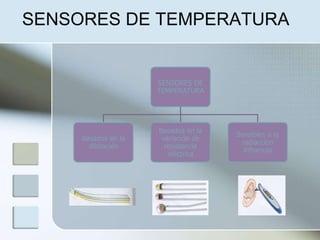
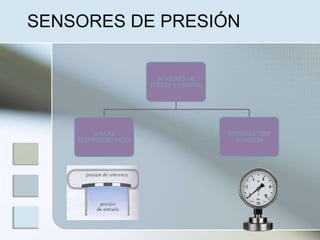
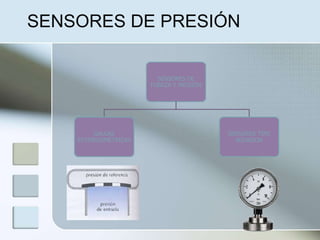
El documento describe los conceptos básicos de los sistemas de control. Explica que un sistema de control está compuesto por sensores, controladores y actuadores. También describe los tipos de sistemas de control, como los de lazo abierto y lazo cerrado. Por último, presenta ejemplos de sensores y cómo funciona el control mediante autómatas programables.