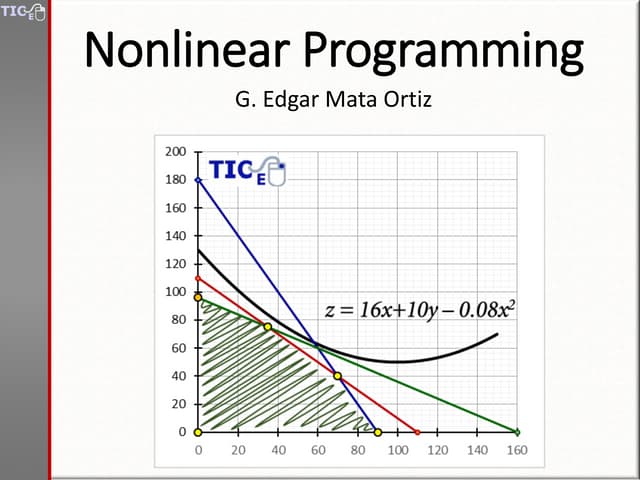
Este documento describe la programación no lineal, que involucra optimizar funciones no lineales sujetas a restricciones. Explica que la programación no lineal es más general que la programación lineal y puede modelar problemas del mundo real con mayor precisión. También resume varios métodos para resolver problemas de programación no lineal, como el uso de algoritmos de programación lineal, ramificación y poda, y condiciones de Karush-Kuhn-Tucker.