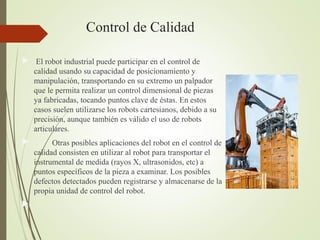
Este documento proporciona una introducción a varias aplicaciones de robótica industrial, incluyendo trabajos en fundición, transferencia de material, paletización, carga y descarga de máquinas, operaciones de procesamiento, montaje, control de calidad y manipulación en salas blancas. Explica brevemente los usos de los robots en cada una de estas aplicaciones industriales.