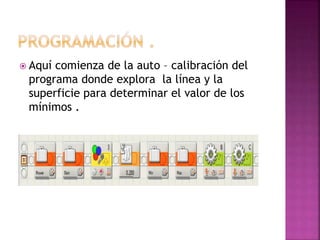
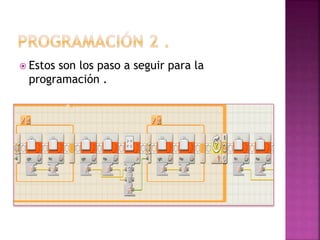
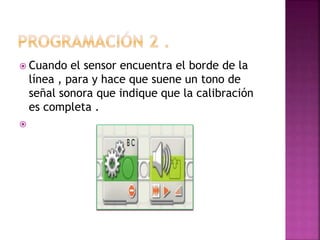
El documento describe tres pasos para programar un robot seguidor de línea: 1) establecer un umbral de color para detectar la línea, 2) determinar la velocidad máxima del robot en función de su energía, y 3) usar los valores de color para controlar la dirección y giro del robot. También explica que el programa calibra automáticamente explorando la línea y superficie para establecer valores mínimos, y que cuando encuentra el borde de la línea, se detiene y suena una señal para indicar que la calibración está completa.


















































![[A4 y OCR] STC. n.° 00728-2008-PHC/TC Lima; 13 OCT. 2008. Debida motivación. 24p](https://cdn.slidesharecdn.com/ss_thumbnails/a4yocrstc-260125044250-895edfca-thumbnail.jpg?width=640&height=640&fit=bounds)






