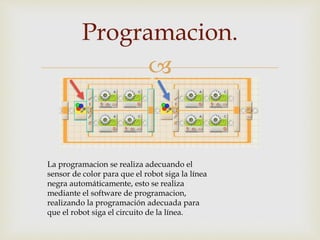
Este documento describe cómo programar un robot seguidor de línea utilizando el sensor de color NXT 2.0. Explica que se deben calibrar los valores del sensor para distinguir entre el blanco y el negro, y que la programación debe hacer que el robot gire cuando detecte el blanco y avance cuando detecte el negro. También menciona que se proporcionan dos enfoques de programación, uno simple de dos estados y otro más complejo y proporcional. Finalmente, un video muestra el robot siguiendo la línea exitosamente.