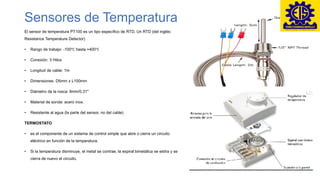
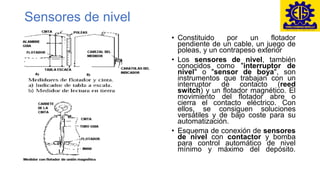
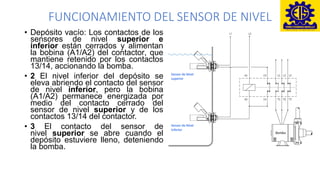
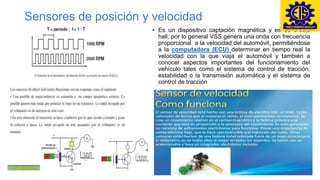
Este documento trata sobre sensores industriales. Explica que un sensor convierte magnitudes físicas o químicas en señales eléctricas y que existen diferentes tipos de sensores como de temperatura, nivel, presión, posición y presencia. También describe conceptos sobre transductores, que convierten la señal del sensor en una forma usable para sistemas de control, y características importantes de los sensores como rango, precisión y tiempo de respuesta.