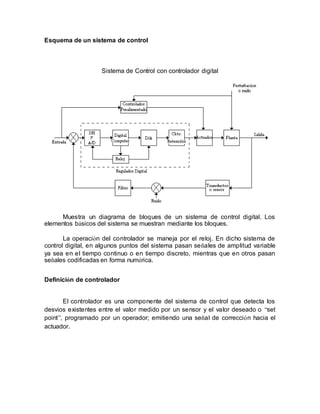
Este documento describe los diferentes tipos de controladores y sus modelos matemáticos. Explica el control de dos posiciones u encendido/apagado, control proporcional, integral, proporcional integral, proporcional derivativo y proporcional integral derivativo. También describe controladores electrónicos y las acciones de control en la respuesta del sistema, con un ejemplo de control proporcional. Concluye que la teoría de control es importante para comprender el funcionamiento de sistemas dinámicos y mejorar el desempeño a través del control automático