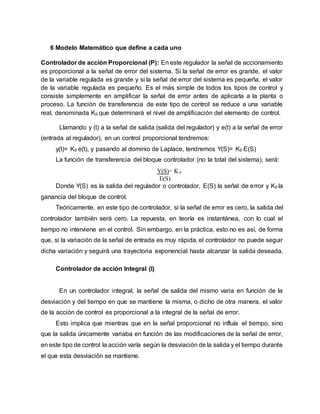
Este documento describe los diferentes tipos de controladores industriales, incluyendo controladores proporcionales, integrales, derivativos y PID. Explica que los controladores son instrumentos que comparan valores medidos con valores deseados para corregir errores y controlar procesos industriales de manera automática y eficiente.