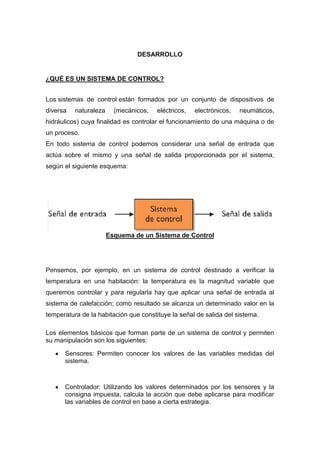
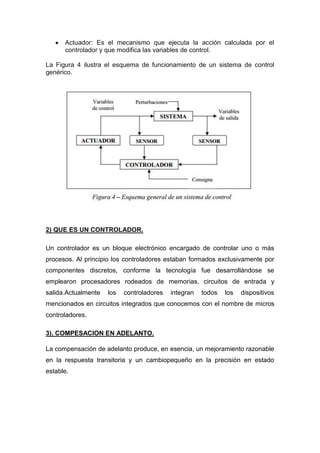
Este documento describe los conceptos básicos de los sistemas de control y los controladores. 1) Explica los elementos clave de un sistema de control como sensores, controladores y actuadores. 2) Define un controlador como un bloque electrónico que controla uno o más procesos. 3) Describe las compensaciones en adelanto y atraso y cómo afectan la respuesta del sistema.