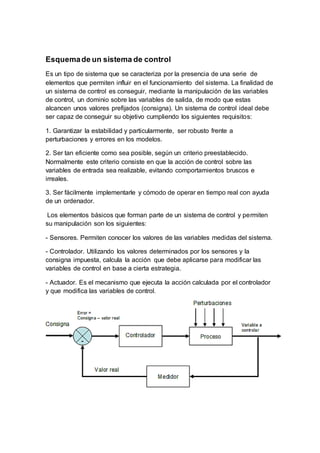
Este documento describe los diferentes tipos de controladores y sus acciones de control. Explica que un controlador compara el valor medido con el valor deseado y calcula un error para actuar y corregirlo. Luego describe los tipos principales de controladores: de dos posiciones, proporcional, integral, proporcional-integral, proporcional-derivativo y proporcional-integral-derivativo. Finalmente, concluye que los controladores son eficientes para ejecutar procesos ya que tienen una gran variedad de aplicaciones industriales y domésticas.