
Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Destacado
Destacado (20)
Similar a Momento de fuerza bidimensional
Similar a Momento de fuerza bidimensional (20)
Momento de fuerza bidimensional
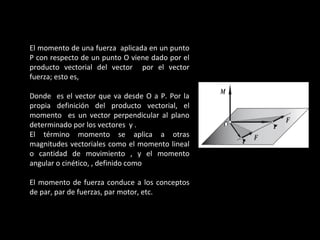
- 1. El momento de una fuerza aplicada en un punto P con respecto de un punto O viene dado por el producto vectorial del vector por el vector fuerza; esto es, Donde es el vector que va desde O a P. Por la propia definición del producto vectorial, el momento es un vector perpendicular al plano determinado por los vectores y . El término momento se aplica a otras magnitudes vectoriales como el momento lineal o cantidad de movimiento , y el momento angular o cinético, , definido como El momento de fuerza conduce a los conceptos de par, par de fuerzas, par motor, etc.
- 2. Cuando se consideran problemas mecánicos bidimensionales, en los que todas las fuerzas y demás magnitudes vectoriales son coplanarias, el cálculo de momentos se simplifica notablemente. Eso se debe a que los momentos serían perpendiculares al plano de coplanariedad y, por tanto, sumar momentos se reduciría a sumar tan sólo sus componentes perpendiculares al plano, que son magnitudes escalares. Si se considera una fuerza aplicada en un punto P del plano de trabajo y otro punto O sobre el mismo plano, el módulo del momento en O viene dado por: siendo F el módulo de la fuerza, b el brazo de momento, es decir, la distancia a la que se encuentra el punto O (en el que tomamos momento) de la recta de aplicación de la fuerza, y el suplementario del ángulo que forman los dos vectores. La dirección de un momento es paralela al eje de momento, el cual es perpendicular al plano que contiene la fuerza F, y por su brazo de momento d. Para establecer la dirección se utiliza la regla de la mano derecha.
- 3. REACCIONES EN APOYOS Y CONEXIONES Reacciones en puntos de apoyo y conexiones para una estructura tridimensionalEn una estructura tridimensional, las reacciones abarcan desde una sola fuerza dedirección conocida, que ejerce una superficie sin fricción, hasta un sistema fuerza-par ejercido por un apoyo fijo. Por tanto en los problemas que involucran elequilibrio de una estructura tridimensional pueden existir entre una y seisincógnitas asociadas con la reacción correspondiente a cada apoyo o conexión,una forma sencilla de determinar tanto el tipo de reacción correspondiente a unapoyo o conexión dado como el numero de incógnitas involucradas, consiste enestablecer cuales de los seis movimientos fundamentales.Por ejemplo los apoyos de la bola y cuenca o de rotula, las superficies sin ficción(lisas) y los cables solo impiden la traslación en una dirección y, por tanto, ejercenuna sola fuerza cuya línea de acción es conocida: así, cada uno de estos apoyosinvolucran una incógnita, la cual esta dada por la magnitud de la reacción. Losrodillos sobre superficies rugosas y las ruedas sobre rieles impiden la traslación endos direcciones; por consiguiente, las reacciones correspondientes consisten endos componentes de fuerza desconocidas. Las superficies rugosas en contactodirecto y las rotulas (bola y cuenca) impiden la traslación en tres direcciones; portanto estos apoyos involucran tres componentes de fuerza desconocidas