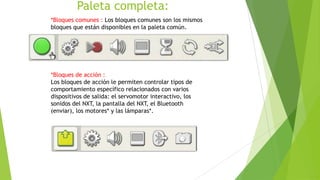
Este documento presenta el sistema LEGO Mindstorms Education, una plataforma de robótica educativa. Explica que los estudiantes pueden diseñar, construir y programar robots usando piezas LEGO y el ladrillo inteligente NXT. También describe los diferentes sensores y motores que permiten a los robots responder a estímulos del entorno y moverse. El documento provee instrucciones sobre cómo usar el software y hardware de la plataforma.

























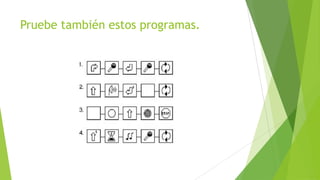
![Programa NXT
No necesita un ordenador para
programar un robot. Puede crear
muchos programas sin su
ordenador, utilizando el submenú
Programa del NXT [NXT
Program].Pruebe este programa
para ver lo fácil que es.Haga que
el robot retroceda y avance
cuando se presiona el sensor
táctil. Primero, el robot se
moverá hacia delante hasta que
se presione el sensor táctil y
luego se moverá hacia atrás. Al
presionar el sensor táctil
nuevamente, el robot se moverá
otra vez hacia delante. Esto
continuará indenidamente hasta
que usted detenga el programa](https://image.slidesharecdn.com/informatica2-130502104834-phpapp01/85/trabajo-de-lesmes-26-320.jpg)
![Utilice los botones
de las echas gris
claro para moverse
por las opciones y
luego presione el
botón naranja de
Intro [Enter] para
seleccionar
Seleccione
Táctil [Touch].
Seleccione
Atrás
(Backward).](https://image.slidesharecdn.com/informatica2-130502104834-phpapp01/85/trabajo-de-lesmes-27-320.jpg)
![Seleccione Táctil
[Touch]
nuevamente.
Ahora seleccione
Bucle [Loop] para
hacer que el
programa se ejecute
una y otra vez hasta
que usted apague el
NXT
Ahora puede
ejecutar el
programa.
Simplemente
seleccione
Ejecutar [Run].](https://image.slidesharecdn.com/informatica2-130502104834-phpapp01/85/trabajo-de-lesmes-28-320.jpg)
![Pruébeme
La función Pruébeme [Try Me] le permite experimentar
con los sensores y los motores utilizando programas que
están listos para ejecutar.Para comenzar, presione la
echa gris claro a la izquierda para dirigirse a Pruébeme
(Try Me). Luego presione el botón naranja para
seleccionar Pruébeme.](https://image.slidesharecdn.com/informatica2-130502104834-phpapp01/85/trabajo-de-lesmes-30-320.jpg)
![Registro de datos de NXT
El submenú Registro de datos de NXT [NXT Datalog] te
permite recopilar datos registrándolos sin necesidad de
tener conexión con tu ordenador.La ejecución de un
programa de Registro de datos de NXT crea un archivo de
registro que se guarda en el ladrillo NXT y que puede
importarse en tu ordenador.](https://image.slidesharecdn.com/informatica2-130502104834-phpapp01/85/trabajo-de-lesmes-31-320.jpg)
![Registro de datos de NXT
Selecciona Ejecutar [Run]
El programa de registro
de datos se ejecuta
continuamente.
Para guardar un programa de
Registro de datos de NXT en tu
ladrillo NXT, pulsa en Guardar
[Save]
El programa de Registro de datos de
NXT te muestra el nombre del archivo
de registro guardado.](https://image.slidesharecdn.com/informatica2-130502104834-phpapp01/85/trabajo-de-lesmes-32-320.jpg)
![Ver
.En el submenú Ver [View], puede realizar una prueba
rápida de sus sensores y motores y observar los datos
actuales para cada uno](https://image.slidesharecdn.com/informatica2-130502104834-phpapp01/85/trabajo-de-lesmes-33-320.jpg)
![Conguración
En el submenú Conguración [Settings], puede ajustar las
distintas conguraciones del NXT, como el volumen del
altavoz o el modo suspendido [Sleep]. En este submenú,
también puede eliminar los programas que haya
almacenado en la memoria del NXT](https://image.slidesharecdn.com/informatica2-130502104834-phpapp01/85/trabajo-de-lesmes-34-320.jpg)
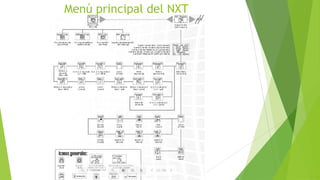
![Bluetooth: menú principal del NXT
En el submenú Bluetooth [Bluetooth], puede congurar una
conexión inalámbrica entre su NXT y otros dispositivos Bluetooth,
como otras unidades NXT, teléfonos móviles y ordenadores . Puede
utilizar una conexión inalámbrica para descargar programas sin
utilizar un cable USB. Hasta puede programar un teléfono móvil
para controlar el NXT.](https://image.slidesharecdn.com/informatica2-130502104834-phpapp01/85/trabajo-de-lesmes-35-320.jpg)






![Servomotor interactivo
Los tres servomotores interactivos
le proporcionan al robot la
capacidad de moverse. El bloque
Desplazar [Move] automáticamente
alinea sus velocidades para que el
robot se mueva suavemente.
Sensor de rotación:
integradoTodos los servomotores interactivos disponen
de un sensor de rotación integrado. La retroacción
rotacional le permite al NXT controlar los movimientos
de forma muy precisa. El sensor de rotación integrado
mide las rotaciones del motor en grados (precisión de +/-
un grado) o en rotaciones completas. Una rotación son
360 grados, por lo tanto si congura el motor para que
gire 180 grados, la pieza central de la rueda realizará
medio giro.](https://image.slidesharecdn.com/informatica2-130502104834-phpapp01/85/trabajo-de-lesmes-43-320.jpg)