Este documento presenta un resumen de tres capítulos sobre ecuaciones diferenciales de orden superior y su aplicación en la modelación de la deflexión de vigas. En el capítulo 1 se define una ecuación diferencial de orden superior y se explica cómo resolver ecuaciones diferenciales lineales de orden superior. El capítulo 2 define la deflexión de una viga y los factores que la afectan. El capítulo 3 explica cómo usar ecuaciones diferenciales de orden superior para modelar matemáticamente la deflexión de una viga sujeta a condiciones de frontera.








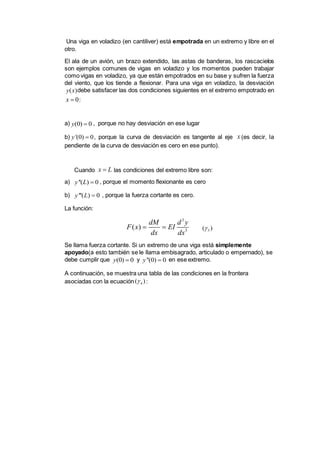
![ Al calcular los momentos adoptaremos la convención de que fuerzas
hacia arriba producen momentos negativos y fuerzas hacia abajo
producen momentos positivos, asumiendo por supuesto que el eje y
se toma hacia abajo como se mencionó antes. No importa cuál lado
de x se tome puesto que los momentos flectores calculados desde
cualquier lado son iguales.
El momento flector en x está simplemente relacionado con el radio
de curvatura de la curva elástica en x, siendo la relación:
𝑀(𝑥) = 𝐸𝐼 .
𝑌``
[1 + (𝑌′)2]3/2
Donde:
E: es el módulo de elasticidad de Young y depende del
material usado en el diseño de la viga.
I: es el momento de inercia de la sección transversal de la
viga en x con respecto a una línea horizontal que pasa
por el centro de gravedad de esta sección transversal. El
producto EI se llama la rigidez y se considerará como una
constante.
Si asumimos que la viga se dobla sólo levemente, lo cual es válido para
muchos propósitos prácticos, la pendiente y’ de la curva elástica es tan
pequeña que su cuadrado es despreciable comparado con 1, y la ecuación
se puede remplazar por la buena aproximación:
𝑀(𝑋) = 𝐸𝐼. 𝑦′′](https://image.slidesharecdn.com/trabajogrupal1-170813012827/85/Trabajo-grupal1-11-320.jpg)















![Ecuaciones diferenciales parciales[1]](https://cdn.slidesharecdn.com/ss_thumbnails/ecuacionesdiferencialesparciales1-140512174707-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)






































